Motion State: A New Benchmark Multiple Object Tracking

0
Sign in to get full access
Overview
- Proposes a novel motion-static object tracking method called MoD2T (Model-Data-Driven Motion-Static Object Tracking)
- Combines motion detection and static object tracking to improve multi-object tracking performance
- Leverages both model-driven and data-driven approaches for robust tracking in challenging environments
Plain English Explanation
The paper presents a new method for tracking both moving and stationary objects in video footage, called MoD2T. Traditional multi-object tracking systems often struggle with scenes containing a mix of stationary and moving objects. MoD2T addresses this challenge by integrating two key components: motion detection and static object tracking.
The motion detection module identifies moving objects in the video using computer vision techniques. The static object tracking module then focuses on detecting and following objects that are not moving, such as parked cars or people standing still. By combining these two approaches, MoD2T can more accurately keep track of all the relevant objects in a complex scene, whether they are in motion or not.
The method uses a hybrid approach, drawing on both "model-driven" techniques (based on predefined rules and assumptions) and "data-driven" machine learning algorithms. This helps make the tracking more robust and adaptable to different environments and scenarios.
Technical Explanation
The MoD2T method first uses motion detection to identify moving objects in the video frames. This is done using a combination of background subtraction, blob detection, and object segmentation. The motion information is then fused with static object detections from a pre-trained deep learning model to provide a comprehensive understanding of the scene.
For the static object tracking, the method employs a Kalman filter-based tracker, which uses a state-space model to predict the future locations of stationary objects. This is combined with appearance features extracted from the object detections to associate detections across frames and maintain consistent object identities.
The fusion of motion and static object information is a key innovation of the MoD2T approach. By considering both moving and stationary elements, the method can more reliably track all the relevant objects in challenging scenarios, such as crowded environments or scenes with occlusions.
The paper evaluates the MoD2T method on several public multi-object tracking benchmarks, demonstrating improved performance compared to state-of-the-art trackers that only focus on moving objects. The results highlight the benefits of the hybrid model-data-driven design and the effective combination of motion and static object cues.
Critical Analysis
The paper makes a compelling case for the importance of considering both motion and static object information for robust multi-object tracking. The MoD2T method represents a step forward in this direction, but the authors acknowledge several limitations and areas for further research.
One key challenge is handling object interactions and occlusions, which can still be difficult to resolve even with the additional static object information. The authors suggest exploring more sophisticated data association and occlusion handling techniques to address this.
Additionally, the method relies on a pre-trained object detection model for the static object tracking component. The performance of this module could potentially be improved by fine-tuning or adapting the detection model to the specific tracking task and dataset.
Further research could also explore ways to more tightly integrate the motion detection and static object tracking components, rather than treating them as separate modules. This could lead to more efficient and holistic scene understanding for even more robust multi-object tracking.
Conclusion
The MoD2T method presented in this paper represents an important advance in multi-object tracking by explicitly considering both moving and stationary objects. By fusing motion detection and static object tracking, the approach can more accurately follow all relevant elements in complex scenes, outperforming traditional trackers that focus only on moving targets.
The hybrid model-data-driven design and effective combination of complementary cues are the key innovations of this work. While there is still room for improvement, particularly in handling occlusions and object interactions, the MoD2T method demonstrates the value of a more comprehensive approach to multi-object tracking. This research has the potential to significantly enhance the robustness and applicability of tracking systems in a wide range of real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Motion State: A New Benchmark Multiple Object Tracking
Yang Feng, Liao Pan, Wu Di, Liu Bo, Zhang Xingle
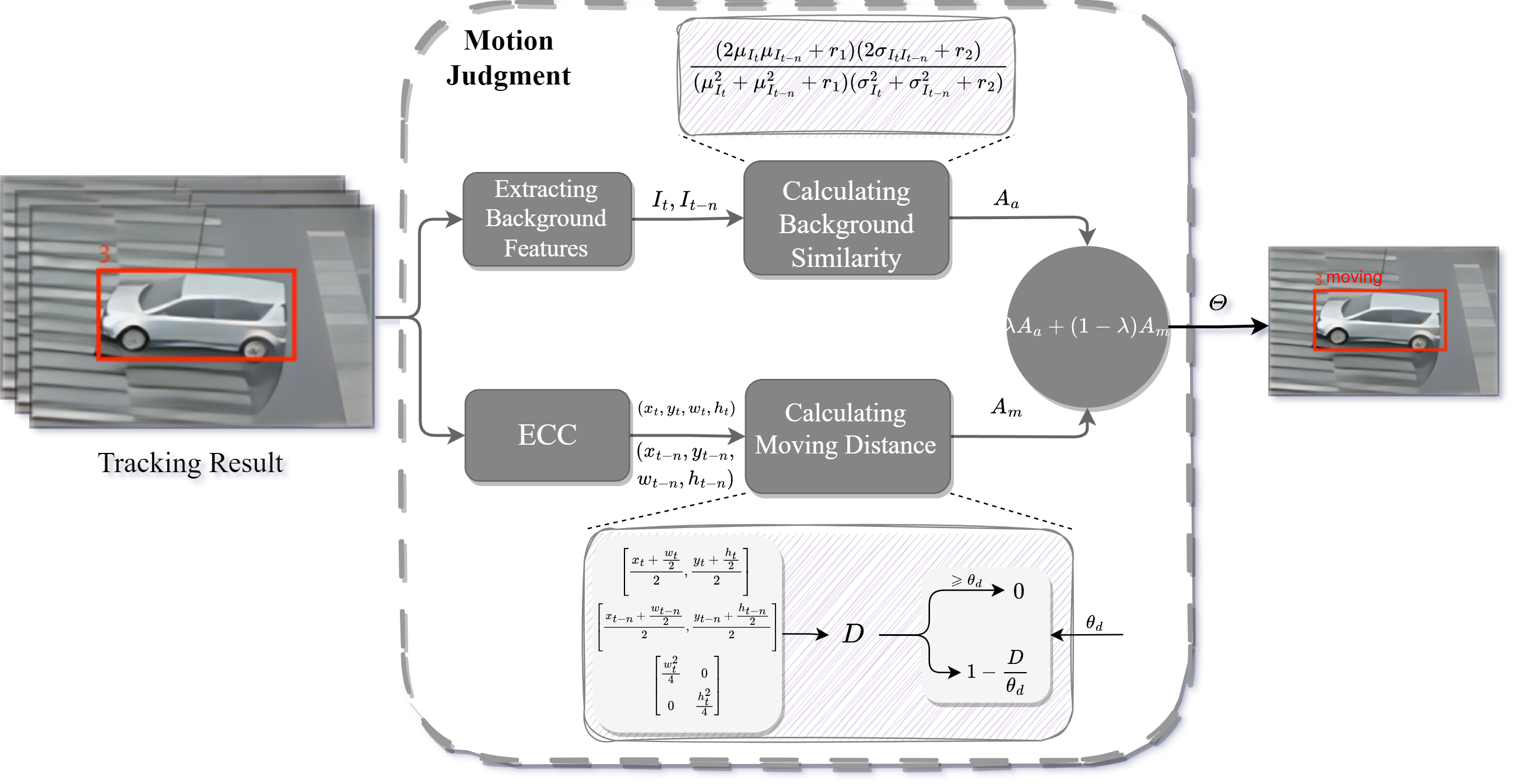
In the realm of video analysis, the field of multiple object tracking (MOT) assumes paramount importance, with the motion state of objects-whether static or dynamic relative to the ground-holding practical significance across diverse scenarios. However, the extant literature exhibits a notable dearth in the exploration of this aspect. Deep learning methodologies encounter challenges in accurately discerning object motion states, while conventional approaches reliant on comprehensive mathematical modeling may yield suboptimal tracking accuracy. To address these challenges, we introduce a Model-Data-Driven Motion State Judgment Object Tracking Method (MoD2T). This innovative architecture adeptly amalgamates traditional mathematical modeling with deep learning-based multi-object tracking frameworks. The integration of mathematical modeling and deep learning within MoD2T enhances the precision of object motion state determination, thereby elevating tracking accuracy. Our empirical investigations comprehensively validate the efficacy of MoD2T across varied scenarios, encompassing unmanned aerial vehicle surveillance and street-level tracking. Furthermore, to gauge the method's adeptness in discerning object motion states, we introduce the Motion State Validation F1 (MVF1) metric. This novel performance metric aims to quantitatively assess the accuracy of motion state classification, furnishing a comprehensive evaluation of MoD2T's performance. Elaborate experimental validations corroborate the rationality of MVF1. In order to holistically appraise MoD2T's performance, we meticulously annotate several renowned datasets and subject MoD2T to stringent testing. Remarkably, under conditions characterized by minimal or moderate camera motion, the achieved MVF1 values are particularly noteworthy, with exemplars including 0.774 for the KITTI dataset, 0.521 for MOT17, and 0.827 for UAVDT.
Read more5/8/2024

0
MambaTrack: A Simple Baseline for Multiple Object Tracking with State Space Model
Changcheng Xiao, Qiong Cao, Zhigang Luo, Long Lan
Tracking by detection has been the prevailing paradigm in the field of Multi-object Tracking (MOT). These methods typically rely on the Kalman Filter to estimate the future locations of objects, assuming linear object motion. However, they fall short when tracking objects exhibiting nonlinear and diverse motion in scenarios like dancing and sports. In addition, there has been limited focus on utilizing learning-based motion predictors in MOT. To address these challenges, we resort to exploring data-driven motion prediction methods. Inspired by the great expectation of state space models (SSMs), such as Mamba, in long-term sequence modeling with near-linear complexity, we introduce a Mamba-based motion model named Mamba moTion Predictor (MTP). MTP is designed to model the complex motion patterns of objects like dancers and athletes. Specifically, MTP takes the spatial-temporal location dynamics of objects as input, captures the motion pattern using a bi-Mamba encoding layer, and predicts the next motion. In real-world scenarios, objects may be missed due to occlusion or motion blur, leading to premature termination of their trajectories. To tackle this challenge, we further expand the application of MTP. We employ it in an autoregressive way to compensate for missing observations by utilizing its own predictions as inputs, thereby contributing to more consistent trajectories. Our proposed tracker, MambaTrack, demonstrates advanced performance on benchmarks such as Dancetrack and SportsMOT, which are characterized by complex motion and severe occlusion.
Read more8/20/2024

0
Effective Motion Modeling for UAV-platform Multiple Object Tracking with Re-Margin Loss
Mufeng Yao, Jinlong Peng, Qingdong He, Bo Peng, Hao Chen, Mingmin Chi, Chao Liu, Jon Atli Benediktsson
Multiple object tracking (MOT) from unmanned aerial vehicle (UAV) platforms requires efficient motion modeling. This is because UAV-MOT faces both local object motion and global camera motion. Motion blur also increases the difficulty of detecting large moving objects. Previous UAV motion modeling approaches either focus only on local motion or ignore motion blurring effects, thus limiting their tracking performance and speed. To address these issues, we propose the Motion Mamba Module, which explores both local and global motion features through cross-correlation and bi-directional Mamba Modules for better motion modeling. To address the detection difficulties caused by motion blur, we also design motion margin loss to effectively improve the detection accuracy of motion blurred objects. Based on the Motion Mamba module and motion margin loss, our proposed MM-Tracker surpasses the state-of-the-art in two widely open-source UAV-MOT datasets. Code will be available.
Read more8/20/2024

0
DroneMOT: Drone-based Multi-Object Tracking Considering Detection Difficulties and Simultaneous Moving of Drones and Objects
Peng Wang, Yongcai Wang, Deying Li
Multi-object tracking (MOT) on static platforms, such as by surveillance cameras, has achieved significant progress, with various paradigms providing attractive performances. However, the effectiveness of traditional MOT methods is significantly reduced when it comes to dynamic platforms like drones. This decrease is attributed to the distinctive challenges in the MOT-on-drone scenario: (1) objects are generally small in the image plane, blurred, and frequently occluded, making them challenging to detect and recognize; (2) drones move and see objects from different angles, causing the unreliability of the predicted positions and feature embeddings of the objects. This paper proposes DroneMOT, which firstly proposes a Dual-domain Integrated Attention (DIA) module that considers the fast movements of drones to enhance the drone-based object detection and feature embedding for small-sized, blurred, and occluded objects. Then, an innovative Motion-Driven Association (MDA) scheme is introduced, considering the concurrent movements of both the drone and the objects. Within MDA, an Adaptive Feature Synchronization (AFS) technique is presented to update the object features seen from different angles. Additionally, a Dual Motion-based Prediction (DMP) method is employed to forecast the object positions. Finally, both the refined feature embeddings and the predicted positions are integrated to enhance the object association. Comprehensive evaluations on VisDrone2019-MOT and UAVDT datasets show that DroneMOT provides substantial performance improvements over the state-of-the-art in the domain of MOT on drones.
Read more7/15/2024