Motion Planning under Uncertainty: Integrating Learning-Based Multi-Modal Predictors into Branch Model Predictive Control
2405.03470
0
0

Abstract
In complex traffic environments, autonomous vehicles face multi-modal uncertainty about other agents' future behavior. To address this, recent advancements in learningbased motion predictors output multi-modal predictions. We present our novel framework that leverages Branch Model Predictive Control(BMPC) to account for these predictions. The framework includes an online scenario-selection process guided by topology and collision risk criteria. This efficiently selects a minimal set of predictions, rendering the BMPC realtime capable. Additionally, we introduce an adaptive decision postponing strategy that delays the planner's commitment to a single scenario until the uncertainty is resolved. Our comprehensive evaluations in traffic intersection and random highway merging scenarios demonstrate enhanced comfort and safety through our method.
Create account to get full access
Overview
- This paper presents a novel motion planning approach that integrates learning-based multi-modal predictors into a Branch Model Predictive Control (BMPC) framework to navigate under uncertainty.
- The key idea is to leverage machine learning models to predict the future behavior of surrounding agents and use this information to plan optimal trajectories for the ego vehicle.
- The authors demonstrate the effectiveness of their approach through simulations in complex urban driving scenarios with heterogeneous traffic.
Plain English Explanation
The paper focuses on the challenge of motion planning for autonomous vehicles navigating in uncertain environments, such as busy city streets with a mix of cars, pedestrians, and other road users. Traditional motion planning approaches often rely on simplified models that struggle to capture the complex, unpredictable behavior of humans in the scene.
To address this, the researchers propose integrating advanced machine learning models into a motion planning framework called Branch Model Predictive Control (BMPC). These learning-based models can predict the likely future actions of surrounding agents, such as where a pedestrian might walk or how a nearby car might move. By incorporating this predictive information, the motion planner can generate trajectories for the autonomous vehicle that are more robust to the uncertainty in the environment.
Technical Explanation
The core of the proposed approach is the integration of learning-based multi-modal predictors into a Branch Model Predictive Control (BMPC) framework for motion planning. The authors leverage deep neural networks to predict the future behavior of different types of road users, such as cars, pedestrians, and cyclists, based on their current state and contextual cues.
These predictions are then used within the BMPC planner to explore multiple potential future scenarios and select the optimal trajectory for the ego vehicle. The BMPC approach iteratively evaluates a tree of possible future trajectories, pruning branches that are predicted to lead to unsafe or undesirable outcomes.
[The authors evaluate their approach on simulated urban driving scenarios with heterogeneous traffic, including highway discretionary lane changes and interactions between autonomous and human-driven vehicles. The results demonstrate that the integrated learning-based BMPC planner can navigate these complex environments more effectively than traditional methods, leading to safer and more efficient motion plans.](https://aimodels.fyi/papers/arxiv/learning-based-modeling-human-autonomous-vehicle-interaction)
Critical Analysis
The paper presents a promising approach for improving motion planning under uncertainty by leveraging advanced machine learning models. The authors have carefully designed their experiments to evaluate the performance of their approach in realistic, complex driving scenarios.
However, the paper does not address some important limitations and potential concerns. For example, the reliance on accurate predictions from the machine learning models could be a vulnerability, as these models may not always be perfectly reliable, especially in edge cases or novel situations. The authors could have discussed strategies for mitigating the impact of such prediction errors on the overall motion planning performance.
Additionally, the computational complexity of the BMPC approach could be a concern, especially for real-time applications. The authors should have provided more details on the runtime performance and scalability of their method, as well as potential techniques for improving efficiency.
Finally, the paper does not discuss the ethical implications of deploying such autonomous driving systems in the real world, such as the potential for bias in the underlying machine learning models or the challenges of ensuring the safety and accountability of these systems.
Conclusion
This paper presents a novel motion planning approach that integrates learning-based multi-modal predictors into a Branch Model Predictive Control framework to navigate under uncertainty. The key innovation is the use of advanced machine learning models to predict the future behavior of surrounding agents, which is then leveraged by the motion planner to generate more robust and efficient trajectories for the ego vehicle.
The authors demonstrate the effectiveness of their approach through simulations in complex urban driving scenarios with heterogeneous traffic, showing that it can outperform traditional planning methods. While the paper highlights the potential of this approach, it also raises important questions about the reliability, efficiency, and ethical considerations of deploying such systems in the real world, which the authors could have addressed more thoroughly.
Overall, this work represents a significant step forward in the field of autonomous vehicle motion planning and highlights the promise of integrating machine learning techniques to tackle the challenges of navigating in uncertain and dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Scalable Multi-modal Model Predictive Control via Duality-based Interaction Predictions
Hansung Kim, Siddharth H. Nair, Francesco Borrelli
0
0
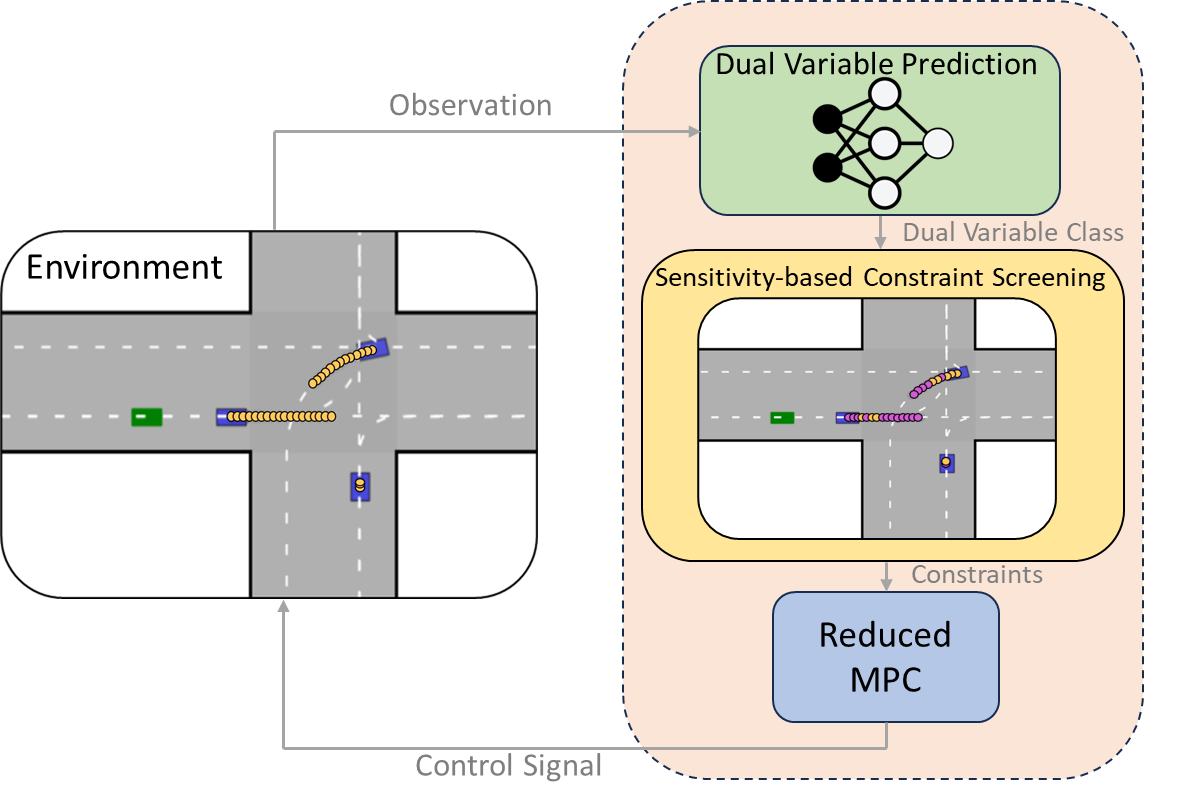
We propose a hierarchical architecture designed for scalable real-time Model Predictive Control (MPC) in complex, multi-modal traffic scenarios. This architecture comprises two key components: 1) RAID-Net, a novel attention-based Recurrent Neural Network that predicts relevant interactions along the MPC prediction horizon between the autonomous vehicle and the surrounding vehicles using Lagrangian duality, and 2) a reduced Stochastic MPC problem that eliminates irrelevant collision avoidance constraints, enhancing computational efficiency. Our approach is demonstrated in a simulated traffic intersection with interactive surrounding vehicles, showcasing a 12x speed-up in solving the motion planning problem. A video demonstrating the proposed architecture in multiple complex traffic scenarios can be found here: https://youtu.be/-pRiOnPb9_c. GitHub: https://github.com/MPC-Berkeley/hmpc_raidnet
6/4/2024
RACP: Risk-Aware Contingency Planning with Multi-Modal Predictions
Khaled A. Mustafa, Daniel Jarne Ornia, Jens Kober, Javier Alonso-Mora
0
0
For an autonomous vehicle to operate reliably within real-world traffic scenarios, it is imperative to assess the repercussions of its prospective actions by anticipating the uncertain intentions exhibited by other participants in the traffic environment. Driven by the pronounced multi-modal nature of human driving behavior, this paper presents an approach that leverages Bayesian beliefs over the distribution of potential policies of other road users to construct a novel risk-aware probabilistic motion planning framework. In particular, we propose a novel contingency planner that outputs long-term contingent plans conditioned on multiple possible intents for other actors in the traffic scene. The Bayesian belief is incorporated into the optimization cost function to influence the behavior of the short-term plan based on the likelihood of other agents' policies. Furthermore, a probabilistic risk metric is employed to fine-tune the balance between efficiency and robustness. Through a series of closed-loop safety-critical simulated traffic scenarios shared with human-driven vehicles, we demonstrate the practical efficacy of our proposed approach that can handle multi-vehicle scenarios.
6/21/2024

Highway Discretionary Lane-change Decision and Control Using Model Predictive Control
Zishun Zheng, Yihan Wang, Yuan Lin
0
0
To enable autonomous vehicles to perform discretionary lane change amidst the random traffic flow on highways, this paper introduces a decision-making and control method for vehicle lane change based on Model Predictive Control (MPC). This approach divides the driving control of vehicles on highways into two parts: lane-change decision and lane-change control, both of which are solved using the MPC method. In the lanechange decision module, the minimum driving costs for each lane are computed and compared by solving the MPC problem to make lane-change decisions. In the lane-change control module, a dynamic bicycle model is incorporated, and a multi-objective cost function is designed to obtain the optimal control inputs for the lane-change process. Additionally, A long-short term memory (LSTM) model is used to predict the trajectories of surrounding vehicles for both the MPC decision and control modules. The proposed lane-change decision and control method is simulated and validated in a driving simulator under random highway traffic conditions.
4/4/2024

Learning Online Belief Prediction for Efficient POMDP Planning in Autonomous Driving
Zhiyu Huang, Chen Tang, Chen Lv, Masayoshi Tomizuka, Wei Zhan
0
0
Effective decision-making in autonomous driving relies on accurate inference of other traffic agents' future behaviors. To achieve this, we propose an online belief-update-based behavior prediction model and an efficient planner for Partially Observable Markov Decision Processes (POMDPs). We develop a Transformer-based prediction model, enhanced with a recurrent neural memory model, to dynamically update latent belief state and infer the intentions of other agents. The model can also integrate the ego vehicle's intentions to reflect closed-loop interactions among agents, and it learns from both offline data and online interactions. For planning, we employ a Monte-Carlo Tree Search (MCTS) planner with macro actions, which reduces computational complexity by searching over temporally extended action steps. Inside the MCTS planner, we use predicted long-term multi-modal trajectories to approximate future updates, which eliminates iterative belief updating and improves the running efficiency. Our approach also incorporates deep Q-learning (DQN) as a search prior, which significantly improves the performance of the MCTS planner. Experimental results from simulated environments validate the effectiveness of our proposed method. The online belief update model can significantly enhance the accuracy and temporal consistency of predictions, leading to improved decision-making performance. Employing DQN as a search prior in the MCTS planner considerably boosts its performance and outperforms an imitation learning-based prior. Additionally, we show that the MCTS planning with macro actions substantially outperforms the vanilla method in terms of performance and efficiency.
6/19/2024