DualRefine: Self-Supervised Depth and Pose Estimation Through Iterative Epipolar Sampling and Refinement Toward Equilibrium
2304.03560
0
0
🧪
Abstract
Self-supervised multi-frame depth estimation achieves high accuracy by computing matching costs of pixel correspondences between adjacent frames, injecting geometric information into the network. These pixel-correspondence candidates are computed based on the relative pose estimates between the frames. Accurate pose predictions are essential for precise matching cost computation as they influence the epipolar geometry. Furthermore, improved depth estimates can, in turn, be used to align pose estimates. Inspired by traditional structure-from-motion (SfM) principles, we propose the DualRefine model, which tightly couples depth and pose estimation through a feedback loop. Our novel update pipeline uses a deep equilibrium model framework to iteratively refine depth estimates and a hidden state of feature maps by computing local matching costs based on epipolar geometry. Importantly, we used the refined depth estimates and feature maps to compute pose updates at each step. This update in the pose estimates slowly alters the epipolar geometry during the refinement process. Experimental results on the KITTI dataset demonstrate competitive depth prediction and odometry prediction performance surpassing published self-supervised baselines.
Create account to get full access
Overview
- This paper proposes a novel deep learning model called DualRefine for self-supervised multi-frame depth estimation.
- DualRefine tightly couples depth and pose estimation through a feedback loop, iteratively refining both depth estimates and camera pose.
- The model uses a deep equilibrium model framework to compute local matching costs based on epipolar geometry, which are used to update both depth and pose.
- Experimental results on the KITTI dataset show DualRefine achieves competitive depth prediction and odometry performance compared to published self-supervised baselines.
Plain English Explanation
The paper presents a new deep learning model called DualRefine that can accurately estimate depth and camera pose from a sequence of video frames, without any supervised training. The key insight is that depth and pose information are closely linked - accurate depth helps improve pose estimation, and vice versa.
DualRefine works by repeatedly refining both the depth and pose estimates in an iterative feedback loop. It uses a special type of neural network called a "deep equilibrium model" to compute local pixel-level matching costs based on the epipolar geometry between frames. These matching costs are then used to update the depth and pose estimates, slowly improving them over multiple iterations.
The tight coupling of depth and pose estimation is inspired by traditional "structure-from-motion" techniques, where 3D scene structure and camera motion are recovered together. By tightly integrating these two tasks, DualRefine is able to achieve state-of-the-art performance on benchmarks like the KITTI dataset, surpassing other self-supervised depth and odometry prediction methods.
Technical Explanation
The core of the DualRefine model is a deep equilibrium network that iteratively refines depth estimates and a hidden feature representation by computing local pixel-level matching costs. These matching costs are derived from the epipolar geometry between adjacent video frames, which is determined by the relative camera pose.
Importantly, the refined depth estimates are then used to update the pose estimates at each iteration. This creates a feedback loop where improved depth leads to better pose estimation, which in turn enables more accurate depth computation based on the updated epipolar constraints. This tight coupling of depth and pose is inspired by traditional structure-from-motion approaches.
The authors show that this iterative refinement process, using a deep equilibrium model, can outperform published self-supervised baselines for both depth prediction and odometry estimation on the KITTI dataset. The results demonstrate the benefits of jointly reasoning about depth and pose, rather than treating them as separate tasks.
Critical Analysis
The key strength of the DualRefine model is its ability to tightly couple depth and pose estimation, allowing the two tasks to mutually inform and improve each other. This is a compelling approach that builds on principles from traditional structure-from-motion techniques.
However, the paper does not provide a detailed analysis of the model's failure cases or limitations. It would be helpful to understand scenarios where the iterative refinement process might struggle, such as handling occlusions, large camera motions, or dynamic scenes. Additionally, the paper does not compare DualRefine to more recent self-supervised depth estimation methods like EcoDepth, which may offer complementary strengths.
Overall, the DualRefine model represents an interesting and promising approach to self-supervised depth and pose estimation. Further research could explore ways to make the model more robust and generalize to a wider range of challenging scenarios.
Conclusion
The DualRefine model presented in this paper demonstrates the benefits of tightly coupling depth and pose estimation in a self-supervised deep learning framework. By iteratively refining both depth and pose using a deep equilibrium network, the model is able to achieve state-of-the-art performance on benchmarks like the KITTI dataset.
This work highlights the importance of jointly reasoning about 3D scene structure and camera motion, rather than treating them as separate tasks. The feedback loop between depth and pose estimation allows the model to continually improve its understanding of the underlying geometry, leading to more accurate predictions.
While the paper does not fully explore the model's limitations, the DualRefine approach represents an exciting step forward in self-supervised depth and odometry estimation. Further research in this direction could lead to even more robust and versatile visual understanding systems, with applications in autonomous navigation, augmented reality, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
M${^2}$Depth: Self-supervised Two-Frame Multi-camera Metric Depth Estimation
Yingshuang Zou, Yikang Ding, Xi Qiu, Haoqian Wang, Haotian Zhang
0
0
This paper presents a novel self-supervised two-frame multi-camera metric depth estimation network, termed M${^2}$Depth, which is designed to predict reliable scale-aware surrounding depth in autonomous driving. Unlike the previous works that use multi-view images from a single time-step or multiple time-step images from a single camera, M${^2}$Depth takes temporally adjacent two-frame images from multiple cameras as inputs and produces high-quality surrounding depth. We first construct cost volumes in spatial and temporal domains individually and propose a spatial-temporal fusion module that integrates the spatial-temporal information to yield a strong volume presentation. We additionally combine the neural prior from SAM features with internal features to reduce the ambiguity between foreground and background and strengthen the depth edges. Extensive experimental results on nuScenes and DDAD benchmarks show M${^2}$Depth achieves state-of-the-art performance. More results can be found in https://heiheishuang.xyz/M2Depth .
5/6/2024
📶
SPIdepth: Strengthened Pose Information for Self-supervised Monocular Depth Estimation
Mykola Lavreniuk
0
0
Self-supervised monocular depth estimation has garnered considerable attention for its applications in autonomous driving and robotics. While recent methods have made strides in leveraging techniques like the Self Query Layer (SQL) to infer depth from motion, they often overlook the potential of strengthening pose information. In this paper, we introduce SPIdepth, a novel approach that prioritizes enhancing the pose network for improved depth estimation. Building upon the foundation laid by SQL, SPIdepth emphasizes the importance of pose information in capturing fine-grained scene structures. By enhancing the pose network's capabilities, SPIdepth achieves remarkable advancements in scene understanding and depth estimation. Experimental results on benchmark datasets such as KITTI and Cityscapes showcase SPIdepth's state-of-the-art performance, surpassing previous methods by significant margins. Notably, SPIdepth's performance exceeds that of unsupervised models and, after finetuning on metric data, outperforms all existing methods. Remarkably, SPIdepth achieves these results using only a single image for inference, surpassing even methods that utilize video sequences for inference, thus demonstrating its efficacy and efficiency in real-world applications. Our approach represents a significant leap forward in self-supervised monocular depth estimation, underscoring the importance of strengthening pose information for advancing scene understanding in real-world applications.
4/22/2024
DoubleTake: Geometry Guided Depth Estimation
Mohamed Sayed, Filippo Aleotti, Jamie Watson, Zawar Qureshi, Guillermo Garcia-Hernando, Gabriel Brostow, Sara Vicente, Michael Firman
0
0
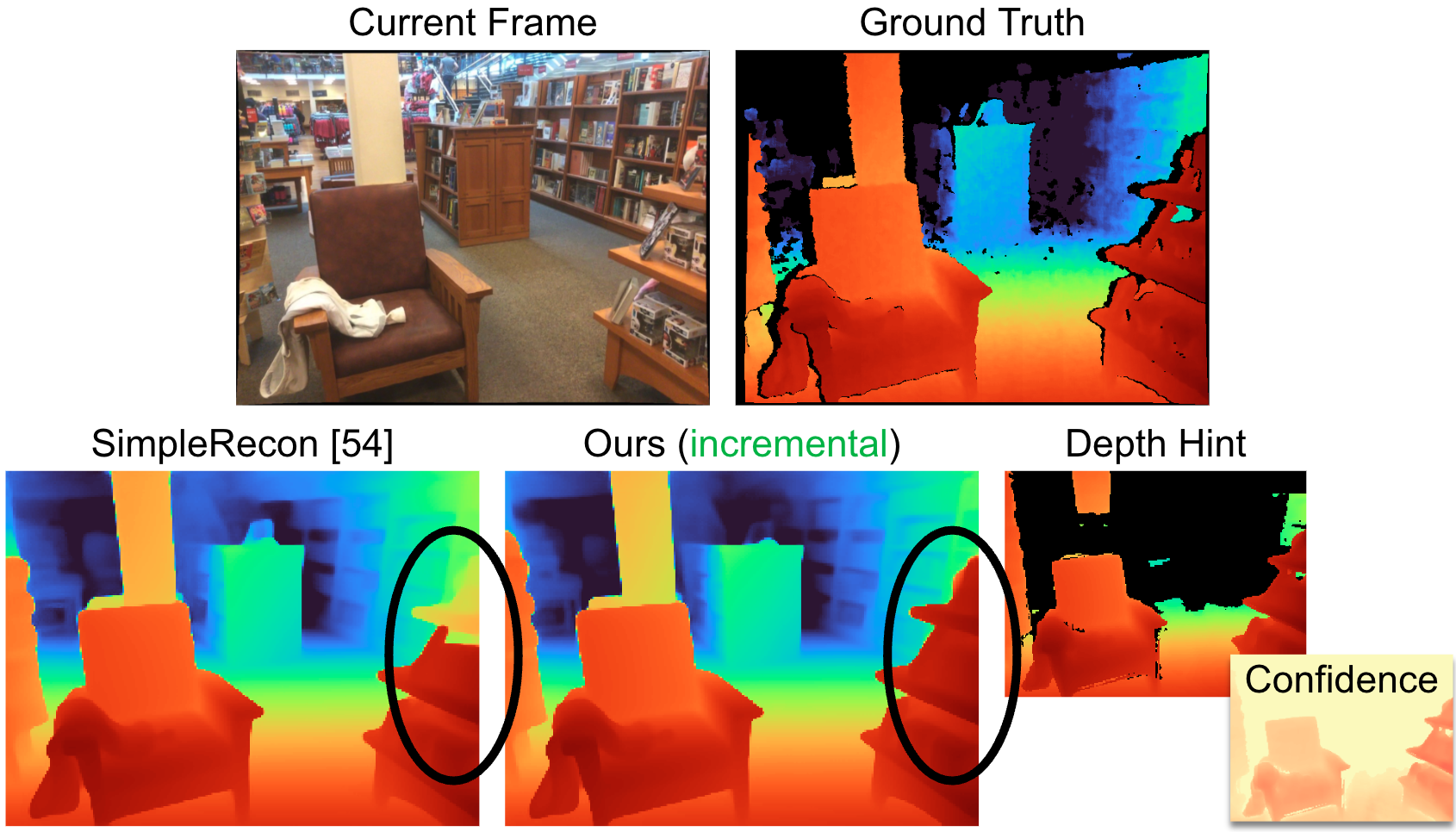
Estimating depth from a sequence of posed RGB images is a fundamental computer vision task, with applications in augmented reality, path planning etc. Prior work typically makes use of previous frames in a multi view stereo framework, relying on matching textures in a local neighborhood. In contrast, our model leverages historical predictions by giving the latest 3D geometry data as an extra input to our network. This self-generated geometric hint can encode information from areas of the scene not covered by the keyframes and it is more regularized when compared to individual predicted depth maps for previous frames. We introduce a Hint MLP which combines cost volume features with a hint of the prior geometry, rendered as a depth map from the current camera location, together with a measure of the confidence in the prior geometry. We demonstrate that our method, which can run at interactive speeds, achieves state-of-the-art estimates of depth and 3D scene reconstruction in both offline and incremental evaluation scenarios.
6/27/2024
📈
Mining Supervision for Dynamic Regions in Self-Supervised Monocular Depth Estimation
Hoang Chuong Nguyen, Tianyu Wang, Jose M. Alvarez, Miaomiao Liu
0
0
This paper focuses on self-supervised monocular depth estimation in dynamic scenes trained on monocular videos. Existing methods jointly estimate pixel-wise depth and motion, relying mainly on an image reconstruction loss. Dynamic regions1 remain a critical challenge for these methods due to the inherent ambiguity in depth and motion estimation, resulting in inaccurate depth estimation. This paper proposes a self-supervised training framework exploiting pseudo depth labels for dynamic regions from training data. The key contribution of our framework is to decouple depth estimation for static and dynamic regions of images in the training data. We start with an unsupervised depth estimation approach, which provides reliable depth estimates for static regions and motion cues for dynamic regions and allows us to extract moving object information at the instance level. In the next stage, we use an object network to estimate the depth of those moving objects assuming rigid motions. Then, we propose a new scale alignment module to address the scale ambiguity between estimated depths for static and dynamic regions. We can then use the depth labels generated to train an end-to-end depth estimation network and improve its performance. Extensive experiments on the Cityscapes and KITTI datasets show that our self-training strategy consistently outperforms existing self/unsupervised depth estimation methods.
4/24/2024