MPC of Uncertain Nonlinear Systems with Meta-Learning for Fast Adaptation of Neural Predictive Models
2404.12097
0
0
Abstract
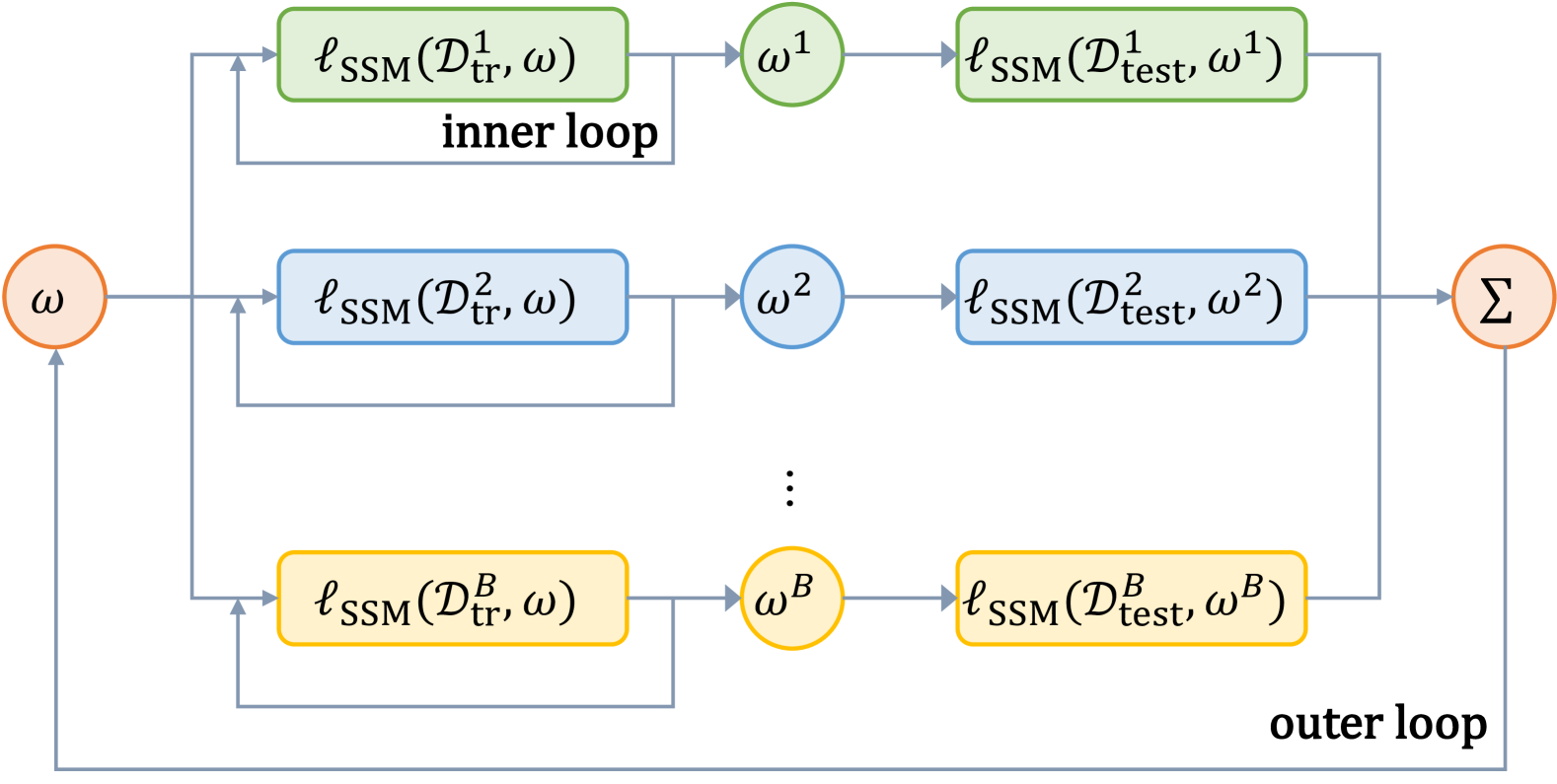
In this paper, we consider the problem of reference tracking in uncertain nonlinear systems. A neural State-Space Model (NSSM) is used to approximate the nonlinear system, where a deep encoder network learns the nonlinearity from data, and a state-space component captures the temporal relationship. This transforms the nonlinear system into a linear system in a latent space, enabling the application of model predictive control (MPC) to determine effective control actions. Our objective is to design the optimal controller using limited data from the textit{target system} (the system of interest). To this end, we employ an implicit model-agnostic meta-learning (iMAML) framework that leverages information from textit{source systems} (systems that share similarities with the target system) to expedite training in the target system and enhance its control performance. The framework consists of two phases: the (offine) meta-training phase learns a aggregated NSSM using data from source systems, and the (online) meta-inference phase quickly adapts this aggregated model to the target system using only a few data points and few online training iterations, based on local loss function gradients. The iMAML algorithm exploits the implicit function theorem to exactly compute the gradient during training, without relying on the entire optimization path. By focusing solely on the optimal solution, rather than the path, we can meta-train with less storage complexity and fewer approximations than other contemporary meta-learning algorithms. We demonstrate through numerical examples that our proposed method can yield accurate predictive models by adaptation, resulting in a downstream MPC that outperforms several baselines.
Create account to get full access
Overview
- This paper presents a model predictive control (MPC) framework for managing uncertain nonlinear systems using meta-learning techniques to rapidly adapt neural predictive models.
- The approach aims to address the challenge of modeling complex, uncertain systems by leveraging meta-learning to enable fast adaptation of neural network-based predictive models.
- Key aspects of the framework include a novel MPC formulation, meta-learning algorithms for model adaptation, and experiments demonstrating the effectiveness on benchmark control tasks.
Plain English Explanation
Model predictive control (MPC) is a powerful technique for managing complex systems, such as robotics, energy grids, or industrial processes. MPC works by using a model of the system to predict how it will behave in the future, and then choosing the best actions to take in the present to achieve desired outcomes.
However, building accurate models for complex, uncertain systems can be very difficult. This paper introduces a new MPC framework that uses meta-learning to address this challenge. Meta-learning is a machine learning technique that allows models to quickly adapt to new situations, similar to how humans can rapidly learn new tasks.
The key idea is to use meta-learning to train a neural network-based predictive model that can adapt itself to accurately model the system, even as the system's behavior changes over time. This allows the MPC controller to make high-quality decisions without needing a perfect model upfront.
The paper demonstrates this approach on several benchmark control problems, showing that it can outperform traditional MPC methods that rely on fixed, pre-determined models. By combining the power of MPC with the flexibility of meta-learning, this framework represents a promising step towards more robust and adaptive control of complex, uncertain systems.
Technical Explanation
The paper presents a model predictive control (MPC) framework for managing uncertain nonlinear systems using meta-learning techniques to rapidly adapt neural predictive models.
The core elements of the approach include:
- A novel MPC formulation that accounts for model uncertainty by incorporating a stochastic objective function and constraint handling.
- Meta-learning algorithms, based on model-agnostic meta-learning (MAML), that enable the neural network-based predictive model to quickly adapt to changes in the system dynamics.
- Experiments on several benchmark control tasks, including an inverted pendulum and a quadrotor system, demonstrating the effectiveness of the proposed framework compared to traditional MPC methods.
The key insight is that by leveraging meta-learning, the neural predictive model can be trained to rapidly adapt its parameters based on a small amount of new data. This allows the MPC controller to maintain high performance even as the system dynamics change over time, without requiring a complete re-training of the model.
The paper also explores techniques for robust and adaptive MPC that can handle model uncertainties and disturbances, further enhancing the reliability of the overall control framework.
Critical Analysis
The paper presents a compelling approach to addressing the challenge of modeling complex, uncertain nonlinear systems for MPC. The use of meta-learning to enable fast adaptation of the neural predictive model is a key innovation that differentiates this work from previous MPC methods relying on fixed models.
However, the paper does not extensively explore the limitations or potential issues with the proposed framework. For example, the authors do not discuss the computational complexity of the meta-learning algorithms or the sensitivity of the approach to the quality and quantity of the training data.
Additionally, while the experiments demonstrate the effectiveness of the framework on benchmark control tasks, it would be valuable to see how it performs on more realistic, large-scale systems with higher levels of uncertainty and complexity. Applying the framework to real-world applications with automatic nonlinear MPC approximation and closed-loop guarantees could further validate its practical utility.
Overall, this paper presents a promising step towards more robust and adaptive control of uncertain nonlinear systems, and the ideas could inspire future research in this direction. However, additional analysis of the approach's limitations and further validation on complex, real-world problems would strengthen the contributions.
Conclusion
This paper introduces a novel model predictive control (MPC) framework that leverages meta-learning techniques to enable rapid adaptation of neural predictive models for managing uncertain nonlinear systems. By combining the power of MPC with the flexibility of meta-learning, the proposed approach can maintain high control performance even as the system dynamics change over time, without requiring a complete re-training of the model.
The key innovations include a novel MPC formulation that accounts for model uncertainty, meta-learning algorithms for fast model adaptation, and experimental validation on benchmark control tasks. This work represents a promising step towards more robust and adaptive control of complex, uncertain systems, with potential applications in a wide range of domains, from robotics and energy systems to industrial processes.
As the field of control theory continues to evolve, approaches like the one presented in this paper will likely play an increasingly important role in enabling the effective management of highly complex, dynamic systems that are crucial to many aspects of modern society.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Efficient model predictive control for nonlinear systems modelled by deep neural networks
Jianglin Lan
0
0
This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
5/20/2024
🚀
Parameter-Adaptive Approximate MPC: Tuning Neural-Network Controllers without Re-Training
Henrik Hose, Alexander Grafe, Sebastian Trimpe
0
0
Model Predictive Control (MPC) is a method to control nonlinear systems with guaranteed stability and constraint satisfaction but suffers from high computation times. Approximate MPC (AMPC) with neural networks (NNs) has emerged to address this limitation, enabling deployment on resource-constrained embedded systems. However, when tuning AMPCs for real-world systems, large datasets need to be regenerated and the NN needs to be retrained at every tuning step. This work introduces a novel, parameter-adaptive AMPC architecture capable of online tuning without recomputing large datasets and retraining. By incorporating local sensitivities of nonlinear programs, the proposed method not only mimics optimal MPC inputs but also adjusts to known changes in physical parameters of the model using linear predictions while still guaranteeing stability. We showcase the effectiveness of parameter-adaptive AMPC by controlling the swing-ups of two different real cartpole systems with a severely resource-constrained microcontroller (MCU). We use the same NN across both system instances that have different parameters. This work not only represents the first experimental demonstration of AMPC for fast-moving systems on low-cost MCUs to the best of our knowledge, but also showcases generalization across system instances and variations through our parameter-adaptation method. Taken together, these contributions represent a marked step toward the practical application of AMPC in real-world systems.
6/7/2024
📈
Mapping back and forth between model predictive control and neural networks
Ross Drummond, Pablo R Baldivieso-Monasterios, Giorgio Valmorbida
0
0
Model predictive control (MPC) for linear systems with quadratic costs and linear constraints is shown to admit an exact representation as an implicit neural network. A method to unravel the implicit neural network of MPC into an explicit one is also introduced. As well as building links between model-based and data-driven control, these results emphasize the capability of implicit neural networks for representing solutions of optimisation problems, as such problems are themselves implicitly defined functions.
4/19/2024
Nonlinear sparse variational Bayesian learning based model predictive control with application to PEMFC temperature control
Qi Zhang, Lei Wang, Weihua Xu, Hongye Su, Lei Xie
0
0
The accuracy of the underlying model predictions is crucial for the success of model predictive control (MPC) applications. If the model is unable to accurately analyze the dynamics of the controlled system, the performance and stability guarantees provided by MPC may not be achieved. Learning-based MPC can learn models from data, improving the applicability and reliability of MPC. This study develops a nonlinear sparse variational Bayesian learning based MPC (NSVB-MPC) for nonlinear systems, where the model is learned by the developed NSVB method. Variational inference is used by NSVB-MPC to assess the predictive accuracy and make the necessary corrections to quantify system uncertainty. The suggested approach ensures input-to-state (ISS) and the feasibility of recursive constraints in accordance with the concept of an invariant terminal region. Finally, a PEMFC temperature control model experiment confirms the effectiveness of the NSVB-MPC method.
4/16/2024