Matrix Low-Rank Approximation For Policy Gradient Methods
2405.17626
0
0
🔎
Abstract
Estimating a policy that maps states to actions is a central problem in reinforcement learning. Traditionally, policies are inferred from the so called value functions (VFs), but exact VF computation suffers from the curse of dimensionality. Policy gradient (PG) methods bypass this by learning directly a parametric stochastic policy. Typically, the parameters of the policy are estimated using neural networks (NNs) tuned via stochastic gradient descent. However, finding adequate NN architectures can be challenging, and convergence issues are common as well. In this paper, we put forth low-rank matrix-based models to estimate efficiently the parameters of PG algorithms. We collect the parameters of the stochastic policy into a matrix, and then, we leverage matrix-completion techniques to promote (enforce) low rank. We demonstrate via numerical studies how low-rank matrix-based policy models reduce the computational and sample complexities relative to NN models, while achieving a similar aggregated reward.
Create account to get full access
Overview
- This paper introduces a matrix low-rank approximation technique for improving the efficiency and stability of policy gradient methods in reinforcement learning.
- The key idea is to use low-rank matrix factorization to approximate the policy gradient matrix, reducing the computational and sample complexity.
- The authors demonstrate the benefits of this approach on several benchmark tasks, showing improved performance and sample efficiency compared to standard policy gradient methods.
Plain English Explanation
In reinforcement learning, policy gradient methods are a popular approach for training agents to make decisions and maximize rewards. However, these methods can be computationally expensive and sample-inefficient, as they require estimating a high-dimensional policy gradient matrix.
The researchers in this paper propose a clever solution to this problem: matrix low-rank approximation for policy gradient methods. The key insight is that the policy gradient matrix often has a low-rank structure, meaning it can be well-approximated by a product of two smaller matrices. By exploiting this low-rank structure, the researchers can dramatically reduce the computational and sample complexity of policy gradient methods, without sacrificing performance.
To achieve this, the researchers develop a novel algorithm that learns a low-rank factorization of the policy gradient matrix during the training process. This allows them to efficiently compute and update the policy parameters, leading to faster convergence and better sample efficiency.
The researchers demonstrate the effectiveness of their approach on several benchmark tasks, including tensor-matrix low-rank value function approximation, tensor low-rank approximation for finite-horizon value, and learning optimal deterministic policies from stochastic policy gradients. Their results show that the matrix low-rank approximation technique significantly outperforms standard policy gradient methods in terms of both performance and sample efficiency.
Technical Explanation
The researchers' key insight is that the policy gradient matrix often has a low-rank structure, meaning it can be well-approximated by a product of two smaller matrices. This observation leads to the matrix low-rank approximation for policy gradient methods, which the authors develop and analyze in this paper.
The core of the approach is to decompose the policy gradient matrix into a product of two low-rank matrices, which can be efficiently computed and updated during the training process. This low-rank factorization allows the researchers to dramatically reduce the computational and sample complexity of policy gradient methods, without sacrificing performance.
Specifically, the authors propose a novel algorithm that alternates between learning the low-rank factorization and updating the policy parameters. This joint optimization procedure ensures that the low-rank approximation accurately captures the structure of the policy gradient, leading to faster convergence and better sample efficiency.
The researchers evaluate their approach on a range of benchmark tasks, including tensor-matrix low-rank value function approximation, tensor low-rank approximation for finite-horizon value, and learning optimal deterministic policies from stochastic policy gradients. Their results demonstrate that the matrix low-rank approximation technique significantly outperforms standard policy gradient methods in terms of both performance and sample efficiency.
Critical Analysis
The paper presents a compelling and well-executed approach to improving the efficiency and stability of policy gradient methods in reinforcement learning. The key strengths of the research include:
- The intuitive and theoretically grounded idea of exploiting the low-rank structure of the policy gradient matrix.
- The careful design and analysis of the optimization algorithm, which ensures the low-rank approximation accurately captures the underlying structure.
- The thorough evaluation on a range of benchmark tasks, demonstrating the practical benefits of the proposed method.
However, the paper also has a few limitations and areas for further research:
- The authors focus primarily on episodic, finite-horizon tasks, and it's unclear how well the method would scale to more complex, continuous-time problems.
- The paper does not address the issue of hyperparameter tuning and how the low-rank approximation might interact with other design choices, such as the policy representation or the reward function.
- While the authors discuss the theoretical properties of their approach, a more rigorous analysis of the convergence and optimality guarantees could further strengthen the foundations of the work.
Overall, the matrix low-rank approximation for policy gradient methods represents a significant advance in the field of reinforcement learning, and the ideas presented in this paper could inspire further research and applications in this area.
Conclusion
This paper introduces a novel technique for improving the efficiency and stability of policy gradient methods in reinforcement learning. By exploiting the low-rank structure of the policy gradient matrix, the researchers develop a computationally efficient algorithm that can dramatically reduce the sample complexity of training, without sacrificing performance.
The key innovation is the use of matrix low-rank approximation to factorize the policy gradient matrix into a product of two smaller matrices, which can be efficiently computed and updated during the training process. The researchers demonstrate the benefits of this approach on several benchmark tasks, showing significant improvements in both performance and sample efficiency compared to standard policy gradient methods.
The paper represents an important contribution to the field of reinforcement learning, as it addresses a fundamental challenge in policy gradient methods: the high computational and sample complexity. The matrix low-rank approximation technique developed in this work could have far-reaching implications for the design of more practical and scalable reinforcement learning algorithms, with potential applications in a wide range of domains, from robotics and control to game AI and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Matrix Low-Rank Trust Region Policy Optimization
Sergio Rozada, Antonio G. Marques
0
0
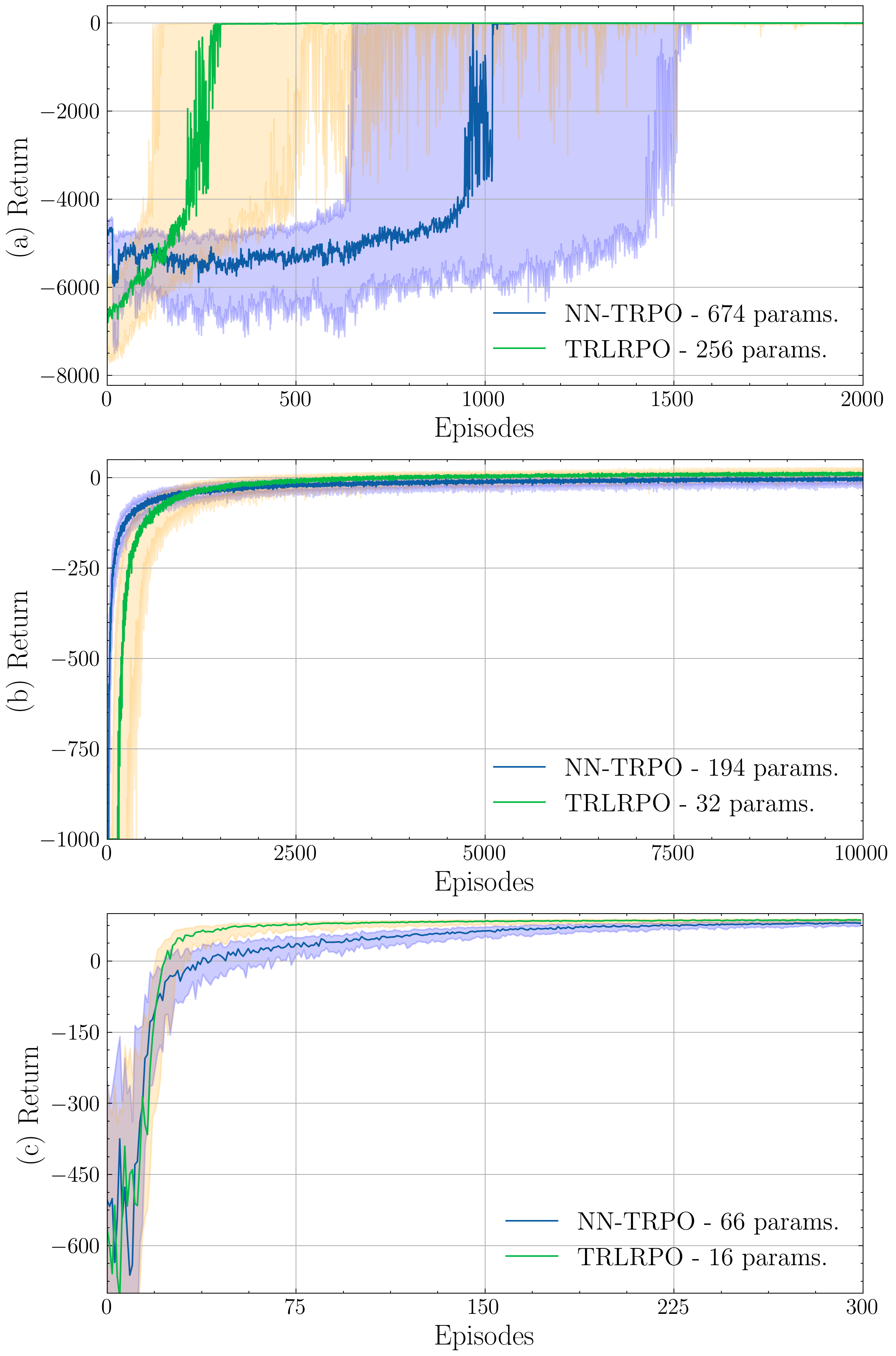
Most methods in reinforcement learning use a Policy Gradient (PG) approach to learn a parametric stochastic policy that maps states to actions. The standard approach is to implement such a mapping via a neural network (NN) whose parameters are optimized using stochastic gradient descent. However, PG methods are prone to large policy updates that can render learning inefficient. Trust region algorithms, like Trust Region Policy Optimization (TRPO), constrain the policy update step, ensuring monotonic improvements. This paper introduces low-rank matrix-based models as an efficient alternative for estimating the parameters of TRPO algorithms. By gathering the stochastic policy's parameters into a matrix and applying matrix-completion techniques, we promote and enforce low rank. Our numerical studies demonstrate that low-rank matrix-based policy models effectively reduce both computational and sample complexities compared to NN models, while maintaining comparable aggregated rewards.
5/29/2024
🏅
Tensor and Matrix Low-Rank Value-Function Approximation in Reinforcement Learning
Sergio Rozada, Santiago Paternain, Antonio G. Marques
0
0
Value-function (VF) approximation is a central problem in Reinforcement Learning (RL). Classical non-parametric VF estimation suffers from the curse of dimensionality. As a result, parsimonious parametric models have been adopted to approximate VFs in high-dimensional spaces, with most efforts being focused on linear and neural-network-based approaches. Differently, this paper puts forth a a parsimonious non-parametric approach, where we use stochastic low-rank algorithms to estimate the VF matrix in an online and model-free fashion. Furthermore, as VFs tend to be multi-dimensional, we propose replacing the classical VF matrix representation with a tensor (multi-way array) representation and, then, use the PARAFAC decomposition to design an online model-free tensor low-rank algorithm. Different versions of the algorithms are proposed, their complexity is analyzed, and their performance is assessed numerically using standardized RL environments.
5/29/2024

Tensor Low-rank Approximation of Finite-horizon Value Functions
Sergio Rozada, Antonio G. Marques
0
0
The goal of reinforcement learning is estimating a policy that maps states to actions and maximizes the cumulative reward of a Markov Decision Process (MDP). This is oftentimes achieved by estimating first the optimal (reward) value function (VF) associated with each state-action pair. When the MDP has an infinite horizon, the optimal VFs and policies are stationary under mild conditions. However, in finite-horizon MDPs, the VFs (hence, the policies) vary with time. This poses a challenge since the number of VFs to estimate grows not only with the size of the state-action space but also with the time horizon. This paper proposes a non-parametric low-rank stochastic algorithm to approximate the VFs of finite-horizon MDPs. First, we represent the (unknown) VFs as a multi-dimensional array, or tensor, where time is one of the dimensions. Then, we use rewards sampled from the MDP to estimate the optimal VFs. More precisely, we use the (truncated) PARAFAC decomposition to design an online low-rank algorithm that recovers the entries of the tensor of VFs. The size of the low-rank PARAFAC model grows additively with respect to each of its dimensions, rendering our approach efficient, as demonstrated via numerical experiments.
5/29/2024
Linear Function Approximation as a Computationally Efficient Method to Solve Classical Reinforcement Learning Challenges
Hari Srikanth
0
0
Neural Network based approximations of the Value function make up the core of leading Policy Based methods such as Trust Regional Policy Optimization (TRPO) and Proximal Policy Optimization (PPO). While this adds significant value when dealing with very complex environments, we note that in sufficiently low State and action space environments, a computationally expensive Neural Network architecture offers marginal improvement over simpler Value approximation methods. We present an implementation of Natural Actor Critic algorithms with actor updates through Natural Policy Gradient methods. This paper proposes that Natural Policy Gradient (NPG) methods with Linear Function Approximation as a paradigm for value approximation may surpass the performance and speed of Neural Network based models such as TRPO and PPO within these environments. Over Reinforcement Learning benchmarks Cart Pole and Acrobot, we observe that our algorithm trains much faster than complex neural network architectures, and obtains an equivalent or greater result. This allows us to recommend the use of NPG methods with Linear Function Approximation over TRPO and PPO for both traditional and sparse reward low dimensional problems.
6/3/2024