Evaluation and Deployment of LiDAR-based Place Recognition in Dense Forests

0
Sign in to get full access
Overview
- This paper evaluates and deploys a LiDAR-based place recognition system in dense forest environments.
- The goal is to enable robots to navigate and localize effectively in challenging outdoor terrains.
- The researchers tested their system in real-world forest settings and provide insights into its performance.
Plain English Explanation
The paper describes research into using a type of laser-based sensor called LiDAR to help robots recognize and remember specific locations in dense forests. This is an important capability for robots that need to navigate and explore outdoor environments, which can be very complex and difficult for them to understand.
The researchers tested their LiDAR-based place recognition system by deploying it in real forest settings, rather than just in a lab. This allowed them to see how well it would work in the real world, where there are many obstacles, varying terrain, and changing environmental conditions that can make it hard for robots to know where they are.
By evaluating the system's performance in these challenging forest environments, the researchers were able to gain insights into both its strengths and limitations. This information can then be used to improve the technology and make it more reliable and effective for real-world robotic applications.
Technical Explanation
The paper presents an evaluation and deployment of a LiDAR-based place recognition system in dense forest environments. The goal is to enable robots to effectively navigate and localize themselves in complex outdoor terrains, which is a key capability for autonomous forest exploration and inventory.
The researchers tested their place recognition system in real-world forest settings, going beyond previous evaluations in controlled lab environments. This allowed them to assess the system's performance under more realistic and challenging conditions, including variable terrain, dense vegetation, and changing environmental factors.
The technical approach uses LiDAR sensor data to build 3D maps of the forest environment. These maps are then used as the basis for place recognition, where the system tries to match current sensor observations to previously mapped locations.
The evaluation involved deploying the system on an autonomous ground robot and testing it across multiple forest sites. The researchers analyzed metrics like localization accuracy, robustness to environmental changes, and computational efficiency to understand the system's strengths and limitations.
The insights gained from this real-world deployment can inform further improvements to LiDAR-based navigation and mapping for robots operating in dense, unstructured outdoor environments like forests.
Critical Analysis
The paper provides a thorough evaluation of the LiDAR-based place recognition system in challenging forest conditions, which is a valuable contribution to the field of autonomous robot navigation in the wild.
One key limitation mentioned is the system's sensitivity to environmental changes, such as seasonal variations in vegetation. This could make it difficult to maintain accurate localization over long-term deployments. The researchers suggest further investigations into techniques like adaptive mapping to address this issue.
Additionally, the computational requirements of the system may be a concern for resource-constrained robotic platforms. The authors note that optimizations, such as the use of lightweight attention mechanisms, could help improve efficiency and enable real-time performance.
Overall, this study provides valuable insights into the practical challenges and considerations for deploying LiDAR-based place recognition in complex, unstructured environments. The findings can inform the development of more robust and reliable systems for autonomous forest exploration and mapping.
Conclusion
This paper presents a comprehensive evaluation of a LiDAR-based place recognition system in dense forest environments. By testing the system in real-world conditions, the researchers were able to identify both its strengths and limitations, which can guide future improvements to this technology.
The insights from this work are particularly relevant for the development of autonomous robots capable of navigating and mapping complex outdoor terrains, such as those found in forests. Continued advancements in this area could lead to more effective tools for environmental monitoring, forestry management, and other applications that require robust localization and exploration capabilities in challenging natural settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Evaluation and Deployment of LiDAR-based Place Recognition in Dense Forests
Haedam Oh, Nived Chebrolu, Matias Mattamala, Leonard Frei{ss}muth, Maurice Fallon
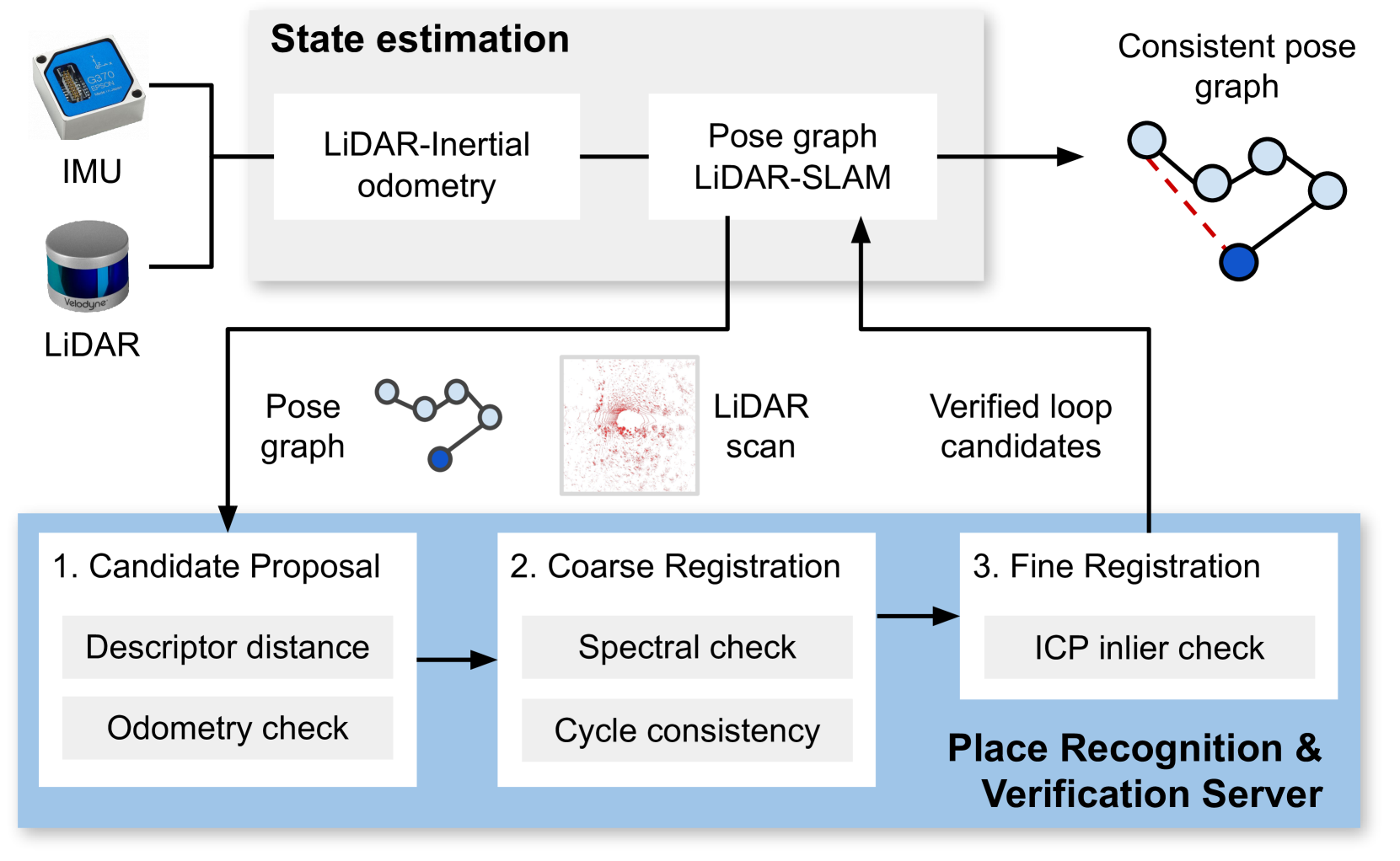
Many LiDAR place recognition systems have been developed and tested specifically for urban driving scenarios. Their performance in natural environments such as forests and woodlands have been studied less closely. In this paper, we analyzed the capabilities of four different LiDAR place recognition systems, both handcrafted and learning-based methods, using LiDAR data collected with a handheld device and legged robot within dense forest environments. In particular, we focused on evaluating localization where there is significant translational and orientation difference between corresponding LiDAR scan pairs. This is particularly important for forest survey systems where the sensor or robot does not follow a defined road or path. Extending our analysis we then incorporated the best performing approach, Logg3dNet, into a full 6-DoF pose estimation system -- introducing several verification layers for precise registration. We demonstrated the performance of our methods in three operational modes: online SLAM, offline multi-mission SLAM map merging, and relocalization into a prior map. We evaluated these modes using data captured in forests from three different countries, achieving 80% of correct loop closures candidates with baseline distances up to 5m, and 60% up to 10m. Video at: https://youtu.be/86l-oxjwmjY
Read more9/2/2024

0
Matched Filtering based LiDAR Place Recognition for Urban and Natural Environments
Therese Joseph, Tobias Fischer, Michael Milford
Place recognition is an important task within autonomous navigation, involving the re-identification of previously visited locations from an initial traverse. Unlike visual place recognition (VPR), LiDAR place recognition (LPR) is tolerant to changes in lighting, seasons, and textures, leading to high performance on benchmark datasets from structured urban environments. However, there is a growing need for methods that can operate in diverse environments with high performance and minimal training. In this paper, we propose a handcrafted matching strategy that performs roto-translation invariant place recognition and relative pose estimation for both urban and unstructured natural environments. Our approach constructs Birds Eye View (BEV) global descriptors and employs a two-stage search using matched filtering -- a signal processing technique for detecting known signals amidst noise. Extensive testing on the NCLT, Oxford Radar, and WildPlaces datasets consistently demonstrates state-of-the-art (SoTA) performance across place recognition and relative pose estimation metrics, with up to 15% higher recall than previous SoTA.
Read more9/9/2024
⚙️
0
Towards Long-term Robotics in the Wild
Stephen Hausler, Ethan Griffiths, Milad Ramezani, Peyman Moghadam
In this paper, we emphasise the critical importance of large-scale datasets for advancing field robotics capabilities, particularly in natural environments. While numerous datasets exist for urban and suburban settings, those tailored to natural environments are scarce. Our recent benchmarks WildPlaces and WildScenes address this gap by providing synchronised image, lidar, semantic and accurate 6-DoF pose information in forest-type environments. We highlight the multi-modal nature of this dataset and discuss and demonstrate its utility in various downstream tasks, such as place recognition and 2D and 3D semantic segmentation tasks.
Read more4/30/2024
0
Autonomous Forest Inventory with Legged Robots: System Design and Field Deployment
Mat'ias Mattamala, Nived Chebrolu, Benoit Casseau, Leonard Frei{ss}muth, Jonas Frey, Turcan Tuna, Marco Hutter, Maurice Fallon
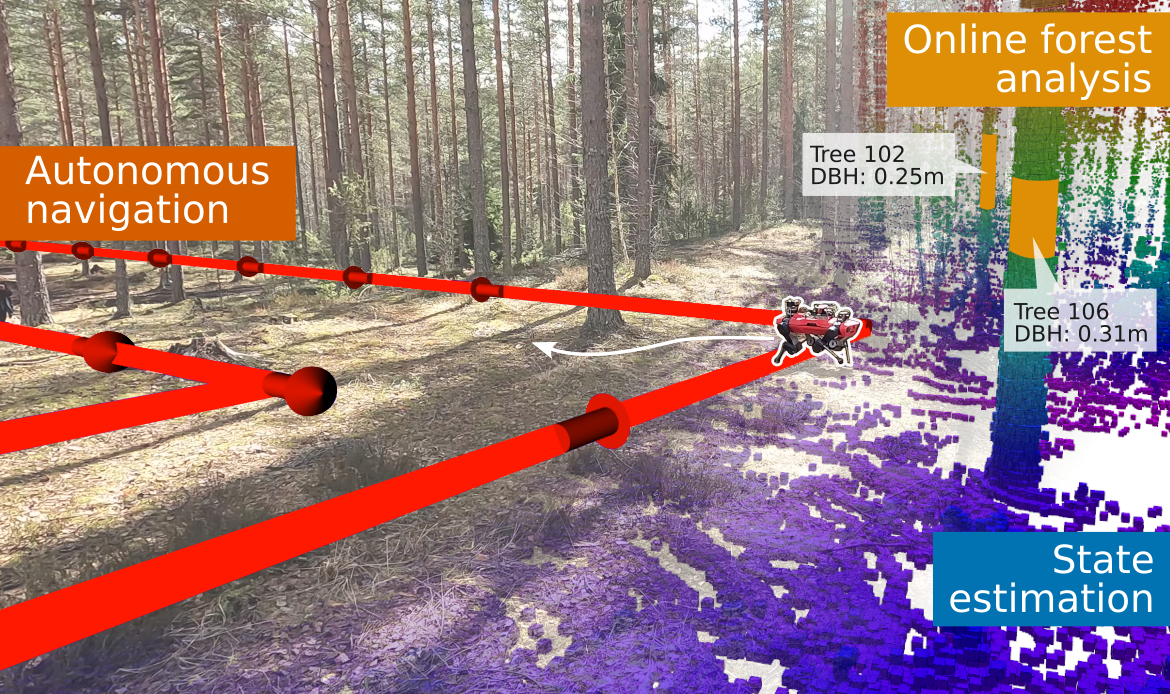
We present a solution for autonomous forest inventory with a legged robotic platform. Compared to their wheeled and aerial counterparts, legged platforms offer an attractive balance of endurance and low soil impact for forest applications. In this paper, we present the complete system architecture of our forest inventory solution which includes state estimation, navigation, mission planning, and real-time tree segmentation and trait estimation. We present preliminary results for three campaigns in forests in Finland and the UK and summarize the main outcomes, lessons, and challenges. Our UK experiment at the Forest of Dean with the ANYmal D legged platform, achieved an autonomous survey of a 0.96 hectare plot in 20 min, identifying over 100 trees with typical DBH accuracy of 2 cm.
Read more4/23/2024