A Comparative Study of Rapidly-exploring Random Tree Algorithms Applied to Ship Trajectory Planning and Behavior Generation
2403.01194
0
0
Abstract
Rapidly Exploring Random Tree (RRT) algorithms, notably used for nonholonomic vehicle navigation in complex environments, are often not thoroughly evaluated for their specific challenges. This paper presents a first such comparison study of the variants Potential-Quick RRT* (PQ-RRT*), Informed RRT* (IRRT*), RRT*, and RRT, in maritime single-query nonholonomic motion planning. Additionally, the practicalities of using these algorithms in maritime environments are discussed and outlined. We also contend that these algorithms are beneficial not only for trajectory planning in Collision Avoidance Systems (CAS) but also for CAS verification when used as vessel behavior generators. Optimal RRT variants tend to produce more distance-optimal paths but require more computational time due to complex tree wiring and nearest neighbor searches. Our findings, supported by Welch`s t-test at a significance level of Alpha = 0.05, indicate that PQ-RRT* slightly outperform IRRT* and RRT* in achieving shorter trajectory length but at the expense of higher tuning complexity and longer run-times. Based on the results, we argue that these RRT algorithms are better suited for smaller-scale problems or environments with low obstacle congestion ratio. This is attributed to the curse of dimensionality, and trade-off with available memory and computational resources.
Create account to get full access
Overview
- This paper presents a comparative study of Rapidly-exploring Random Tree (RRT) algorithms for ship trajectory planning and behavior generation.
- RRT algorithms are a type of motion planning algorithm that can efficiently explore high-dimensional spaces and find feasible paths.
- The authors evaluate and compare the performance of different RRT variants, including Tube-RRT, Safe Interval RRT, and Adaptive Hybrid Local-Global Sampling, in the context of maritime navigation.
Plain English Explanation
The paper focuses on a type of algorithm called Rapidly-exploring Random Tree (RRT), which is used for planning the movement of objects, like ships, through complex environments. RRT algorithms work by randomly exploring the space and gradually building a "tree" of possible paths. The authors of this paper tested different variations of the RRT algorithm to see how well they could plan the trajectories, or paths, of ships.
They looked at things like how quickly the algorithms could find a good path, how well the paths avoided obstacles, and how smooth the paths were. The goal was to find an RRT algorithm that could efficiently and effectively plan the movement of ships in real-world maritime environments, which can be quite complex with many obstacles and constraints to consider.
The authors compared the performance of several different RRT variants, including Tube-RRT, Safe Interval RRT, and Adaptive Hybrid Local-Global Sampling. They ran simulations and experiments to see how each algorithm handled different scenarios, such as avoiding collisions, navigating around islands, and staying within designated channels.
The goal of this research is to develop better algorithms for planning the movement of ships, which could have important applications in areas like maritime transportation, naval operations, and autonomous ship navigation.
Technical Explanation
The paper evaluates and compares the performance of several Rapidly-exploring Random Tree (RRT) variants for ship trajectory planning and behavior generation. RRT algorithms are a widely used approach for motion planning in high-dimensional spaces, as they can efficiently explore the search space and find feasible paths.
The authors consider three RRT variants in their study:
- Tube-RRT: This algorithm focuses on finding homotopically distinct paths, which can be useful for planning the trajectories of a swarm of vehicles.
- Safe Interval RRT: This approach incorporates safety constraints to generate collision-free paths for multiple robots operating in the same environment.
- Adaptive Hybrid Local-Global Sampling: This algorithm combines local and global sampling strategies to achieve fast, informed exploration of the search space.
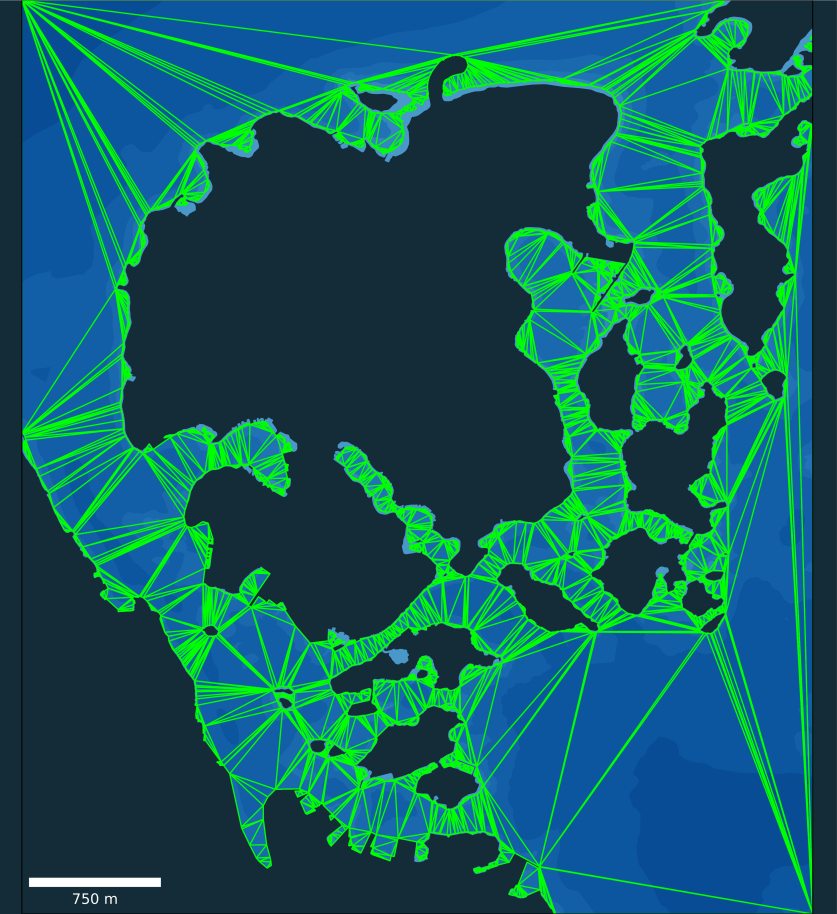
The authors evaluate these RRT variants in the context of maritime navigation, where ships must navigate through complex environments with obstacles, such as islands, coasts, and designated channels. They design a simulation environment to test the performance of the algorithms on various scenarios, including collision avoidance, path smoothness, and navigation through confined waterways.
The experiments aim to assess the effectiveness, efficiency, and robustness of the RRT algorithms in planning feasible and safe ship trajectories. The authors analyze metrics such as path length, path smoothness, computation time, and the ability to avoid obstacles and satisfy maritime constraints.
The results of the study provide insights into the strengths and weaknesses of the different RRT algorithms for ship trajectory planning and behavior generation. This information can help researchers and practitioners select the most appropriate RRT variant for their specific maritime navigation applications.
Critical Analysis
The paper provides a comprehensive comparative analysis of several RRT algorithms for ship trajectory planning, which is a crucial task in maritime navigation. The authors have carefully designed their experiments to evaluate the algorithms' performance under various scenarios, considering important factors such as collision avoidance, path smoothness, and adherence to maritime constraints.
One potential limitation of the study is that it is based on simulated environments, which may not fully capture the complexities and uncertainties of real-world maritime settings. While the simulation approach allows for controlled and reproducible experiments, it would be valuable to also validate the findings through field tests or experiments using real-world data.
Additionally, the paper does not delve deeply into the computational complexity and scalability of the RRT algorithms, which could be an important consideration for practical deployment in large-scale maritime operations. Further analysis of the algorithms' scalability and their ability to handle dynamic environments with moving obstacles would strengthen the overall evaluation.
The paper also does not provide a comprehensive discussion of the potential limitations or caveats of the RRT approach for ship trajectory planning. It would be beneficial to explore alternative motion planning techniques, such as Multi-Type Map Construction via Semantics-Aware or Interactive FARINTERACTIVE: Fast, Adaptable Routing and Navigation Among, and compare their strengths and weaknesses in the maritime domain.
Overall, the paper presents a valuable contribution to the field of ship trajectory planning and behavior generation, but further research and validation in real-world settings, as well as a more in-depth discussion of the limitations and potential alternative approaches, would enhance the impact and applicability of the findings.
Conclusion
This paper provides a comparative study of Rapidly-exploring Random Tree (RRT) algorithms applied to the problem of ship trajectory planning and behavior generation. The authors evaluate the performance of three RRT variants - Tube-RRT, Safe Interval RRT, and Adaptive Hybrid Local-Global Sampling - in a simulated maritime environment, considering metrics such as path length, smoothness, and collision avoidance.
The findings of this research can help researchers and practitioners in the maritime domain select the most appropriate RRT algorithm for their specific applications, such as autonomous ship navigation, naval operations, and maritime transportation. The insights gained from this study can also inform the development of more advanced motion planning techniques for complex environments, contributing to the advancement of autonomous systems and decision-making in the maritime industry.
While the paper provides a solid foundation for understanding the performance of RRT algorithms in ship trajectory planning, further research is needed to validate the findings in real-world settings and explore alternative motion planning approaches that may offer complementary strengths and capabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
MINER-RRT*: A Hierarchical and Fast Trajectory Planning Framework in 3D Cluttered Environments
Pengyu Wang, Jiawei Tang, Hin Wang Lin, Fan Zhang, Chaoqun Wang, Jiankun Wang, Ling Shi, Max Q. -H. Meng
0
0
Trajectory planning for quadrotors in cluttered environments has been challenging in recent years. While many trajectory planning frameworks have been successful, there still exists potential for improvements, particularly in enhancing the speed of generating efficient trajectories. In this paper, we present a novel hierarchical trajectory planning framework to reduce computational time and memory usage called MINER-RRT*, which consists of two main components. First, we propose a sampling-based path planning method boosted by neural networks, where the predicted heuristic region accelerates the convergence of rapidly-exploring random trees. Second, we utilize the optimal conditions derived from the quadrotor's differential flatness properties to construct polynomial trajectories that minimize control effort in multiple stages. Extensive simulation and real-world experimental results demonstrate that, compared to several state-of-the-art (SOTA) approaches, our method can generate high-quality trajectories with better performance in 3D cluttered environments.
6/17/2024

Search-based versus Sampling-based Robot Motion Planning: A Comparative Study
Georgios Sotirchos, Zlatan Ajanovic
0
0
Robot motion planning is a challenging domain as it involves dealing with high-dimensional and continuous search space. In past decades, a wide variety of planning algorithms have been developed to tackle this problem, sometimes in isolation without comparing to each other. In this study, we benchmark two such prominent types of algorithms: OMPL's sampling-based RRT-Connect and SMPL's search-based ARA* with motion primitives. To compare these two fundamentally different approaches fairly, we adapt them to ensure the same planning conditions and benchmark them on the same set of planning scenarios. Our findings suggest that sampling-based planners like RRT-Connect show more consistent performance across the board in high-dimensional spaces, whereas search-based planners like ARA* have the capacity to perform significantly better when used with a suitable action-space sampling scheme. Through this study, we hope to showcase the effort required to properly benchmark motion planners from different paradigms thereby contributing to a more nuanced understanding of their capabilities and limitations. The code is available at https://github.com/gsotirchos/benchmarking_planners
6/18/2024

Greedy Heuristics for Sampling-based Motion Planning in High-Dimensional State Spaces
Phone Thiha Kyaw, Anh Vu Le, Lim Yi, Prabakaran Veerajagadheswar, Mohan Rajesh Elara, Dinh Tung Vo, Minh Bui Vu
0
0
Sampling-based motion planning algorithms are very effective at finding solutions in high-dimensional continuous state spaces as they do not require prior approximations of the problem domain compared to traditional discrete graph-based searches. The anytime version of the Rapidly-exploring Random Trees (RRT) algorithm, denoted as RRT*, often finds high-quality solutions by incrementally approximating and searching the problem domain through random sampling. However, due to its low sampling efficiency and slow convergence rate, research has proposed many variants of RRT*, incorporating different heuristics and sampling strategies to overcome the constraints in complex planning problems. Yet, these approaches address specific convergence aspects of RRT* limitations, leaving a need for a sampling-based algorithm that can quickly find better solutions in complex high-dimensional state spaces with a faster convergence rate for practical motion planning applications. This article unifies and leverages the greedy search and heuristic techniques used in various RRT* variants to develop a greedy version of the anytime Rapidly-exploring Random Trees algorithm, denoted as Greedy RRT* (G-RRT*). It improves the initial solution-finding time of RRT* by maintaining two trees rooted at both the start and goal ends, advancing toward each other using greedy connection heuristics. It also accelerates the convergence rate of RRT* by introducing a greedy version of direct informed sampling procedure, which guides the sampling towards the promising region of the problem domain based on heuristics. We validate our approach on simulated planning problems, manipulation problems on Barrett WAM Arms, and on a self-reconfigurable robot, Panthera. Results show that G-RRT* produces asymptotically optimal solution paths and outperforms state-of-the-art RRT* variants, especially in high-dimensional planning problems.
5/7/2024
Tube-RRT*: Efficient Homotopic Path Planning for Swarm Robotics Passing-Through Large-Scale Obstacle Environments
Pengda Mao, Quan Quan
0
0
Recently, the concept of optimal virtual tube has emerged as a novel solution to the challenging task of navigating obstacle-dense environments for swarm robotics, offering a wide ranging of applications. However, it lacks an efficient homotopic path planning method in obstacle-dense environments. This paper introduces Tube-RRT*, an innovative homotopic path planning method that builds upon and improves the Rapidly-exploring Random Tree (RRT) algorithm. Tube-RRT* is specifically designed to generate homotopic paths for the trajectories in the virtual tube, strategically considering opening volume and tube length to mitigate swarm congestion and ensure agile navigation. Through comprehensive comparative simulations conducted within complex, large-scale obstacle environments, we demonstrate the effectiveness of Tube-RRT*.
4/16/2024