Model Predictive Path Integral Control for Agile Unmanned Aerial Vehicles

0

Sign in to get full access
Overview
- This paper presents a Model Predictive Path Integral (MPPI) control approach for agile unmanned aerial vehicles (UAVs).
- The method leverages stochastic optimal control techniques to enable robust and high-performance control of UAVs in complex environments.
- The authors demonstrate the effectiveness of their approach through simulations and real-world experiments on a quadrotor platform.
Plain English Explanation
The paper focuses on developing advanced control algorithms for unmanned aerial vehicles (UAVs), such as quadrotors, to enable them to navigate and perform complex maneuvers in challenging environments. The core idea is to use a technique called Model Predictive Path Integral (MPPI) control, which is a type of stochastic optimal control. This allows the UAV to anticipate and respond to uncertainties, disturbances, and obstacles in its environment, enabling it to perform agile and precise movements.
The authors demonstrate the effectiveness of their MPPI control approach through both simulations and real-world experiments using a quadrotor platform. The results show that the UAV can execute complex maneuvers, such as navigating through tight spaces and performing aggressive turns, while maintaining stability and control.
The significance of this work lies in its potential to improve the capabilities of UAVs, allowing them to operate in more complex and dynamic environments. This could have applications in areas like search and rescue, aerial photography, and infrastructure inspection, where the ability to navigate precisely and respond quickly to changing conditions is critical.
Technical Explanation
The paper presents a Model Predictive Path Integral (MPPI) control approach for agile unmanned aerial vehicles (UAVs). MPPI is a type of stochastic optimal control that can handle uncertainty and disturbances in the system dynamics, allowing for robust and high-performance control.
The authors formulate the UAV control problem as an optimal control problem, where the goal is to find the control inputs that minimize a cost function representing the desired performance objectives, such as tracking a reference trajectory while avoiding obstacles. The MPPI algorithm is then used to solve this optimization problem in a receding-horizon fashion, generating a sequence of control inputs that are applied to the UAV.
The key innovation in this work is the integration of the MPPI approach with a UAV dynamics model and a model of the environment. This allows the controller to anticipate and respond to uncertainties and disturbances, enabling the UAV to perform agile maneuvers while maintaining stability and control.
The authors evaluate their MPPI control approach through both simulations and real-world experiments on a quadrotor platform. The results demonstrate the effectiveness of the method in executing complex maneuvers, such as navigating through tight spaces and performing aggressive turns, while maintaining stable flight.
Critical Analysis
The paper presents a comprehensive and well-designed study on the application of Model Predictive Path Integral (MPPI) control to the control of agile unmanned aerial vehicles (UAVs). The authors have thoroughly evaluated their approach through both simulations and real-world experiments, providing strong evidence for the effectiveness of their method.
One potential area for further research, as mentioned in the paper, is the incorporation of more advanced environmental models, such as multi-model predictive attitude control for quadrotors or Model Predictive Contouring Control (MPCC) for time-optimal trajectories. This could further improve the UAV's ability to navigate in complex and cluttered environments.
Additionally, the authors note that the computational requirements of the MPPI algorithm could be a limiting factor for real-time implementation on resource-constrained platforms. Exploring methods to optimize the algorithm and reduce its computational footprint could be a valuable area of future research.
Overall, this paper presents a significant contribution to the field of UAV control, demonstrating the potential of stochastic optimal control techniques, such as MPPI, to enable agile and robust navigation in challenging environments.
Conclusion
This paper introduces a Model Predictive Path Integral (MPPI) control approach for enabling agile and high-performance control of unmanned aerial vehicles (UAVs). The key innovation is the integration of the MPPI algorithm with a UAV dynamics model and a model of the environment, allowing the controller to anticipate and respond to uncertainties and disturbances.
The authors have thoroughly evaluated their approach through simulations and real-world experiments on a quadrotor platform, demonstrating the effectiveness of their method in executing complex maneuvers while maintaining stable flight. This work represents an important advancement in the field of UAV control, with potential applications in areas such as search and rescue, aerial photography, and infrastructure inspection, where the ability to navigate precisely and respond quickly to changing conditions is critical.
The authors have also identified areas for future research, such as incorporating more advanced environmental models and optimizing the computational requirements of the MPPI algorithm. Continued advancements in these areas could further enhance the capabilities of UAVs and unlock new applications for these versatile platforms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Model Predictive Path Integral Control for Agile Unmanned Aerial Vehicles
Michal Minarik, Robert Penicka, Vojtech Vonasek, Martin Saska
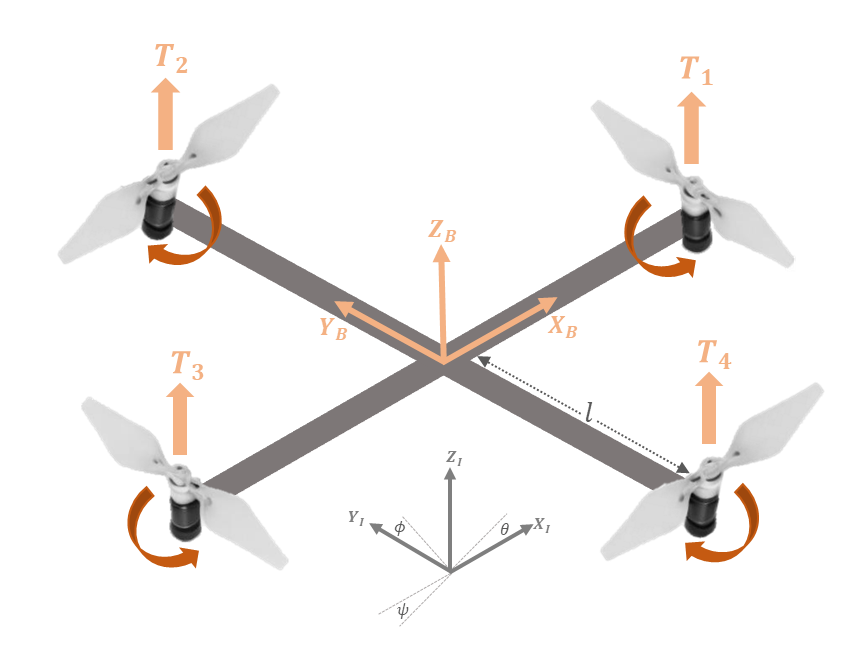
This paper introduces a control architecture for real-time and onboard control of Unmanned Aerial Vehicles (UAVs) in environments with obstacles using the Model Predictive Path Integral (MPPI) methodology. MPPI allows the use of the full nonlinear model of UAV dynamics and a more general cost function at the cost of a high computational demand. To run the controller in real-time, the sampling-based optimization is performed in parallel on a graphics processing unit onboard the UAV. We propose an approach to the simulation of the nonlinear system which respects low-level constraints, while also able to dynamically handle obstacle avoidance, and prove that our methods are able to run in real-time without the need for external computers. The MPPI controller is compared to MPC and SE(3) controllers on the reference tracking task, showing a comparable performance. We demonstrate the viability of the proposed method in multiple simulation and real-world experiments, tracking a reference at up to 44 km/h and acceleration close to 20 m/s^2, while still being able to avoid obstacles. To the best of our knowledge, this is the first method to demonstrate an MPPI-based approach in real flight.
Read more7/16/2024
0
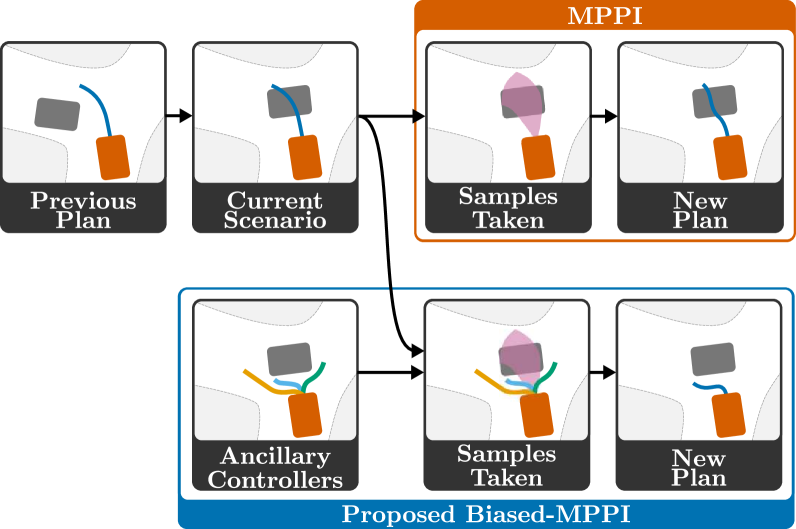
Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
Elia Trevisan, Javier Alonso-Mora
Motion planning for autonomous robots in dynamic environments poses numerous challenges due to uncertainties in the robot's dynamics and interaction with other agents. Sampling-based MPC approaches, such as Model Predictive Path Integral (MPPI) control, have shown promise in addressing these complex motion planning problems. However, the performance of MPPI relies heavily on the choice of sampling distribution. Existing literature often uses the previously computed input sequence as the mean of a Gaussian distribution for sampling, leading to potential failures and local minima. In this paper, we propose a novel derivation of MPPI that allows for arbitrary sampling distributions to enhance efficiency, robustness, and convergence while alleviating the problem of local minima. We present an efficient importance sampling scheme that combines classical and learning-based ancillary controllers simultaneously, resulting in more informative sampling and control fusion. Several simulated and real-world demonstrate the validity of our approach.
Read more5/7/2024
🎲
0
Towards a Safe Real-Time Motion Planning Framework for Autonomous Driving Systems: An MPPI Approach
Mehdi Testouri, Gamal Elghazaly, Raphael Frank
Planning safe trajectories in Autonomous Driving Systems (ADS) is a complex problem to solve in real-time. The main challenge to solve this problem arises from the various conditions and constraints imposed by road geometry, semantics and traffic rules, as well as the presence of dynamic agents. Recently, Model Predictive Path Integral (MPPI) has shown to be an effective framework for optimal motion planning and control in robot navigation in unstructured and highly uncertain environments. In this paper, we formulate the motion planning problem in ADS as a nonlinear stochastic dynamic optimization problem that can be solved using an MPPI strategy. The main technical contribution of this work is a method to handle obstacles within the MPPI formulation safely. In this method, obstacles are approximated by circles that can be easily integrated into the MPPI cost formulation while considering safety margins. The proposed MPPI framework has been efficiently implemented in our autonomous vehicle and experimentally validated using three different primitive scenarios. Experimental results show that generated trajectories are safe, feasible and perfectly achieve the planning objective. The video results as well as the open-source implementation are available at: https://gitlab.uni.lu/360lab-public/mppi
Read more5/7/2024
0
Multi-Model Predictive Attitude Control of Quadrotors
Mohammadreza Izadi, Zeinab Shayan, Reza Faieghi
This paper introduces a new multi-model predictive control (MMPC) method for quadrotor attitude control with performance nearly on par with nonlinear model predictive control (NMPC) and computational efficiency similar to linear model predictive control (LMPC). Conventional NMPC, while effective, is computationally intensive, especially for attitude control that needs a high refresh rate. Conversely, LMPC offers computational advantages but suffers from poor performance and local stability. Our approach relies on multiple linear models of attitude dynamics, each accompanied by a linear model predictive controller, dynamically switching between them given flight conditions. We leverage gap metric analysis to minimize the number of models required to accurately predict the vehicle behavior in various conditions and incorporate a soft switching mechanism to ensure system stability during controller transitions. Our results show that with just 15 models, the vehicle attitude can be accurately controlled across various set points. Comparative evaluations with existing controllers such as incremental nonlinear dynamic inversion, sliding mode control, LMPC, and NMPC reveal that our approach closely matches the effectiveness of NMPC, outperforming other methods, with a running time comparable to LMPC.
Read more6/26/2024