BEATLE -- Self-Reconfigurable Aerial Robot: Design, Control and Experimental Validation
2404.09153
0
0
Abstract
Modular self-reconfigurable robots (MSRRs) offer enhanced task flexibility by constructing various structures suitable for each task. However, conventional terrestrial MSRRs equipped with wheels face critical challenges, including limitations in the size of constructible structures and system robustness due to elevated wrench loads applied to each module. In this work, we introduce an Aerial MSRR (A-MSRR) system named BEATLE, capable of merging and separating in-flight. BEATLE can merge without applying wrench loads to adjacent modules, thereby expanding the scalability and robustness of conventional terrestrial MSRRs. In this article, we propose a system configuration for BEATLE, including mechanical design, a control framework for multi-connected flight, and a motion planner for reconfiguration motion. The design of a docking mechanism and housing structure aims to balance the durability of the constructed structure with ease of separation. Furthermore, the proposed flight control framework achieves stable multi-connected flight based on contact wrench control. Moreover, the proposed motion planner based on a finite state machine (FSM) achieves precise and robust reconfiguration motion. We also introduce the actual implementation of the prototype and validate the robustness and scalability of the proposed system design through experiments and simulation studies.
Create account to get full access
Overview
- Presents the design, control, and experimental validation of a self-reconfigurable aerial robot called BEATLE
- Highlights the robot's ability to change its configuration to adapt to different environments and tasks
- Demonstrates the robot's capabilities through various experiments, including trajectory tracking, contact wrench control, and self-reconfiguration
Plain English Explanation
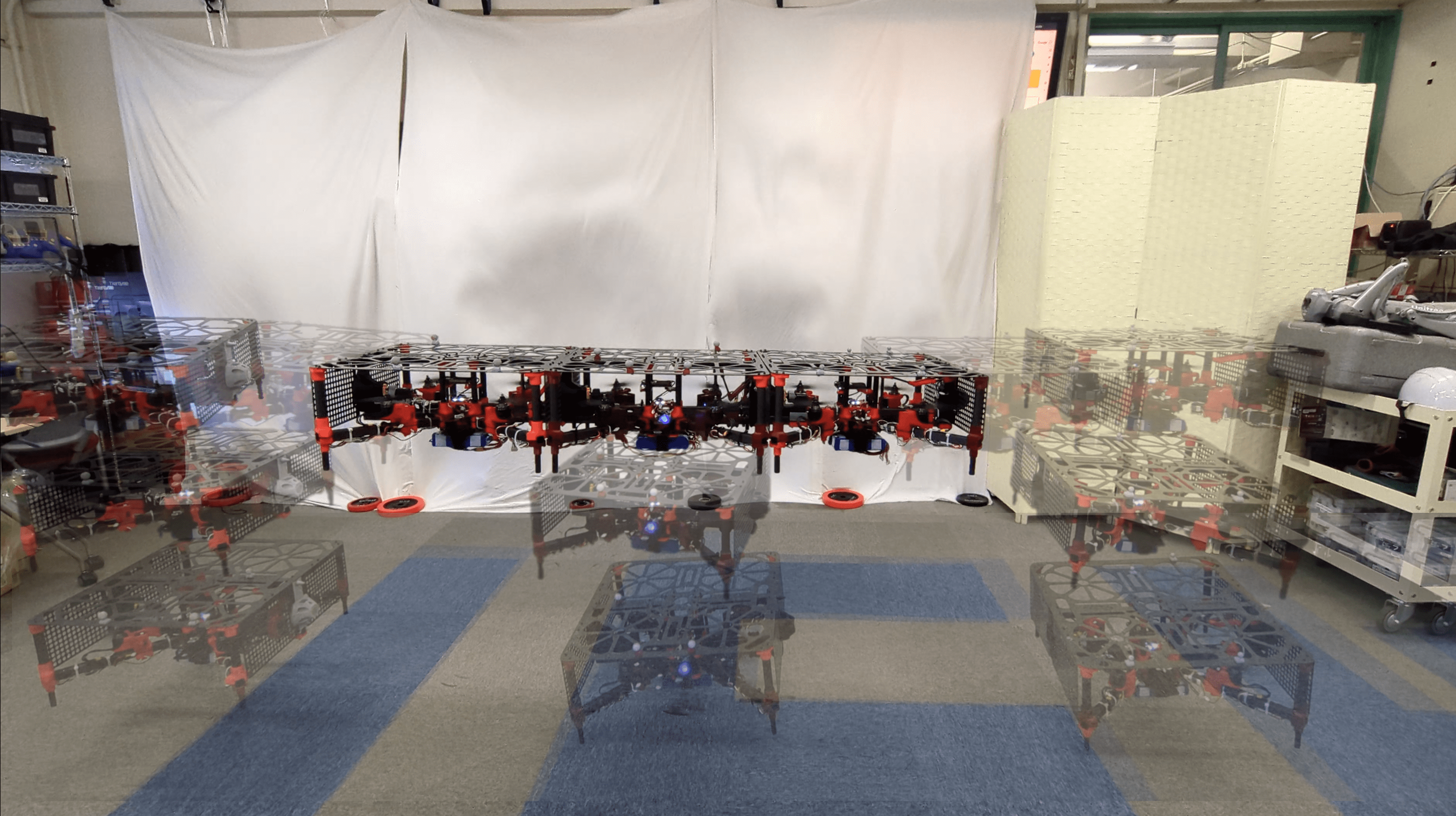
The research paper describes the development of a unique aerial robot called BEATLE that can reconfigure itself to adapt to different environments and tasks. Unlike traditional aerial robots that have a fixed structure, BEATLE is designed to be modular and able to change its shape and capabilities as needed.
The paper outlines the mechanical design of BEATLE, which includes multiple interchangeable propulsion units that can be arranged in various configurations. This allows BEATLE to perform a wide range of tasks, from stable hovering to navigating tight spaces and even making physical contact with its surroundings. The researchers also developed advanced control algorithms to ensure BEATLE can maintain precise control and stability during these reconfiguration processes.
Through a series of experiments, the paper demonstrates BEATLE's impressive capabilities. The robot is shown to accurately track complex trajectories, precisely control the forces it exerts on its environment, and seamlessly transition between different configurations. These abilities could make BEATLE useful for a variety of applications, such as link to "Experimental System Design for Active Fault-Tolerant Quadrotor", link to "Learning to Fly in Seconds", or link to "UAV-Enabled Collaborative Beamforming via Multi-Agent", where a reconfigurable aerial robot could be valuable.
Technical Explanation
The paper presents the design, control, and experimental validation of BEATLE, a self-reconfigurable aerial robot. BEATLE is a modular platform that can change its configuration to adapt to different environments and tasks. The robot's mechanical design includes multiple interchangeable propulsion units that can be arranged in various configurations, allowing it to perform a wide range of capabilities, from stable hovering to making physical contact with its surroundings.
The researchers developed advanced control algorithms to ensure BEATLE can maintain precise control and stability during the reconfiguration process. These control methods include link to "Agile and Versatile Bipedal Robot Tracking Control Through" and link to "Stiffness-Tuneable Limb Segment, Flexible Spine, Malleable" techniques to enable the robot to precisely track complex trajectories and control the forces it exerts on its environment.
The paper presents several experiments that demonstrate BEATLE's capabilities, including trajectory tracking, contact wrench control, and self-reconfiguration. The results show the robot's ability to accurately follow complex trajectories, precisely control the forces it applies to its surroundings, and seamlessly transition between different configurations.
Critical Analysis
The paper provides a comprehensive and well-designed study of the BEATLE self-reconfigurable aerial robot. The researchers have addressed several key challenges in the development of such a system, including the mechanical design, control algorithms, and experimental validation.
One potential limitation of the research is the lack of real-world testing in more complex and unstructured environments. The experiments presented in the paper were conducted in a controlled laboratory setting, which may not fully capture the challenges that BEATLE would face in practical applications. Further research is needed to explore the robot's performance and robustness in more realistic scenarios.
Additionally, the paper does not provide a detailed analysis of the energy efficiency and power consumption of BEATLE during its various reconfiguration and operation modes. This information would be valuable in understanding the practical limitations and trade-offs of the system.
Overall, the research presented in this paper represents a significant advancement in the field of reconfigurable aerial robotics. The BEATLE system demonstrates the potential of such technologies to adapt to diverse environments and tasks, which could lead to a wide range of practical applications. Further development and testing in more realistic scenarios would be valuable to assess the true capabilities and limitations of this innovative aerial robot.
Conclusion
This research paper introduces BEATLE, a self-reconfigurable aerial robot that can adapt its structure and capabilities to different environments and tasks. The paper outlines the mechanical design, control algorithms, and experimental validation of the BEATLE system, showcasing its ability to precisely track complex trajectories, control the forces it exerts on its surroundings, and seamlessly transition between various configurations.
The development of BEATLE represents an important step forward in the field of reconfigurable aerial robotics, with potential applications in a wide range of domains, from link to "Experimental System Design for Active Fault-Tolerant Quadrotor" to link to "Learning to Fly in Seconds" and link to "UAV-Enabled Collaborative Beamforming via Multi-Agent". While further research is needed to explore the system's performance in more realistic environments, the BEATLE project represents an exciting and innovative step towards more adaptable and versatile aerial robotic platforms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
Modular Multi-Rotors: From Quadrotors to Fully-Actuated Aerial Vehicles
Jiawei Xu, Diego S. D'Antonio, David Salda~na
0
0
Traditional aerial vehicles have specific characteristics to perform specific tasks but designing a versatile vehicle that can adapt depending on the task is still a challenge. Based on modularity, we propose an aerial robotic system that can increase its payload capacity and actuated degrees of freedom by reconfiguring heterogeneous modules to adapt to different task specifications. The system consists of cuboid modules propelled by quadrotors with tilted rotors. We present two module designs with different actuation properties. By assembling different types of modules, H-ModQuad can increase its actuated degrees of freedom from 4 to 5 and 6 depending on its configuration. By extending the concept of actuation ellipsoids, we find the body frame of a vehicle with which the controller can maximize the maximum thrust. We use polytopes to represent the actuation capability of the vehicles and examine them against task requirements. We derive the modular vehicles' dynamics and propose a general control strategy that applies for all possible numbers of actuated degrees of freedom. The design is validated with simulations and experiments using actual robots, showing that the modular vehicles provide different actuation properties.
5/2/2024

Crash Landing onto you: Untethered Soft Aerial Robots for Safe Environmental Interaction, Sensing, and Perching
Pham Huy Nguyen
0
0
There are various desired capabilities to create aerial forest-traversing robots capable of monitoring both biological and abiotic data. The features range from multi-functionality, robustness, and adaptability. These robots have to weather turbulent winds and various obstacles such as forest flora and wildlife thus amplifying the complexity of operating in such uncertain environments. The key for successful data collection is the flexibility to intermittently move from tree-to-tree, in order to perch at vantage locations for elongated time. This effort to perch not only reduces the disturbance caused by multi-rotor systems during data collection, but also allows the system to rest and recharge for longer outdoor missions. Current systems feature the addition of perching modules that increase the aerial robots' weight and reduce the drone's overall endurance. Thus in our work, the key questions currently studied are: How do we develop a single robot capable of metamorphosing its body for multi-modal flight and dynamic perching?, How do we detect and land on perchable objects robustly and dynamically?, and What important spatial-temporal data is important for us to collect?
5/27/2024

Reconfiguration Algorithms for Cubic Modular Robots with Realistic Movement Constraints
NASA Space Robots Team, Josh Brunner, Kenneth C. Cheung, Erik D. Demaine, Jenny Diomidova, Christine Gregg, Della H. Hendrickson, Irina Kostitsyna
0
0
We introduce and analyze a model for self-reconfigurable robots made up of unit-cube modules. Compared to past models, our model aims to newly capture two important practical aspects of real-world robots. First, modules often do not occupy an exact unit cube, but rather have features like bumps extending outside the allotted space so that modules can interlock. Thus, for example, our model forbids modules from squeezing in between two other modules that are one unit distance apart. Second, our model captures the practical scenario of many passive modules assembled by a single robot, instead of requiring all modules to be able to move on their own. We prove two universality results. First, with a supply of auxiliary modules, we show that any connected polycube structure can be constructed by a carefully aligned plane sweep. Second, without additional modules, we show how to construct any structure for which a natural notion of external feature size is at least a constant; this property largely consolidates forbidden-pattern properties used in previous works on reconfigurable modular robots.
5/27/2024
Modular, Resilient, and Scalable System Design Approaches -- Lessons learned in the years after DARPA Subterranean Challenge
Prasanna Sriganesh, James Maier, Adam Johnson, Burhanuddin Shirose, Rohan Chandrasekar, Charles Noren, Joshua Spisak, Ryan Darnley, Bhaskar Vundurthy, Matthew Travers
0
0
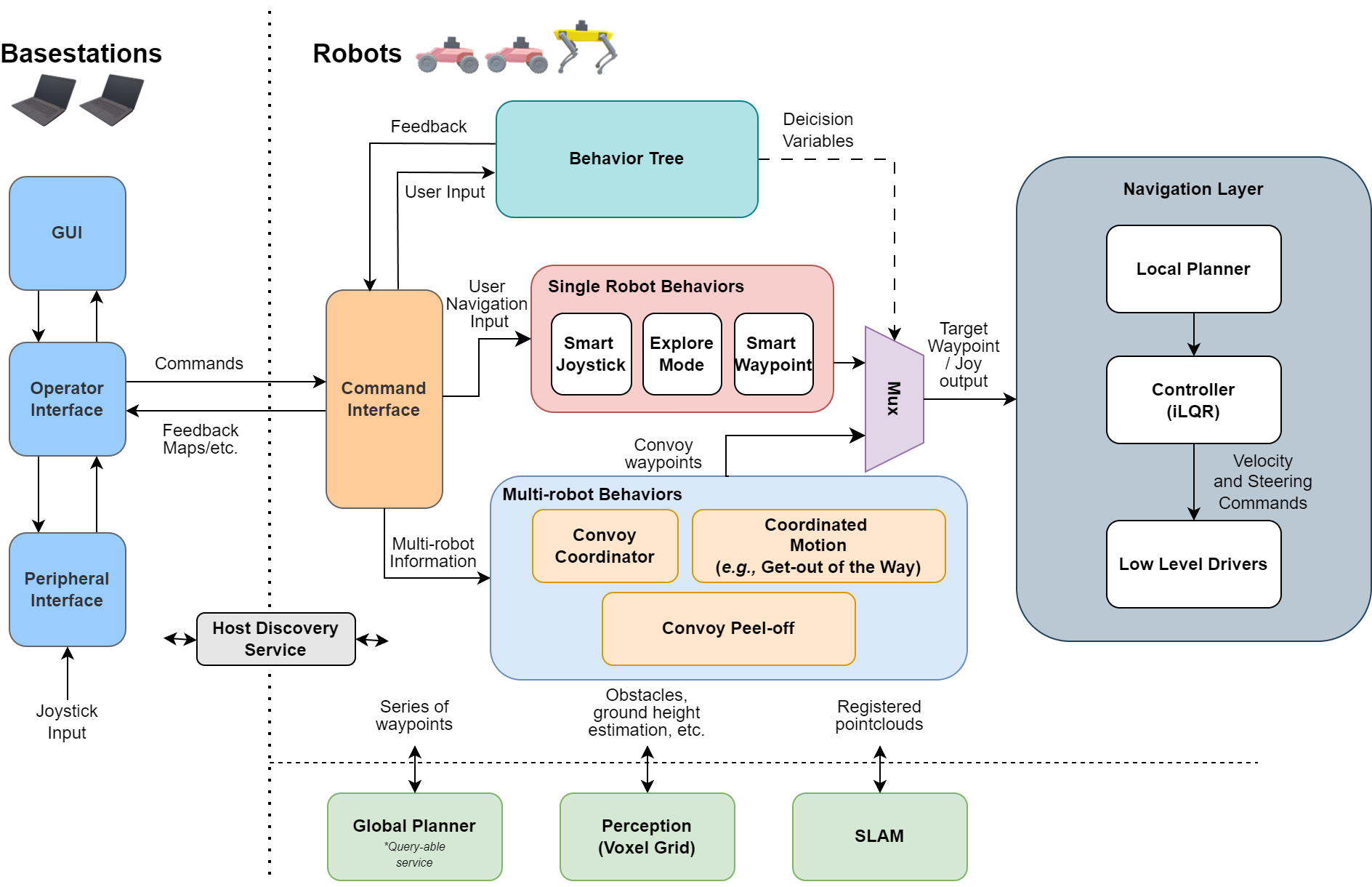
Field robotics applications, such as search and rescue, involve robots operating in large, unknown areas. These environments present unique challenges that compound the difficulties faced by a robot operator. The use of multi-robot teams, assisted by carefully designed autonomy, help reduce operator workload and allow the operator to effectively coordinate robot capabilities. In this work, we present a system architecture designed to optimize both robot autonomy and the operator experience in multi-robot scenarios. Drawing on lessons learned from our team's participation in the DARPA SubT Challenge, our architecture emphasizes modularity and interoperability. We empower the operator by allowing for adjustable levels of autonomy (sliding mode autonomy). We enhance the operator experience by using intuitive, adaptive interfaces that suggest context-aware actions to simplify control. Finally, we describe how the proposed architecture enables streamlined development of new capabilities for effective deployment of robot autonomy in the field.
4/30/2024