MINER-RRT*: A Hierarchical and Fast Trajectory Planning Framework in 3D Cluttered Environments
2406.00706
0
0
Abstract
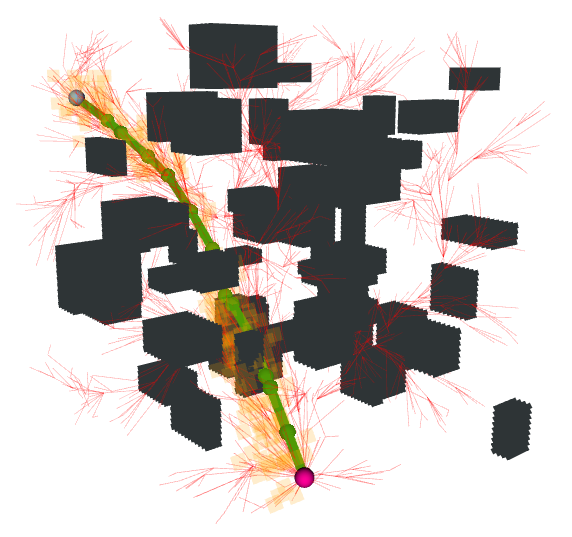
Trajectory planning for quadrotors in cluttered environments has been challenging in recent years. While many trajectory planning frameworks have been successful, there still exists potential for improvements, particularly in enhancing the speed of generating efficient trajectories. In this paper, we present a novel hierarchical trajectory planning framework to reduce computational time and memory usage called MINER-RRT*, which consists of two main components. First, we propose a sampling-based path planning method boosted by neural networks, where the predicted heuristic region accelerates the convergence of rapidly-exploring random trees. Second, we utilize the optimal conditions derived from the quadrotor's differential flatness properties to construct polynomial trajectories that minimize control effort in multiple stages. Extensive simulation and real-world experimental results demonstrate that, compared to several state-of-the-art (SOTA) approaches, our method can generate high-quality trajectories with better performance in 3D cluttered environments.
Create account to get full access
Overview
- This paper presents MINER-RRT*, a hierarchical and fast trajectory planning framework for 3D cluttered environments.
- The framework combines a global planner based on the Rapidly-exploring Random Tree (RRT*) algorithm with a local planner that optimizes the generated trajectories.
- The key innovations include a novel local planner that leverages a learned motion model, as well as a hierarchical planning approach that improves efficiency and scalability.
Plain English Explanation
The paper describes a new system for planning robot trajectories in complex 3D environments with many obstacles. The main idea is to use a two-level approach:
-
A global planner that explores the environment using the Rapidly-exploring Random Tree (RRT*) algorithm. This algorithm quickly finds a rough path from the robot's starting point to the goal.
-
A local planner that takes this global path and optimizes it, adjusting the trajectory to avoid obstacles and make it smoother. This local planner uses a "learned motion model" - it has been trained on many example robot motions, so it knows how the robot can move efficiently.
By combining these global and local planning steps, the system can find high-quality trajectories through cluttered 3D spaces quickly and efficiently. This could be useful for applications like autonomous planetary exploration or navigating rough terrain with aerial robots.
Technical Explanation
The MINER-RRT* framework consists of a global planner and a local planner. The global planner uses the RRT* algorithm to quickly explore the 3D environment and find a feasible path from the robot's starting point to the goal. RRT* is an efficient variant of the Rapidly-exploring Random Tree (RRT) algorithm that can find optimal paths.
The local planner then takes this global path and optimizes it further. It uses a learned motion model to generate smooth, obstacle-avoiding trajectories. This motion model is trained offline on many example robot motions, allowing the local planner to efficiently navigate the 3D environment.
The key innovations in this work are:
- The hierarchical planning approach, which separates global and local planning to improve efficiency and scalability.
- The use of a learned motion model in the local planner, which enables fast trajectory optimization.
- Extensive evaluation of the MINER-RRT* framework in simulation and comparison to baseline methods, demonstrating significant improvements in planning time and trajectory quality.
Critical Analysis
The paper provides a thorough evaluation of the MINER-RRT* framework, demonstrating its advantages over other planning approaches. However, the authors acknowledge some limitations:
- The framework has only been evaluated in simulation, and its performance in real-world scenarios may differ.
- The learned motion model is specific to the robot platform used in the experiments, and may need to be retrained for different robot types.
- The global planner, while efficient, may still struggle in highly cluttered environments with many obstacles.
Further research could explore ways to make the framework more adaptable to different environments and robot platforms, as well as investigate techniques to improve the global planning step in complex scenarios. Additionally, real-world experiments would be valuable to validate the framework's practical performance.
Conclusion
The MINER-RRT* framework represents a promising approach for fast and efficient trajectory planning in 3D cluttered environments. By combining a global planner based on the RRT* algorithm with a local planner that leverages a learned motion model, the system can generate high-quality trajectories quickly. This could have significant applications in areas such as autonomous aerial robotics and planetary exploration, where the ability to navigate complex 3D spaces efficiently is crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
DREAM: Decentralized Real-time Asynchronous Probabilistic Trajectory Planning for Collision-free Multi-Robot Navigation in Cluttered Environments
Bask{i}n c{S}enbac{s}lar, Gaurav S. Sukhatme
0
0
Collision-free navigation in cluttered environments with static and dynamic obstacles is essential for many multi-robot tasks. Dynamic obstacles may also be interactive, i.e., their behavior varies based on the behavior of other entities. We propose a novel representation for interactive behavior of dynamic obstacles and a decentralized real-time multi-robot trajectory planning algorithm allowing inter-robot collision avoidance as well as static and dynamic obstacle avoidance. Our planner simulates the behavior of dynamic obstacles, accounting for interactivity. We account for the perception inaccuracy of static and prediction inaccuracy of dynamic obstacles. We handle asynchronous planning between teammates and message delays, drops, and re-orderings. We evaluate our algorithm in simulations using 25400 random cases and compare it against three state-of-the-art baselines using 2100 random cases. Our algorithm achieves up to 1.68x success rate using as low as 0.28x time in single-robot, and up to 2.15x success rate using as low as 0.36x time in multi-robot cases compared to the best baseline. We implement our planner on real quadrotors to show its real-world applicability.
5/21/2024
A Comparative Study of Rapidly-exploring Random Tree Algorithms Applied to Ship Trajectory Planning and Behavior Generation
Trym Tengesdal, Tom Arne Pedersen, Tor Arne Johansen
0
0
Rapidly Exploring Random Tree (RRT) algorithms, notably used for nonholonomic vehicle navigation in complex environments, are often not thoroughly evaluated for their specific challenges. This paper presents a first such comparison study of the variants Potential-Quick RRT* (PQ-RRT*), Informed RRT* (IRRT*), RRT*, and RRT, in maritime single-query nonholonomic motion planning. Additionally, the practicalities of using these algorithms in maritime environments are discussed and outlined. We also contend that these algorithms are beneficial not only for trajectory planning in Collision Avoidance Systems (CAS) but also for CAS verification when used as vessel behavior generators. Optimal RRT variants tend to produce more distance-optimal paths but require more computational time due to complex tree wiring and nearest neighbor searches. Our findings, supported by Welch`s t-test at a significance level of Alpha = 0.05, indicate that PQ-RRT* slightly outperform IRRT* and RRT* in achieving shorter trajectory length but at the expense of higher tuning complexity and longer run-times. Based on the results, we argue that these RRT algorithms are better suited for smaller-scale problems or environments with low obstacle congestion ratio. This is attributed to the curse of dimensionality, and trade-off with available memory and computational resources.
4/19/2024

Three-Dimensional Path Planning: Navigating through Rough Mereology
Aleksandra Szpakowska, Piotr Artiemjew
0
0
In this paper, we present an innovative technique for the path planning of flying robots in a 3D environment in Rough Mereology terms. The main goal was to construct the algorithm that would generate the mereological potential fields in 3-dimensional space. To avoid falling into the local minimum, we assist with a weighted Euclidean distance. Moreover, a searching path from the start point to the target, with respect to avoiding the obstacles was applied. The environment was created by connecting two cameras working in real-time. To determine the gate and elements of the world inside the map was responsible the Python Library OpenCV [1] which recognized shapes and colors. The main purpose of this paper is to apply the given results to drones.
5/16/2024
🧪
A Novel Methodology for Autonomous Planetary Exploration Using Multi-Robot Teams
Sarah Swinton, Jan-Hendrik Ewers, Euan McGookin, David Anderson, Douglas Thomson
0
0
One of the fundamental limiting factors in planetary exploration is the autonomous capabilities of planetary exploration rovers. This study proposes a novel methodology for trustworthy autonomous multi-robot teams which incorporates data from multiple sources (HiRISE orbiter imaging, probability distribution maps, and on-board rover sensors) to find efficient exploration routes in Jezero crater. A map is generated, consisting of a 3D terrain model, traversability analysis, and probability distribution map of points of scientific interest. A three-stage mission planner generates an efficient route, which maximises the accumulated probability of identifying points of interest. A 4D RRT* algorithm is used to determine smooth, flat paths, and prioritised planning is used to coordinate a safe set of paths. The above methodology is shown to coordinate safe and efficient rover paths, which ensure the rovers remain within their nominal pitch and roll limits throughout operation.
5/22/2024