Metasensor: a proposal for sensor evolution in robotics

0
Sign in to get full access
Overview
- Proposes a novel "Metasensor" model for sensor evolution in robotics
- Introduces a "control-by-interpretation" approach to sensor development
- Explores opportunities for distributed AI and robot-as-sensor systems
- Discusses potential for sensor-imitation of third-person expert behaviors
- Highlights a robot detection system design with a sensor network
Plain English Explanation
The paper presents a new concept called "Metasensor" that aims to advance sensor technology in robotics. The key idea is to shift from a traditional sensor design approach to a "control-by-interpretation" model, where sensors are not just passive data collectors but active interpreters of their environment.
This shift enables new possibilities, such as distributed artificial intelligence as a means to achieve sensor evolution and the formation of robot-as-sensor networks. Rather than relying on pre-programmed responses, sensors could imitate the behaviors of third-person experts to adapt and evolve over time.
The paper also explores a specific application of this Metasensor concept - a robot detection system that utilizes a distributed sensor network to identify and track robots in a given environment. This system demonstrates the potential for Metasensors to enable advanced perception and decision-making capabilities in robotic systems.
Technical Explanation
The "Metasensor" model proposed in the paper challenges the traditional approach to sensor design in robotics. Instead of sensors as passive data collectors, the authors introduce a "control-by-interpretation" framework where sensors actively interpret their environment and adapt their behaviors accordingly.
This shift enables new possibilities, such as the use of distributed artificial intelligence to drive sensor evolution. By allowing sensors to learn and evolve through interactions with their environment, the authors envision the formation of robot-as-sensor networks that can collaborate and share information.
The paper also explores the concept of sensor-imitation of third-person expert behaviors, where sensors can learn from and mimic the actions of human or robotic experts to improve their own performance.
As a practical application, the authors present a robot detection system that utilizes a distributed sensor network to identify and track robots in a given environment. This system demonstrates how the Metasensor model can enable advanced perception and decision-making capabilities in robotic systems.
Critical Analysis
The Metasensor model proposed in this paper presents an intriguing shift in sensor design for robotics, but it also raises several questions and potential limitations.
While the authors highlight the benefits of sensor evolution and distributed intelligence, the practical implementation of such a system may face challenges. Ensuring the reliability, security, and scalability of a Metasensor network could be a significant hurdle, especially when it comes to safety-critical applications.
Additionally, the paper does not delve deeply into the ethical considerations of this approach, such as the potential for bias or unintended consequences in sensor-driven decision-making. As Metasensors become more autonomous, it will be crucial to address these concerns and ensure alignment with human values.
Further research is needed to validate the Metasensor model's performance and feasibility in real-world scenarios, beyond the proof-of-concept robot detection system described in the paper. Exploring the integration of this approach with other emerging technologies, such as metarobotics, could also yield valuable insights.
Conclusion
The Metasensor model proposed in this paper represents a significant shift in sensor design for robotics, moving away from passive data collection towards active interpretation and adaptation. This approach opens up new opportunities for distributed artificial intelligence, robot-as-sensor networks, and the imitation of third-person expert behaviors.
While the potential benefits are significant, the paper also highlights the need for further research to address practical implementation challenges and ethical considerations. As Metasensors become more autonomous, it will be crucial to ensure their reliability, security, and alignment with human values.
Overall, the Metasensor model represents an exciting step forward in the evolution of sensor technology, with the potential to transform the way robotic systems perceive and interact with their environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Metasensor: a proposal for sensor evolution in robotics
Michele Braccini
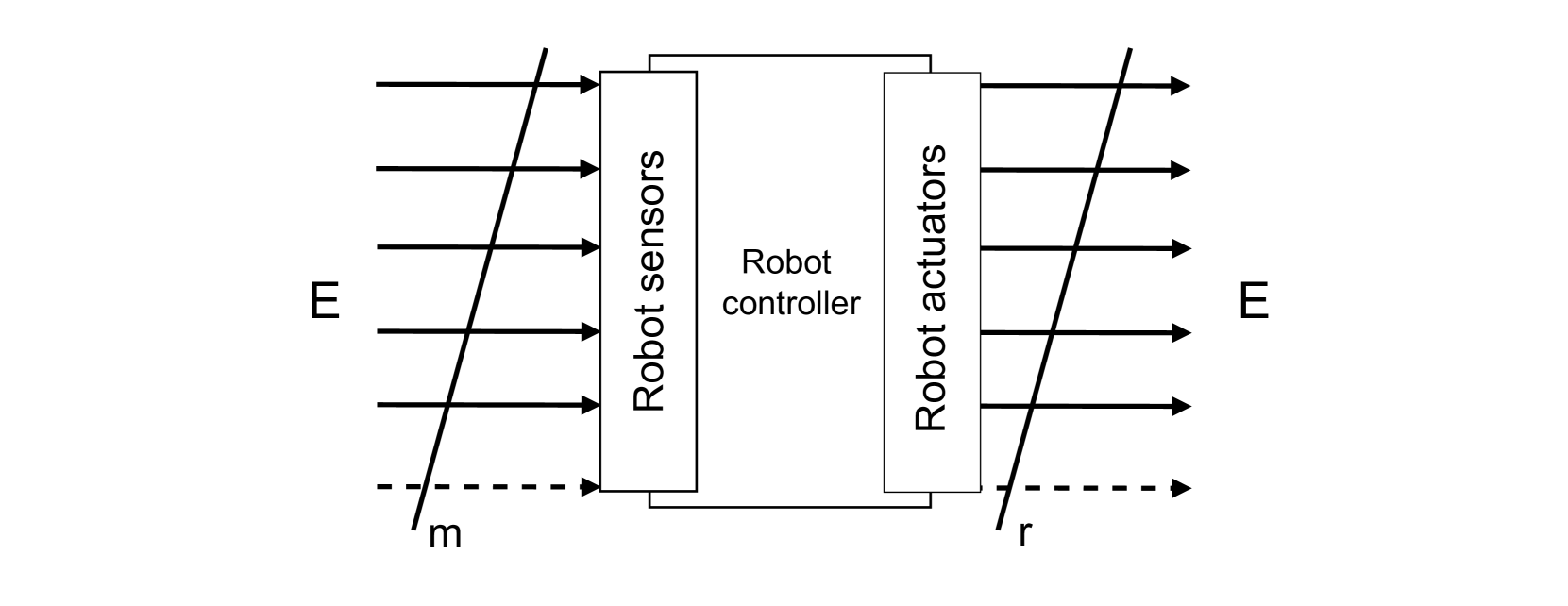
Sensors play a fundamental role in achieving the complex behaviors typically found in biological organisms. However, their potential role in the design of artificial agents is often overlooked. This often results in the design of robots that are poorly adapted to the environment, compared to their biological counterparts. This paper proposes a formalization of a novel architectural component, called a metasensor, which enables a process of sensor evolution reminiscent of what occurs in living organisms. Even in online scenarios, the metasensor layer searches for the optimal interpretation of its input signals and then feeds them to the robotic agent to accomplish the assigned task.
Read more6/13/2024

0
Metarobotics for Industry and Society: Vision, Technologies, and Opportunities
Eric Guiffo Kaigom
Metarobotics aims to combine next generation wireless communication, multi-sense immersion, and collective intelligence to provide a pervasive, itinerant, and non-invasive access and interaction with distant robotized applications. Industry and society are expected to benefit from these functionalities. For instance, robot programmers will no longer travel worldwide to plan and test robot motions, even collaboratively. Instead, they will have a personalized access to robots and their environments from anywhere, thus spending more time with family and friends. Students enrolled in robotics courses will be taught under authentic industrial conditions in real-time. This paper describes objectives of Metarobotics in society, industry, and in-between. It identifies and surveys technologies likely to enable their completion and provides an architecture to put forward the interplay of key components of Metarobotics. Potentials for self-determination, self-efficacy, and work-life-flexibility in robotics-related applications in Society 5.0, Industry 4.0, and Industry 5.0 are outlined.
Read more4/9/2024

0
Robot-As-A-Sensor: Forming a Sensing Network with Robots for Underground Mining Missions
Xiaoyu Ai, Chengpei Xu, Binghao Li, Feng Xia
Nowadays, robots are deployed as mobile platforms equipped with sensing, communication and computing capabilities, especially in the mining industry, where they perform tasks in hazardous and repetitive environments. Despite their potential, individual robots face significant limitations when completing complex tasks that require the collaboration of multiple robots. This collaboration requires a robust wireless network to ensure operational efficiency and reliability. This paper introduces the concept of Robot-As-A-Sensor (RAAS), which treats the robots as mobile sensors within structures similar to Wireless Sensor Networks (WSNs). We later identify specific challenges in integrating RAAS technology and propose technological advancements to address these challenges. Finally, we provide an outlook about the technologies that can contribute to realising RAAS, suggesting that this approach could catalyse a shift towards safer, more intelligent, and sustainable industry practices. We believe that this innovative RAAS framework could significantly transform industries requiring advanced technological integration.
Read more5/2/2024
📶
0
Distributed Artificial Intelligence as a Means to Achieve Self-X-Functions for Increasing Resilience: the First Steps
Oxana Shamilyan, Ievgen Kabin, Zoya Dyka, Peter Langendoerfer
Using sensors as a means to achieve self-awareness and artificial intelligence for decision-making, may be a way to make complex systems self-adaptive, autonomous and resilient. Investigating the combination of distributed artificial intelligence methods and bio-inspired robotics can provide results that will be helpful for implementing autonomy of such robots and other complex systems. In this paper, we describe Distributed Artificial Intelligence application area, the most common examples of continuum robots and provide a description of our first steps towards implementing distributed control.
Read more4/10/2024