Expectable Motion Unit: Avoiding Hazards From Human Involuntary Motions in Human-Robot Interaction

0
🏷️
Sign in to get full access
Overview
- This paper proposes a new system called the Expectable Motion Unit (EMU) that aims to ensure human safety in human-robot interaction (HRI) by preventing unintended, sudden movements from humans.
- The researchers developed a model of involuntary human motion (IM) based on an experiment with 29 participants, which shows the relationship between robot velocity, robot-human distance, and the likelihood of IM occurrence.
- The EMU uses this model to limit the robot's motion in real-time to keep the probability of IM below a safe threshold, integrating both physical and psychological safety factors.
- A validation experiment showed the EMU successfully prevented human IM in 5 out of 6 cases.
Plain English Explanation
When robots and humans work together, it's important to keep people physically safe. Typically, control systems focus on the robot's movements to avoid collisions or injuries. However, this paper points out that humans can also make sudden, uncontrolled movements - called "involuntary motions" (IM) - due to being startled or surprised by the robot's actions, even if the robot is behaving "safely" from a physical perspective.
To address this, the researchers developed a new system called the Expectable Motion Unit (EMU) that can predict when a human is likely to make an IM based on factors like the robot's speed and its distance from the human. The EMU then adjusts the robot's motion in real-time to keep the probability of an IM low, integrating both the physical and psychological aspects of human safety.
The researchers tested this system through an experiment and found it successfully prevented unintended human movements in 5 out of 6 cases. This suggests the EMU could be an effective way to improve safety in human-robot collaboration environments, like factories or assisted living homes, where robots and people work side-by-side.
Technical Explanation
The researchers first conducted an experiment with 29 participants to model the occurrence of involuntary human motions (IM) in response to robot movements. They measured factors like robot velocity, robot-human distance, and the frequency of IM events. This data was used to establish a mapping between these variables and the probability of IM occurrence.
The Expectable Motion Unit (EMU) then uses this IM probability model to plan the robot's motions in real-time. If the EMU detects that the robot's current velocity and distance to the human would result in an unacceptably high IM probability, it automatically adjusts the robot's speed to keep the IM risk below a safe threshold. This allows the robot to complete its tasks while still prioritizing human psychological safety.
The EMU is integrated into a broader safety framework that considers both physical and psychological factors. This holistic approach aims to ensure safe human-robot interaction by preventing not just physical collisions, but also unintended human reactions that could jeopardize safety.
A validation experiment demonstrated the EMU's effectiveness, successfully avoiding human IM in 5 out of 6 test cases. This suggests the system could be a valuable tool for improving the safety and acceptability of human-robot collaboration in a variety of real-world applications.
Critical Analysis
The paper presents a novel and promising approach to addressing an important safety challenge in human-robot interaction. By considering both physical and psychological factors, the EMU system takes a more comprehensive view of safety compared to traditional control schemes. The experimental validation also provides encouraging evidence of the system's effectiveness.
However, the paper acknowledges several limitations and avenues for further research. For example, the IM model was developed based on a relatively small sample size of 29 participants, so its generalizability to a broader population is not fully established. Additionally, the validation experiment only tested a limited set of scenarios, so more extensive testing would be needed to assess the EMU's robustness in diverse real-world settings.
Another potential concern is the complexity of integrating the EMU into a broader safety framework. While the authors describe this integration, the specific implementation details and potential challenges are not explored in depth. Ensuring seamless integration with other safety systems could be a significant practical hurdle.
Overall, the Expectable Motion Unit represents an important step forward in enhancing human safety in human-robot collaboration. However, further research and testing will be needed to fully validate the approach and address the remaining challenges before it can be widely deployed in real-world applications.
Conclusion
This paper introduces the Expectable Motion Unit (EMU), a novel system that aims to prevent unintended human movements during human-robot interaction by proactively adjusting the robot's motions. By modeling the probability of involuntary human reactions based on factors like robot speed and distance, the EMU can keep the risk of such events below a safe threshold.
The EMU's integration into a holistic safety framework that considers both physical and psychological factors represents a significant advancement in ensuring the safety and acceptability of human-robot collaboration. While the current research shows promising results, further validation and refinement will be needed to fully realize the potential of this approach. Nonetheless, the EMU stands as an important step forward in enhancing the safety and effectiveness of human-robot interaction in a variety of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏷️
0
Expectable Motion Unit: Avoiding Hazards From Human Involuntary Motions in Human-Robot Interaction
Robin Jeanne Kirschner, Henning Mayer, Lisa Burr, Nico Mansfeld, Saeed Abdolshah, Sami Haddadin
In robotics, many control and planning schemes have been developed to ensure human physical safety in human-robot interaction. The human psychological state and the expectation towards the robot, however, are typically neglected. Even if the robot behaviour is regarded as biomechanically safe, humans may still react with a rapid involuntary motion (IM) caused by a startle or surprise. Such sudden, uncontrolled motions can jeopardize safety and should be prevented by any means. In this letter, we propose the Expectable Motion Unit (EMU), which ensures that a certain probability of IM occurrence is not exceeded in a typical HRI setting. Based on a model of IM occurrence generated through an experiment with 29 participants, we establish the mapping between robot velocity, robot-human distance, and the relative frequency of IM occurrence. This mapping is processed towards a real-time capable robot motion generator that limits the robot velocity during task execution if necessary. The EMU is combined in a holistic safety framework that integrates both the physical and psychological safety knowledge. A validation experiment showed that the EMU successfully avoids human IM in five out of six cases.
Read more8/20/2024

0
Motion Prediction with Gaussian Processes for Safe Human-Robot Interaction in Virtual Environments
Stanley Mugisha, Vamsi Krishna Guda, Christine Chevallereau, Damien Chablat, Matteo Zoppi
Humans use collaborative robots as tools for accomplishing various tasks. The interaction between humans and robots happens in tight shared workspaces. However, these machines must be safe to operate alongside humans to minimize the risk of accidental collisions. Ensuring safety imposes many constraints, such as reduced torque and velocity limits during operation, thus increasing the time to accomplish many tasks. However, for applications such as using collaborative robots as haptic interfaces with intermittent contacts for virtual reality applications, speed limitations result in poor user experiences. This research aims to improve the efficiency of a collaborative robot while improving the safety of the human user. We used Gaussian process models to predict human hand motion and developed strategies for human intention detection based on hand motion and gaze to improve the time for the robot and human security in a virtual environment. We then studied the effect of prediction. Results from comparisons show that the prediction models improved the robot time by 3% and safety by 17%. When used alongside gaze, prediction with Gaussian process models resulted in an improvement of the robot time by 2% and the safety by 13%.
Read more5/21/2024
0
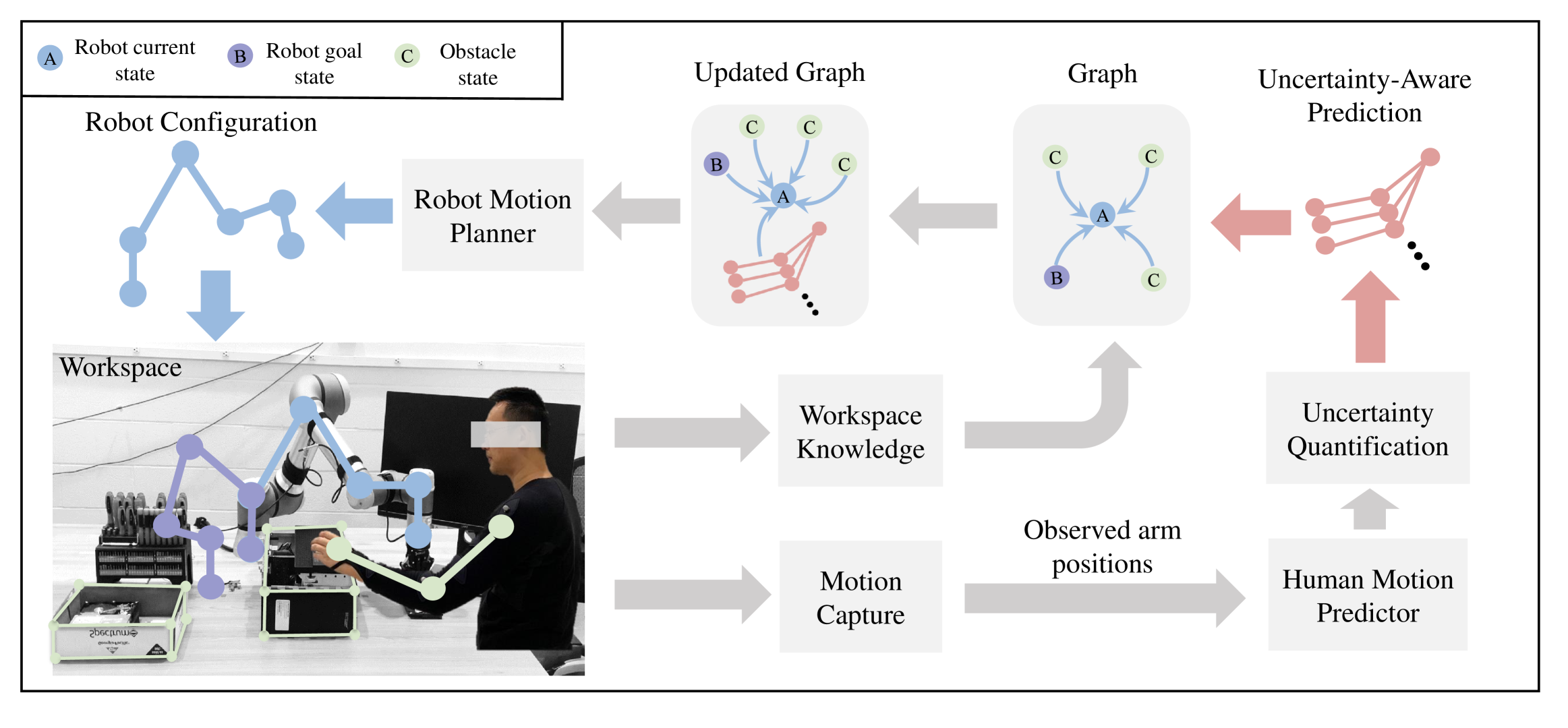
Integrating Uncertainty-Aware Human Motion Prediction into Graph-Based Manipulator Motion Planning
Wansong Liu, Kareem Eltouny, Sibo Tian, Xiao Liang, Minghui Zheng
There has been a growing utilization of industrial robots as complementary collaborators for human workers in re-manufacturing sites. Such a human-robot collaboration (HRC) aims to assist human workers in improving the flexibility and efficiency of labor-intensive tasks. In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. We employ a neural human motion prediction model to enable proactive planning for manipulators. Particularly, rather than blindly trusting and utilizing predicted human trajectories in the manipulator planning, we quantify uncertainties of the neural prediction model to further ensure human safety. Moreover, we integrate the uncertainty-aware prediction into a graph that captures key workspace elements and illustrates their interconnections. Then a graph neural network is leveraged to operate on the constructed graph. Consequently, robot motion planning considers both the dependencies among all the elements in the workspace and the potential influence of future movements of human workers. We experimentally validate the proposed planning framework using a 6-degree-of-freedom manipulator in a shared workspace where a human is performing disassembling tasks. The results demonstrate the benefits of our approach in terms of improving the smoothness and safety of HRC. A brief video introduction of this work is available as the supplemental materials.
Read more5/17/2024

0
Unidirectional Human-Robot-Human Physical Interaction for Gait Training
Lorenzo Amato, Lorenzo Vianello, Emek Baris Kucuktabak, Clement Lhoste, Matthew Short, Daniel Ludvig, Kevin Lynch, Levi Hargrove, Jose L. Pons
This work presents a novel rehabilitation framework designed for a therapist, wearing an inertial measurement unit (IMU) suit, to virtually interact with a lower-limb exoskeleton worn by a patient with motor impairments. This framework aims to harmonize the skills and knowledge of the therapist with the capabilities of the exoskeleton. The therapist can guide the patient's movements by moving their own joints and making real-time adjustments to meet the patient's needs, while reducing the physical effort of the therapist. This eliminates the need for a predefined trajectory for the patient to follow, as in conventional robotic gait training. For the virtual interaction medium between the therapist and patient, we propose an impedance profile that is stiff at low frequencies and less stiff at high frequencies, that can be tailored to individual patient needs and different stages of rehabilitation. The desired interaction torque from this medium is commanded to a whole-exoskeleton closed-loop compensation controller. The proposed virtual interaction framework was evaluated with a pair of unimpaired individuals in different teacher-student gait training exercises. Results show the proposed interaction control effectively transmits haptic cues, informing future applications in rehabilitation scenarios.
Read more9/19/2024