Model-Based Reinforcement Learning with Multi-Task Offline Pretraining
2306.03360
0
0
🏅
Abstract
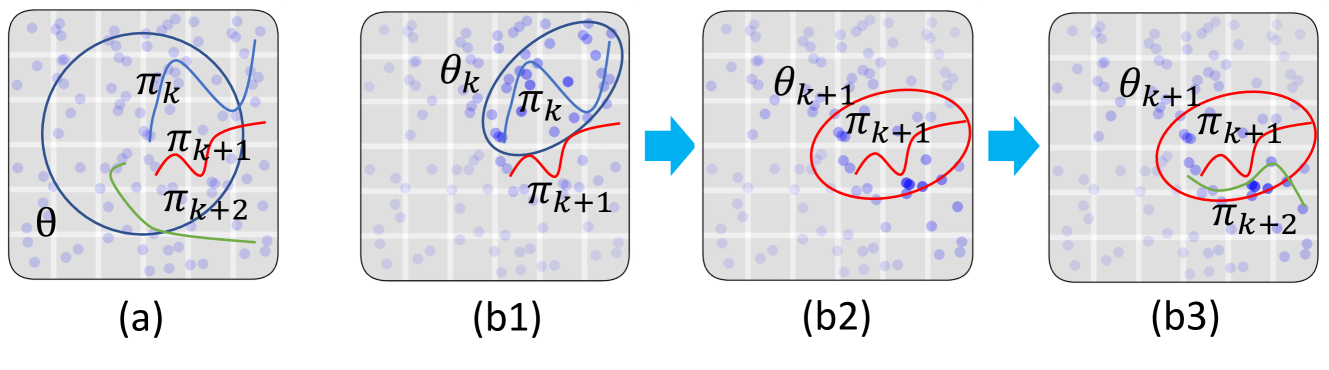
Pretraining reinforcement learning (RL) models on offline datasets is a promising way to improve their training efficiency in online tasks, but challenging due to the inherent mismatch in dynamics and behaviors across various tasks. We present a model-based RL method that learns to transfer potentially useful dynamics and action demonstrations from offline data to a novel task. The main idea is to use the world models not only as simulators for behavior learning but also as tools to measure the task relevance for both dynamics representation transfer and policy transfer. We build a time-varying, domain-selective distillation loss to generate a set of offline-to-online similarity weights. These weights serve two purposes: (i) adaptively transferring the task-agnostic knowledge of physical dynamics to facilitate world model training, and (ii) learning to replay relevant source actions to guide the target policy. We demonstrate the advantages of our approach compared with the state-of-the-art methods in Meta-World and DeepMind Control Suite.
Create account to get full access
Overview
- Pretraining reinforcement learning (RL) models on offline datasets can improve their training efficiency in online tasks, but is challenging due to the mismatch in dynamics and behaviors across tasks.
- The paper presents a model-based RL method that learns to transfer useful dynamics and action demonstrations from offline data to a novel task.
- The key idea is to use world models to measure task relevance for transferring both dynamics representation and policy.
- The approach adaptively transfers task-agnostic physical dynamics knowledge to facilitate world model training, and learns to replay relevant source actions to guide the target policy.
Plain English Explanation
Reinforcement learning (RL) models can be trained more efficiently by first learning from offline datasets, before applying them to online tasks. However, this is difficult because the offline and online settings often have very different dynamics and behaviors.
This paper introduces a new RL method that can effectively transfer useful information from the offline data to help with a new online task. The core innovation is the use of "world models" - simulations of the task environment. These world models serve two key purposes:
-
They help measure how relevant the offline data is to the new task, allowing the system to selectively transfer the most useful dynamics knowledge from the offline data.
-
They enable the system to identify and replay the most relevant actions from the offline data to guide the training of the new policy.
By adaptively transferring relevant knowledge in this way, the RL model can learn the new task more efficiently, compared to state-of-the-art methods. The paper demonstrates the advantages of this approach on a range of benchmark tasks.
Technical Explanation
The paper proposes a model-based RL method, called Learning from Random Demonstrations for Offline RL, that leverages offline datasets to accelerate learning on novel online tasks.
The key technical components are:
-
Domain-Selective Distillation: The system learns a set of similarity weights that measure the relevance of the offline dynamics and actions to the new task. These weights are used to adaptively transfer the task-agnostic physical dynamics knowledge from the offline data to facilitate world model training.
-
Offline-Online Replay: The similarity weights are also used to selectively replay the most relevant source actions from the offline data to guide the policy learning on the new task.
The authors demonstrate the effectiveness of their approach on challenging benchmark tasks from Meta-World and DeepMind Control Suite, outperforming state-of-the-art methods such as Ensemble Successor Representations for Task Generalization and Scrutinize What We Ignore.
Critical Analysis
The paper presents a promising approach for transferring knowledge from offline datasets to improve the efficiency of RL agents on new tasks. However, the authors acknowledge several limitations and areas for future work:
-
The method relies on the availability of diverse offline datasets that cover a wide range of dynamics and behaviors. In real-world settings, such comprehensive datasets may not always be available.
-
The adaptive transfer mechanism, while effective, could potentially be further improved by incorporating more sophisticated task representation learning techniques.
-
The paper focuses on single-task settings, but extending the approach to handle more complex multi-task and continual learning scenarios could be an interesting direction for future research.
Overall, this work makes an important contribution to the field of offline RL, demonstrating the value of leveraging offline data to accelerate learning on new tasks. However, as with any research, there is room for further refinement and expansion to address the remaining challenges.
Conclusion
This paper introduces a novel model-based RL method that can effectively transfer useful knowledge from offline datasets to improve the training efficiency of RL agents on new online tasks. By using world models to measure task relevance and selectively transfer dynamics and action knowledge, the approach outperforms state-of-the-art methods on benchmark tasks.
The key insights from this work highlight the potential of leveraging offline data to accelerate RL, as well as the importance of developing adaptive transfer mechanisms that can bridge the gap between offline and online settings. As the field of offline RL continues to evolve, this research represents an important step forward in enhancing the sample efficiency and practicality of RL systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Learning from Random Demonstrations: Offline Reinforcement Learning with Importance-Sampled Diffusion Models
Zeyu Fang, Tian Lan
0
0
Generative models such as diffusion have been employed as world models in offline reinforcement learning to generate synthetic data for more effective learning. Existing work either generates diffusion models one-time prior to training or requires additional interaction data to update it. In this paper, we propose a novel approach for offline reinforcement learning with closed-loop policy evaluation and world-model adaptation. It iteratively leverages a guided diffusion world model to directly evaluate the offline target policy with actions drawn from it, and then performs an importance-sampled world model update to adaptively align the world model with the updated policy. We analyzed the performance of the proposed method and provided an upper bound on the return gap between our method and the real environment under an optimal policy. The result sheds light on various factors affecting learning performance. Evaluations in the D4RL environment show significant improvement over state-of-the-art baselines, especially when only random or medium-expertise demonstrations are available -- thus requiring improved alignment between the world model and offline policy evaluation.
5/31/2024
Offline Trajectory Generalization for Offline Reinforcement Learning
Ziqi Zhao, Zhaochun Ren, Liu Yang, Fajie Yuan, Pengjie Ren, Zhumin Chen, jun Ma, Xin Xin
0
0
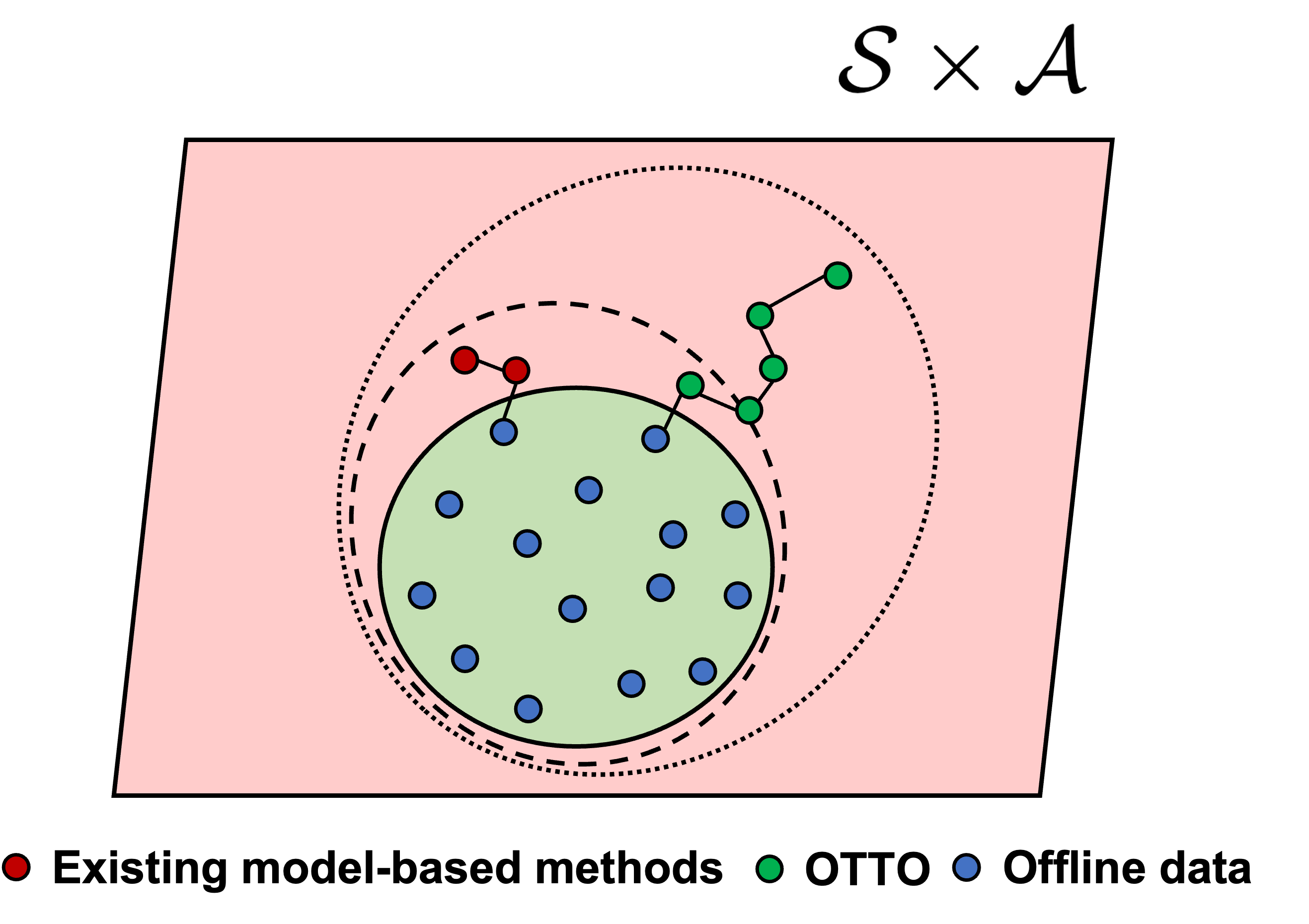
Offline reinforcement learning (RL) aims to learn policies from static datasets of previously collected trajectories. Existing methods for offline RL either constrain the learned policy to the support of offline data or utilize model-based virtual environments to generate simulated rollouts. However, these methods suffer from (i) poor generalization to unseen states; and (ii) trivial improvement from low-qualified rollout simulation. In this paper, we propose offline trajectory generalization through world transformers for offline reinforcement learning (OTTO). Specifically, we use casual Transformers, a.k.a. World Transformers, to predict state dynamics and the immediate reward. Then we propose four strategies to use World Transformers to generate high-rewarded trajectory simulation by perturbing the offline data. Finally, we jointly use offline data with simulated data to train an offline RL algorithm. OTTO serves as a plug-in module and can be integrated with existing offline RL methods to enhance them with better generalization capability of transformers and high-rewarded data augmentation. Conducting extensive experiments on D4RL benchmark datasets, we verify that OTTO significantly outperforms state-of-the-art offline RL methods.
4/17/2024

Single-Task Continual Offline Reinforcement Learning
Sibo Gai, Donglin Wang
0
0
In this paper, we study the continual learning problem of single-task offline reinforcement learning. In the past, continual reinforcement learning usually only dealt with multitasking, that is, learning multiple related or unrelated tasks in a row, but once each learned task was learned, it was not relearned, but only used in subsequent processes. However, offline reinforcement learning tasks require the continuously learning of multiple different datasets for the same task. Existing algorithms will try their best to achieve the best results in each offline dataset they have learned and the skills of the network will overwrite the high-quality datasets that have been learned after learning the subsequent poor datasets. On the other hand, if too much emphasis is placed on stability, the network will learn the subsequent better dataset after learning the poor offline dataset, and the problem of insufficient plasticity and non-learning will occur. How to design a strategy that can always preserve the best performance for each state in the data that has been learned is a new challenge and the focus of this study. Therefore, this study proposes a new algorithm, called Ensemble Offline Reinforcement Learning Based on Experience Replay, which introduces multiple value networks to learn the same dataset and judge whether the strategy has been learned by the discrete degree of the value network, to improve the performance of the network in single-task offline reinforcement learning.
5/6/2024
Ensemble Successor Representations for Task Generalization in Offline-to-Online Reinforcement Learning
Changhong Wang, Xudong Yu, Chenjia Bai, Qiaosheng Zhang, Zhen Wang
0
0
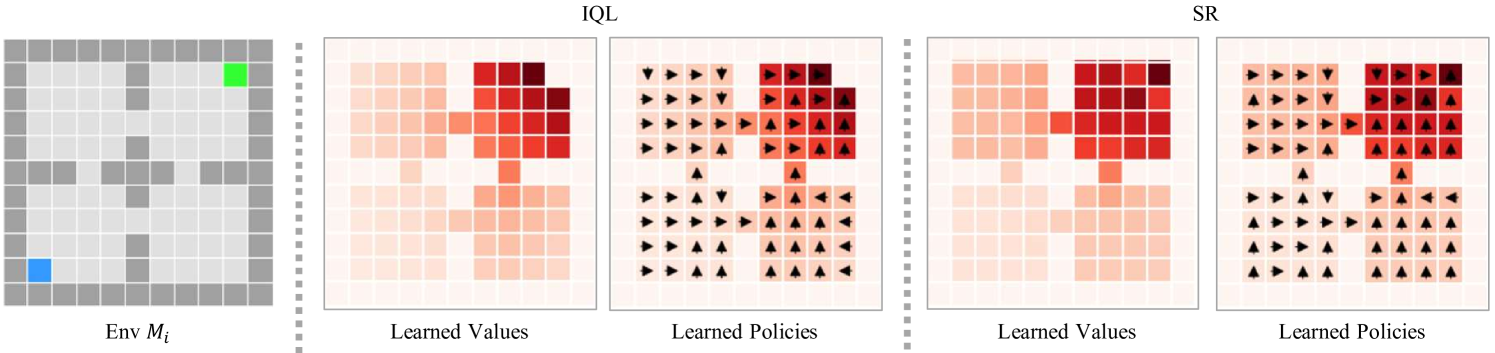
In Reinforcement Learning (RL), training a policy from scratch with online experiences can be inefficient because of the difficulties in exploration. Recently, offline RL provides a promising solution by giving an initialized offline policy, which can be refined through online interactions. However, existing approaches primarily perform offline and online learning in the same task, without considering the task generalization problem in offline-to-online adaptation. In real-world applications, it is common that we only have an offline dataset from a specific task while aiming for fast online-adaptation for several tasks. To address this problem, our work builds upon the investigation of successor representations for task generalization in online RL and extends the framework to incorporate offline-to-online learning. We demonstrate that the conventional paradigm using successor features cannot effectively utilize offline data and improve the performance for the new task by online fine-tuning. To mitigate this, we introduce a novel methodology that leverages offline data to acquire an ensemble of successor representations and subsequently constructs ensemble Q functions. This approach enables robust representation learning from datasets with different coverage and facilitates fast adaption of Q functions towards new tasks during the online fine-tuning phase. Extensive empirical evaluations provide compelling evidence showcasing the superior performance of our method in generalizing to diverse or even unseen tasks.
5/14/2024