Robot-As-A-Sensor: Forming a Sensing Network with Robots for Underground Mining Missions

0

Sign in to get full access
Overview
- This paper explores the concept of using robots as mobile sensors to form a sensor network for underground mining missions.
- The goal is to improve situational awareness and data collection in challenging underground environments by leveraging the mobility and sensing capabilities of robots.
- The proposed approach involves deploying a team of robots that can collaboratively navigate, explore, and gather data in the underground mine.
Plain English Explanation
The researchers in this paper had an interesting idea: using robots as mobile sensors to create a sensor network for underground mining operations. The motivation is that underground mines can be very difficult and dangerous environments to work in, so having a team of robots that can move around and gather data could really improve our understanding of what's going on underground.
The basic concept is to have a group of robots that can navigate through the mine, using their various sensors [<a href="https://aimodels.fyi/papers/arxiv/robotic-deployment-construction-sites-considerations-safety-productivity">sensors</a>] to collect all kinds of important information, like air quality, structural integrity, and the location of valuable resources. By having multiple robots working together [<a href="https://aimodels.fyi/papers/arxiv/distributed-artificial-intelligence-as-means-to-achieve">distributed AI</a>], they can cover more ground and get a much more comprehensive view of the underground environment.
This could be really useful for mining companies, as it would allow them to better monitor conditions, plan their operations more effectively, and hopefully improve both safety and productivity. It's an innovative way to use robotics technology [<a href="https://aimodels.fyi/papers/arxiv/multi-robot-target-tracking-sensing-communication-danger">multi-robot systems</a>] to solve some of the unique challenges of underground mining.
Technical Explanation
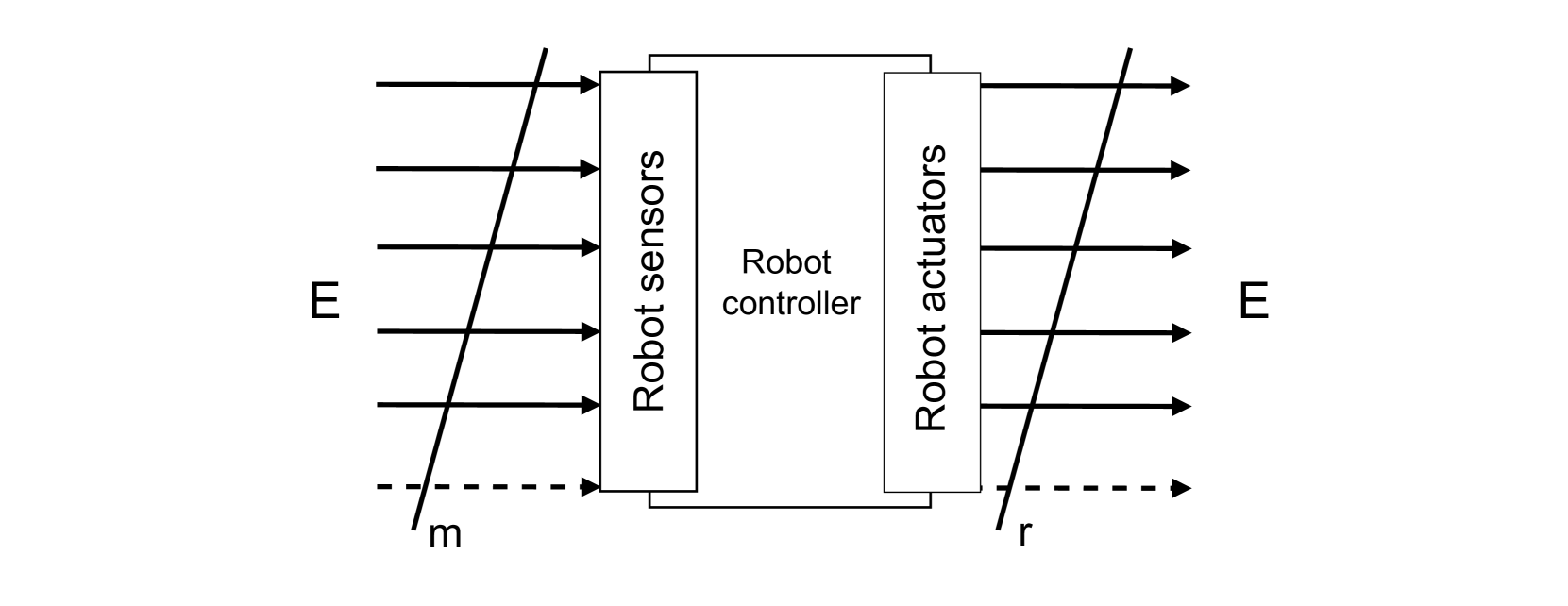
The researchers propose a "Robot-As-A-Sensor" approach, where a team of mobile robots equipped with various sensors are deployed to form a sensor network in underground mining environments [<a href="https://aimodels.fyi/papers/arxiv/teleaware-robot-designing-awareness-augmented-telepresence-robot">robot-as-a-sensor</a>].
The key elements of the system include:
- A fleet of heterogeneous robots with different sensing capabilities (e.g., gas sensors, cameras, LIDAR) that can navigate through the mine autonomously.
- A communication infrastructure that allows the robots to share data and coordinate their exploration and data collection efforts.
- A central control system that manages the robot team, processes the sensor data, and provides situational awareness to human operators.
The researchers describe a multi-stage deployment process where the robots first map the environment, then adaptively navigate and explore to gather relevant data. The sensor data is fused and analyzed to provide a comprehensive view of the underground conditions.
Critical Analysis
The proposed "Robot-As-A-Sensor" approach seems promising for improving situational awareness and data collection in challenging underground mining environments. The use of a team of mobile robots with diverse sensing capabilities could potentially provide much richer information than stationary sensor networks or human-operated inspections.
However, the paper does not thoroughly address some of the practical challenges of deploying and maintaining such a robot system in an underground mine. Issues like robot reliability, communication reliability, and energy/power management in the harsh underground conditions are not covered in depth.
Additionally, the paper does not discuss the computational and data processing requirements for handling the large volume of sensor data generated by the robot team. Efficient algorithms for data fusion, anomaly detection, and decision support will be crucial for translating the raw sensor data into actionable insights for mine operators.
Further research is needed to validate the feasibility and scalability of the proposed approach, as well as to explore potential ethical and safety concerns [<a href="https://aimodels.fyi/papers/arxiv/automated-real-time-inspection-indoor-outdoor-3d">safety considerations</a>] in using autonomous robots in underground mining operations.
Conclusion
This paper presents an innovative concept of using a team of mobile robots equipped with various sensors to form a sensing network for underground mining missions. The goal is to improve situational awareness and data collection in these challenging environments, which could lead to enhanced safety, productivity, and resource management for mining operations.
While the proposed "Robot-As-A-Sensor" approach shows promise, the paper highlights the need for further research to address practical deployment challenges and ensure the reliable, scalable, and ethical use of such robot-based sensing systems in underground mining applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robot-As-A-Sensor: Forming a Sensing Network with Robots for Underground Mining Missions
Xiaoyu Ai, Chengpei Xu, Binghao Li, Feng Xia
Nowadays, robots are deployed as mobile platforms equipped with sensing, communication and computing capabilities, especially in the mining industry, where they perform tasks in hazardous and repetitive environments. Despite their potential, individual robots face significant limitations when completing complex tasks that require the collaboration of multiple robots. This collaboration requires a robust wireless network to ensure operational efficiency and reliability. This paper introduces the concept of Robot-As-A-Sensor (RAAS), which treats the robots as mobile sensors within structures similar to Wireless Sensor Networks (WSNs). We later identify specific challenges in integrating RAAS technology and propose technological advancements to address these challenges. Finally, we provide an outlook about the technologies that can contribute to realising RAAS, suggesting that this approach could catalyse a shift towards safer, more intelligent, and sustainable industry practices. We believe that this innovative RAAS framework could significantly transform industries requiring advanced technological integration.
Read more5/2/2024

0
Semi-Autonomous Mobile Search and Rescue Robot for Radiation Disaster Scenarios
Simon Schwaiger, Lucas Muster, Georg Novotny, Michael Schebek, Wilfried Wober, Stefan Thalhammer, Christoph Bohm
This paper describes a novel semi-autonomous mobile robot system designed to assist search and rescue (SAR) first responders in disaster scenarios. While robots offer significant potential in SAR missions, current solutions are limited in their ability to handle a diverse range of tasks. This gap is addressed by presenting a system capable of (1) autonomous navigation and mapping, allowing the robot to autonomously explore and map areas affected by catastrophic events, (2) radiation mapping, enabling the system to triangulate a radiation map from discrete radiation measurements to aid in identifying hazardous areas, (3) semi-autonomous substance sampling, allowing the robot to collect samples of suspicious substances and analyze them onboard with immediate classification, and (4) valve manipulation, enabling teleoperated closing of valves that control hazardous material flow. This semi-autonomous approach balances human control over critical tasks like substance sampling with efficient robot navigation in low-risk areas. The system is evaluated during three trials that simulate possible disaster scenarios, two of which have been recorded during the European Robotics Hackathon (EnRicH). Furthermore, we provide recorded sensor data as well as the implemented software system as supplemental material through a GitHub repository: https://github.com/TW-Robotics/search-and-rescue-robot-IROS2024.
Read more6/21/2024
0
Metasensor: a proposal for sensor evolution in robotics
Michele Braccini
Sensors play a fundamental role in achieving the complex behaviors typically found in biological organisms. However, their potential role in the design of artificial agents is often overlooked. This often results in the design of robots that are poorly adapted to the environment, compared to their biological counterparts. This paper proposes a formalization of a novel architectural component, called a metasensor, which enables a process of sensor evolution reminiscent of what occurs in living organisms. Even in online scenarios, the metasensor layer searches for the optimal interpretation of its input signals and then feeds them to the robotic agent to accomplish the assigned task.
Read more6/13/2024
🔍
0
Joint Robotic Aerial Base Station Deployment and Wireless Backhauling in 6G Multi-hop Networks
Wen Shang, Yuan Liao, Vasilis Friderikos, Halim Yanikomeroglu
Due to their ability to anchor into tall urban landforms, such as lampposts or street lights, robotic aerial base stations (RABSs) can create a hyper-flexible wireless multi-hop heterogeneous network to meet the forthcoming green, densified, and dynamic network deployment to support, inter alia, high data rates. In this work, we propose a network infrastructure that can concurrently support the wireless backhaul link capacity and access link traffic demand in the millimeter-wave (mmWave) frequency band. The RABSs grasping locations, resource blocks (RBs) assignment, and route flow control are simultaneously optimized to maximize the served traffic demands. Robotic base stations capitalize on the fact that traffic distribution varies considerably across both time and space within a given geographical area. Hence, they are able to relocate to suitable locations, i.e., 'follow' the traffic demand as it unfolds to increase the overall network efficiency. To tackle the curse of dimensionality of the proposed mixed-integer linear problem, we propose a greedy algorithm to obtain a competitive solution with low computational complexity. Compared to baseline models, which are heterogeneous networks with randomly deployed fixed small cells and pre-allocated RBs for wireless access and backhaul links, a wide set of numerical investigations reveals that robotic base stations could improve the served traffic demand. Specifically, the proposed mode serves at most 65% more traffic demand compared to an equal number of deployed fixed small cells.
Read more5/14/2024