RACP: Risk-Aware Contingency Planning with Multi-Modal Predictions
2402.17387
0
0
Abstract
For an autonomous vehicle to operate reliably within real-world traffic scenarios, it is imperative to assess the repercussions of its prospective actions by anticipating the uncertain intentions exhibited by other participants in the traffic environment. Driven by the pronounced multi-modal nature of human driving behavior, this paper presents an approach that leverages Bayesian beliefs over the distribution of potential policies of other road users to construct a novel risk-aware probabilistic motion planning framework. In particular, we propose a novel contingency planner that outputs long-term contingent plans conditioned on multiple possible intents for other actors in the traffic scene. The Bayesian belief is incorporated into the optimization cost function to influence the behavior of the short-term plan based on the likelihood of other agents' policies. Furthermore, a probabilistic risk metric is employed to fine-tune the balance between efficiency and robustness. Through a series of closed-loop safety-critical simulated traffic scenarios shared with human-driven vehicles, we demonstrate the practical efficacy of our proposed approach that can handle multi-vehicle scenarios.
Create account to get full access
Overview
- This research paper presents a new approach called Risk-Aware Contingency Planning (RACP) for planning under uncertainty, with a focus on autonomous vehicle applications.
- RACP integrates multi-modal predictions to anticipate potential future outcomes and plan accordingly, aiming to develop risk-aware and flexible plans.
- The paper explores techniques for modeling and reasoning about uncertainty, generating contingency plans, and making risk-aware decisions.
Plain English Explanation
The main idea behind this research is to help autonomous vehicles navigate the world more safely and effectively, even when faced with uncertain or unpredictable situations. Autonomous vehicles need to be able to anticipate and plan for a variety of possible future scenarios, not just a single predicted outcome.
The RACP approach uses "multi-modal predictions" - meaning it considers multiple plausible future scenarios, rather than just one. This allows the vehicle to generate contingency plans and make decisions that take potential risks into account.
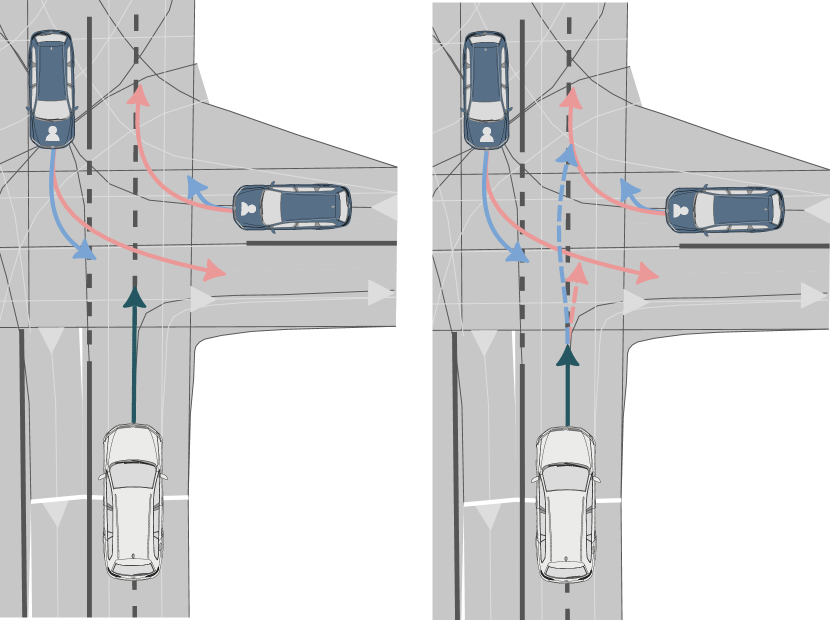
For example, if an autonomous vehicle is approaching an intersection, it needs to be prepared for a range of possible events - the light might turn red, a pedestrian might suddenly cross the street, another vehicle might run the red light, etc. RACP would allow the vehicle to anticipate these different possibilities and have backup plans ready, rather than just assuming everything will go as expected.
The research also explores techniques for efficiently modeling and reasoning about this uncertainty, so the vehicle can quickly assess risks and adapt its plans accordingly. This is key for autonomous vehicles to operate safely and reliably in the real world, where unexpected events are common.
Technical Explanation
The RACP framework consists of several key components:
-
Multi-Modal Prediction: The system uses a learned predictive model to generate a diverse set of plausible future trajectories, rather than a single prediction. This captures the inherent uncertainty in the environment.
-
Contingency Plan Generation: Based on the multi-modal predictions, the system generates a set of contingency plans that account for different possible future scenarios. These plans specify how the vehicle should react and adapt its behavior accordingly.
-
Risk-Aware Decision Making: The system evaluates the generated contingency plans and selects the one that balances the trade-off between risk and reward. This learned risk-awareness is crucial for making safe and effective decisions in uncertain environments.
The authors demonstrate the effectiveness of RACP through simulations and real-world experiments with autonomous vehicles navigating complex urban environments. The results show that RACP outperforms baseline approaches in terms of safety, flexibility, and overall task performance.
Critical Analysis
The paper presents a thoughtful and comprehensive approach to planning under uncertainty, which is a critical challenge for autonomous vehicles and other systems operating in dynamic, unpredictable environments. The authors acknowledge several limitations and areas for future work, such as the need to further improve the efficiency and scalability of the underlying predictive models and planning algorithms.
One potential concern is the reliance on learned predictive models, which can be susceptible to biases or errors in the training data. The authors mention the need to [further explore techniques for learning robust, adaptable world models that can generalize to a wide range of scenarios.
Additionally, the paper focuses primarily on the technical aspects of the RACP framework, with less discussion of the broader societal implications and ethical considerations of deploying such systems in the real world. As autonomous vehicles become more prevalent, it will be important to carefully consider issues of safety, accountability, and fairness.
Conclusion
This research introduces a promising approach called RACP that addresses the challenge of planning under uncertainty for autonomous vehicles and other systems. By considering multiple possible future scenarios and generating contingency plans accordingly, RACP aims to enable more flexible, risk-aware, and ultimately safer decision-making in complex, unpredictable environments.
The technical contributions of this work, including the multi-modal prediction and risk-aware planning components, represent an important step forward in the field of autonomous systems. As the authors note, there is still much work to be done to further refine and scale these techniques, but this research provides a solid foundation for continued progress in this critical area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Motion Planning under Uncertainty: Integrating Learning-Based Multi-Modal Predictors into Branch Model Predictive Control
Mohamed-Khalil Bouzidi, Bojan Derajic, Daniel Goehring, Joerg Reichardt
0
0
In complex traffic environments, autonomous vehicles face multi-modal uncertainty about other agents' future behavior. To address this, recent advancements in learningbased motion predictors output multi-modal predictions. We present our novel framework that leverages Branch Model Predictive Control(BMPC) to account for these predictions. The framework includes an online scenario-selection process guided by topology and collision risk criteria. This efficiently selects a minimal set of predictions, rendering the BMPC realtime capable. Additionally, we introduce an adaptive decision postponing strategy that delays the planner's commitment to a single scenario until the uncertainty is resolved. Our comprehensive evaluations in traffic intersection and random highway merging scenarios demonstrate enhanced comfort and safety through our method.
5/7/2024
Scalable Multi-modal Model Predictive Control via Duality-based Interaction Predictions
Hansung Kim, Siddharth H. Nair, Francesco Borrelli
0
0
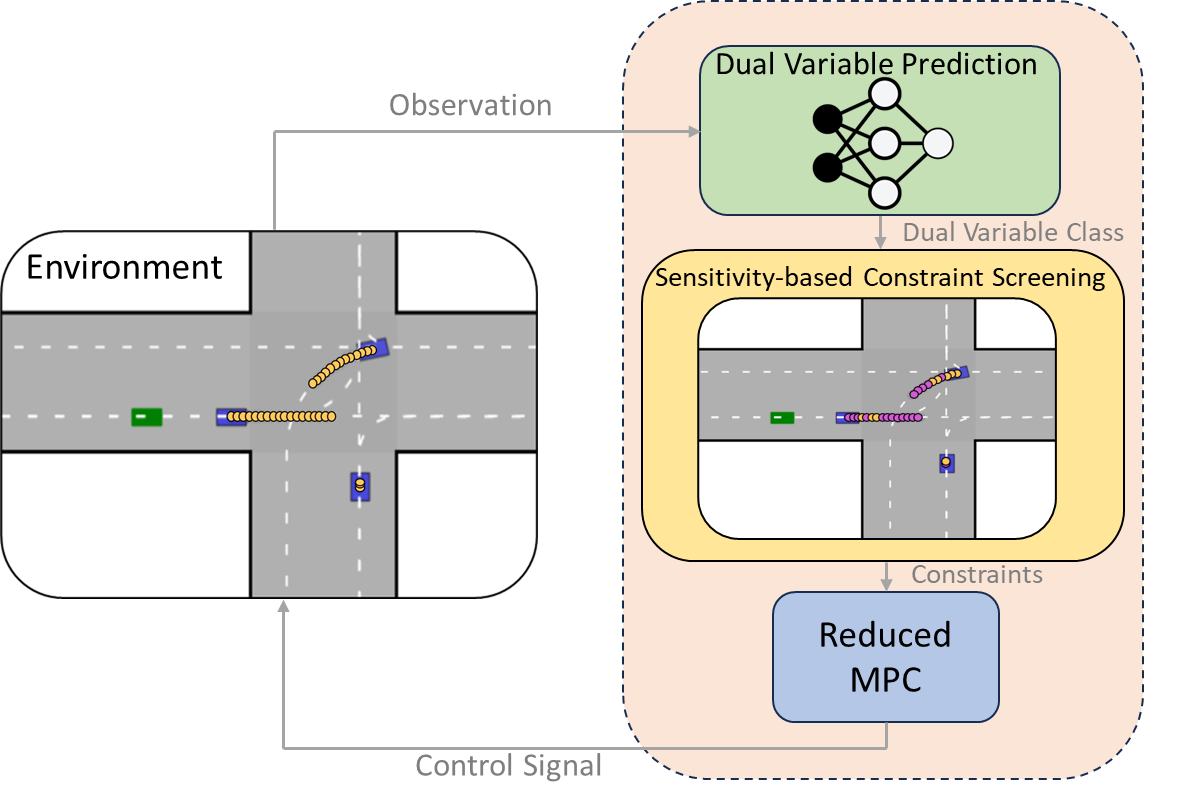
We propose a hierarchical architecture designed for scalable real-time Model Predictive Control (MPC) in complex, multi-modal traffic scenarios. This architecture comprises two key components: 1) RAID-Net, a novel attention-based Recurrent Neural Network that predicts relevant interactions along the MPC prediction horizon between the autonomous vehicle and the surrounding vehicles using Lagrangian duality, and 2) a reduced Stochastic MPC problem that eliminates irrelevant collision avoidance constraints, enhancing computational efficiency. Our approach is demonstrated in a simulated traffic intersection with interactive surrounding vehicles, showcasing a 12x speed-up in solving the motion planning problem. A video demonstrating the proposed architecture in multiple complex traffic scenarios can be found here: https://youtu.be/-pRiOnPb9_c. GitHub: https://github.com/MPC-Berkeley/hmpc_raidnet
6/4/2024

Hierarchical Learned Risk-Aware Planning Framework for Human Driving Modeling
Nathan Ludlow, Yiwei Lyu, John Dolan
0
0
This paper presents a novel approach to modeling human driving behavior, designed for use in evaluating autonomous vehicle control systems in a simulation environments. Our methodology leverages a hierarchical forward-looking, risk-aware estimation framework with learned parameters to generate human-like driving trajectories, accommodating multiple driver levels determined by model parameters. This approach is grounded in multimodal trajectory prediction, using a deep neural network with LSTM-based social pooling to predict the trajectories of surrounding vehicles. These trajectories are used to compute forward-looking risk assessments along the ego vehicle's path, guiding its navigation. Our method aims to replicate human driving behaviors by learning parameters that emulate human decision-making during driving. We ensure that our model exhibits robust generalization capabilities by conducting simulations, employing real-world driving data to validate the accuracy of our approach in modeling human behavior. The results reveal that our model effectively captures human behavior, showcasing its versatility in modeling human drivers in diverse highway scenarios.
5/13/2024

Learning Online Belief Prediction for Efficient POMDP Planning in Autonomous Driving
Zhiyu Huang, Chen Tang, Chen Lv, Masayoshi Tomizuka, Wei Zhan
0
0
Effective decision-making in autonomous driving relies on accurate inference of other traffic agents' future behaviors. To achieve this, we propose an online belief-update-based behavior prediction model and an efficient planner for Partially Observable Markov Decision Processes (POMDPs). We develop a Transformer-based prediction model, enhanced with a recurrent neural memory model, to dynamically update latent belief state and infer the intentions of other agents. The model can also integrate the ego vehicle's intentions to reflect closed-loop interactions among agents, and it learns from both offline data and online interactions. For planning, we employ a Monte-Carlo Tree Search (MCTS) planner with macro actions, which reduces computational complexity by searching over temporally extended action steps. Inside the MCTS planner, we use predicted long-term multi-modal trajectories to approximate future updates, which eliminates iterative belief updating and improves the running efficiency. Our approach also incorporates deep Q-learning (DQN) as a search prior, which significantly improves the performance of the MCTS planner. Experimental results from simulated environments validate the effectiveness of our proposed method. The online belief update model can significantly enhance the accuracy and temporal consistency of predictions, leading to improved decision-making performance. Employing DQN as a search prior in the MCTS planner considerably boosts its performance and outperforms an imitation learning-based prior. Additionally, we show that the MCTS planning with macro actions substantially outperforms the vanilla method in terms of performance and efficiency.
6/19/2024