Visual place recognition for aerial imagery: A survey

0

Sign in to get full access
Overview
- Provides a comprehensive survey of visual place recognition (VPR) techniques for aerial imagery
- Covers a range of approaches, including traditional feature-based methods, deep learning-based methods, and more recent developments
- Highlights the unique challenges and requirements of VPR for aerial data, such as viewpoint changes, scale variations, and illumination changes
- Discusses the applications of VPR in domains like robotics, mapping, and surveillance
Plain English Explanation
Visual place recognition (VPR) is the task of identifying a specific location or scene within a larger area using visual information, like images or videos. This is particularly important for aerial imagery, where drones, satellites, or other aerial platforms capture views of the world from above.
The paper reviewed here surveys the various techniques researchers have developed for VPR in aerial imagery. Traditional approaches relied on identifying distinctive visual features, like corners, lines, or textures, and matching them across different views of the same place. More recently, deep learning-based methods have become popular, where neural networks are trained to recognize and match visual patterns.
Compared to ground-level VPR, aerial VPR poses some unique challenges. The viewpoint and scale of the imagery can vary significantly, and lighting conditions may change dramatically. The paper discusses how researchers have adapted VPR algorithms to handle these challenges and enable applications like robotic navigation, large-scale mapping, and collaborative surveillance.
Technical Explanation
The paper provides a comprehensive overview of the state-of-the-art in visual place recognition (VPR) for aerial imagery. It covers a range of approaches, including traditional feature-based methods and more recent deep learning-based techniques.
Traditional feature-based methods rely on identifying and matching distinctive visual features, such as corners, lines, or textures, across different views of the same place. These approaches often involve steps like interest point detection, feature descriptor computation, and feature matching. The paper discusses the strengths and limitations of various feature-based VPR algorithms in the context of aerial imagery.
In contrast, deep learning-based VPR methods use neural networks to learn visual representations that are robust to changes in viewpoint, scale, and illumination. The paper reviews several deep learning architectures and training strategies that have been proposed for aerial VPR, including end-to-end learning and federated learning approaches.
The paper also discusses the unique challenges of VPR for aerial imagery, such as the need to handle large viewpoint and scale variations, as well as significant changes in lighting conditions. It reviews techniques that have been developed to address these challenges, including the use of large-scale datasets and transfer learning strategies.
Critical Analysis
The paper provides a thorough and well-researched survey of visual place recognition (VPR) techniques for aerial imagery. It covers a wide range of approaches, from traditional feature-based methods to more recent deep learning-based techniques, and highlights the unique challenges and requirements of VPR in the aerial domain.
One potential limitation of the survey is that it may not fully capture the most recent developments in the field, as the paper was published in 2024. The authors acknowledge this and encourage readers to stay up-to-date with the rapidly evolving research landscape.
Additionally, while the paper provides a comprehensive technical overview, it may not always be accessible to a general audience. Some of the concepts and terminology used may be unfamiliar to non-experts. The authors could have included more explanatory examples or analogies to help readers better understand the core ideas.
That said, the paper does an excellent job of highlighting the important applications of aerial VPR, such as in robotics, mapping, and surveillance. It also raises thought-provoking questions about the ethical and societal implications of these technologies, which readers may want to explore further.
Overall, this survey serves as a valuable resource for researchers and practitioners working in the field of aerial imagery and visual place recognition. It provides a solid foundation for understanding the current state of the art and identifying promising areas for future research.
Conclusion
This survey paper provides a comprehensive overview of the state-of-the-art in visual place recognition (VPR) for aerial imagery. It covers a range of traditional feature-based and deep learning-based approaches, highlighting the unique challenges and requirements of VPR in the aerial domain.
The paper discusses how VPR techniques can enable a variety of applications, such as robotic navigation, large-scale mapping, and collaborative surveillance. It also raises important questions about the ethical and societal implications of these technologies.
While the technical details may not be accessible to all readers, the paper serves as a valuable resource for researchers and practitioners working in the field of aerial imagery and visual place recognition. By understanding the current state of the art and the key trends in the field, readers can better identify promising avenues for future research and development.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Visual place recognition for aerial imagery: A survey
Ivan Moskalenko, Anastasiia Kornilova, Gonzalo Ferrer
Aerial imagery and its direct application to visual localization is an essential problem for many Robotics and Computer Vision tasks. While Global Navigation Satellite Systems (GNSS) are the standard default solution for solving the aerial localization problem, it is subject to a number of limitations, such as, signal instability or solution unreliability that make this option not so desirable. Consequently, visual geolocalization is emerging as a viable alternative. However, adapting Visual Place Recognition (VPR) task to aerial imagery presents significant challenges, including weather variations and repetitive patterns. Current VPR reviews largely neglect the specific context of aerial data. This paper introduces a methodology tailored for evaluating VPR techniques specifically in the domain of aerial imagery, providing a comprehensive assessment of various methods and their performance. However, we not only compare various VPR methods, but also demonstrate the importance of selecting appropriate zoom and overlap levels when constructing map tiles to achieve maximum efficiency of VPR algorithms in the case of aerial imagery. The code is available on our GitHub repository -- https://github.com/prime-slam/aero-vloc.
Read more6/4/2024

0
Register assisted aggregation for Visual Place Recognition
Xuan Yu, Zhenyong Fu
Visual Place Recognition (VPR) refers to the process of using computer vision to recognize the position of the current query image. Due to the significant changes in appearance caused by season, lighting, and time spans between query images and database images for retrieval, these differences increase the difficulty of place recognition. Previous methods often discarded useless features (such as sky, road, vehicles) while uncontrolled discarding features that help improve recognition accuracy (such as buildings, trees). To preserve these useful features, we propose a new feature aggregation method to address this issue. Specifically, in order to obtain global and local features that contain discriminative place information, we added some registers on top of the original image tokens to assist in model training. After reallocating attention weights, these registers were discarded. The experimental results show that these registers surprisingly separate unstable features from the original image representation and outperform state-of-the-art methods.
Read more5/21/2024
0
Collaborative Visual Place Recognition through Federated Learning
Mattia Dutto, Gabriele Berton, Debora Caldarola, Eros Fan`i, Gabriele Trivigno, Carlo Masone
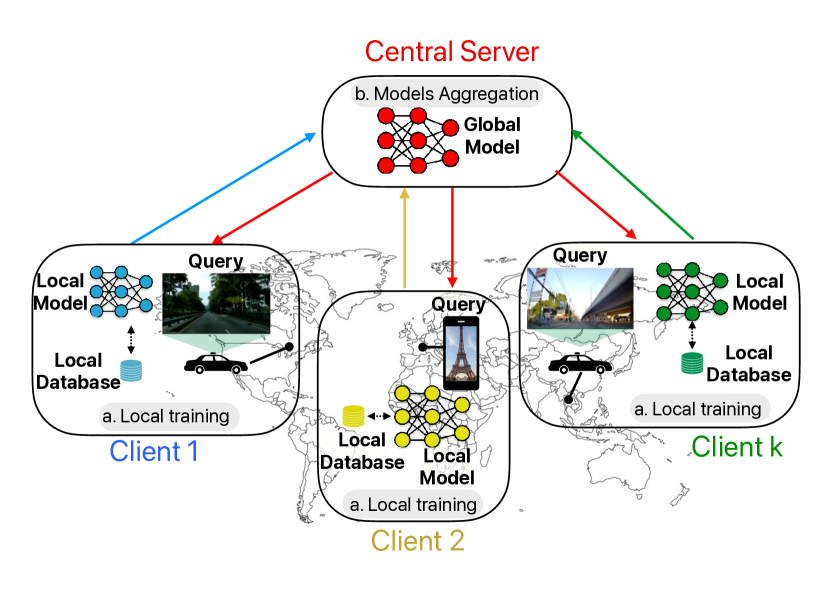
Visual Place Recognition (VPR) aims to estimate the location of an image by treating it as a retrieval problem. VPR uses a database of geo-tagged images and leverages deep neural networks to extract a global representation, called descriptor, from each image. While the training data for VPR models often originates from diverse, geographically scattered sources (geo-tagged images), the training process itself is typically assumed to be centralized. This research revisits the task of VPR through the lens of Federated Learning (FL), addressing several key challenges associated with this adaptation. VPR data inherently lacks well-defined classes, and models are typically trained using contrastive learning, which necessitates a data mining step on a centralized database. Additionally, client devices in federated systems can be highly heterogeneous in terms of their processing capabilities. The proposed FedVPR framework not only presents a novel approach for VPR but also introduces a new, challenging, and realistic task for FL research, paving the way to other image retrieval tasks in FL.
Read more4/23/2024

0
Matched Filtering based LiDAR Place Recognition for Urban and Natural Environments
Therese Joseph, Tobias Fischer, Michael Milford
Place recognition is an important task within autonomous navigation, involving the re-identification of previously visited locations from an initial traverse. Unlike visual place recognition (VPR), LiDAR place recognition (LPR) is tolerant to changes in lighting, seasons, and textures, leading to high performance on benchmark datasets from structured urban environments. However, there is a growing need for methods that can operate in diverse environments with high performance and minimal training. In this paper, we propose a handcrafted matching strategy that performs roto-translation invariant place recognition and relative pose estimation for both urban and unstructured natural environments. Our approach constructs Birds Eye View (BEV) global descriptors and employs a two-stage search using matched filtering -- a signal processing technique for detecting known signals amidst noise. Extensive testing on the NCLT, Oxford Radar, and WildPlaces datasets consistently demonstrates state-of-the-art (SoTA) performance across place recognition and relative pose estimation metrics, with up to 15% higher recall than previous SoTA.
Read more9/9/2024