Mapping back and forth between model predictive control and neural networks
2404.12030
0
0
📈
Abstract
Model predictive control (MPC) for linear systems with quadratic costs and linear constraints is shown to admit an exact representation as an implicit neural network. A method to unravel the implicit neural network of MPC into an explicit one is also introduced. As well as building links between model-based and data-driven control, these results emphasize the capability of implicit neural networks for representing solutions of optimisation problems, as such problems are themselves implicitly defined functions.
Create account to get full access
Overview
- The paper shows that model predictive control (MPC) for linear systems with quadratic costs and linear constraints can be represented as an implicit neural network.
- The paper also introduces a method to convert the implicit neural network of MPC into an explicit one.
- These results highlight the capability of implicit neural networks to represent solutions of optimization problems, as such problems are themselves implicitly defined functions.
- The paper builds connections between model-based and data-driven control.
Plain English Explanation
Model predictive control (MPC) is a popular control technique that uses a mathematical model of a system to predict its future behavior and determine the best actions to take. This paper shows that for certain types of linear systems with quadratic costs and linear constraints, the MPC solution can be represented as an implicit neural network. This means that the MPC controller can be thought of as a special type of neural network that is defined implicitly, rather than being explicitly trained.
The paper also introduces a method to "unravel" this implicit neural network and convert it into an explicit neural network, which may be easier to use in some applications. This is an important result because it shows how optimization-based control methods like MPC can be represented using the powerful framework of neural networks.
By making these connections between model-based control (like MPC) and data-driven control (like neural networks), the paper contributes to the growing field of integrating these two approaches. This could lead to more flexible and efficient control systems that can learn from data while still leveraging the insights of physical models.
Technical Explanation
The key technical contribution of the paper is showing that MPC for linear systems with quadratic costs and linear constraints can be exactly represented as an implicit neural network. This means that the MPC controller, which is normally defined as the solution to an optimization problem, can be rewritten as a special type of neural network where the network weights are implicitly defined rather than explicitly trained.
The paper also introduces a method to "unravel" this implicit neural network representation and convert it into an explicit neural network. This explicit neural network can then be used in place of the original MPC controller, potentially offering computational or other advantages.
Importantly, the paper emphasizes that this result highlights the capability of implicit neural networks to represent the solutions of optimization problems, which are themselves implicitly defined functions. This connection between optimization and neural networks is an active area of research, with applications in areas like reinforcement learning and Bayesian optimization.
Critical Analysis
The paper provides a compelling theoretical result by showing the equivalence between MPC and implicit neural networks. However, the practical implications of this result are not fully explored. The paper does not discuss the computational efficiency or numerical stability of the implicit neural network representation compared to the original MPC formulation.
Additionally, the paper only considers linear systems with quadratic costs and linear constraints. It would be interesting to see if the implicit neural network representation can be extended to more general classes of MPC problems, such as those involving nonlinear dynamics or non-quadratic costs. Some recent work has explored these more general cases, but the connections to implicit neural networks are not as well-established.
Overall, the paper makes an important theoretical contribution by linking MPC to the powerful framework of implicit neural networks. However, further research is needed to fully understand the practical implications and potential extensions of this result.
Conclusion
This paper demonstrates that model predictive control (MPC) for certain classes of linear systems can be exactly represented as an implicit neural network. This result builds connections between model-based and data-driven control approaches, highlighting the capability of implicit neural networks to represent solutions of optimization problems.
The ability to convert MPC into an explicit neural network representation opens up new possibilities for integrating classical control methods with modern machine learning techniques. This could lead to more flexible and efficient control systems that can learn from data while still leveraging the insights of physical models.
While the theoretical insights are compelling, further research is needed to understand the practical implications and potential extensions of this work. Nonetheless, this paper represents an important step forward in the ongoing efforts to bridge the gap between model-based and data-driven control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Efficient model predictive control for nonlinear systems modelled by deep neural networks
Jianglin Lan
0
0
This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
5/20/2024
🚀
Parameter-Adaptive Approximate MPC: Tuning Neural-Network Controllers without Re-Training
Henrik Hose, Alexander Grafe, Sebastian Trimpe
0
0
Model Predictive Control (MPC) is a method to control nonlinear systems with guaranteed stability and constraint satisfaction but suffers from high computation times. Approximate MPC (AMPC) with neural networks (NNs) has emerged to address this limitation, enabling deployment on resource-constrained embedded systems. However, when tuning AMPCs for real-world systems, large datasets need to be regenerated and the NN needs to be retrained at every tuning step. This work introduces a novel, parameter-adaptive AMPC architecture capable of online tuning without recomputing large datasets and retraining. By incorporating local sensitivities of nonlinear programs, the proposed method not only mimics optimal MPC inputs but also adjusts to known changes in physical parameters of the model using linear predictions while still guaranteeing stability. We showcase the effectiveness of parameter-adaptive AMPC by controlling the swing-ups of two different real cartpole systems with a severely resource-constrained microcontroller (MCU). We use the same NN across both system instances that have different parameters. This work not only represents the first experimental demonstration of AMPC for fast-moving systems on low-cost MCUs to the best of our knowledge, but also showcases generalization across system instances and variations through our parameter-adaptation method. Taken together, these contributions represent a marked step toward the practical application of AMPC in real-world systems.
6/7/2024
MPC of Uncertain Nonlinear Systems with Meta-Learning for Fast Adaptation of Neural Predictive Models
Jiaqi Yan, Ankush Chakrabarty, Alisa Rupenyan, John Lygeros
0
0
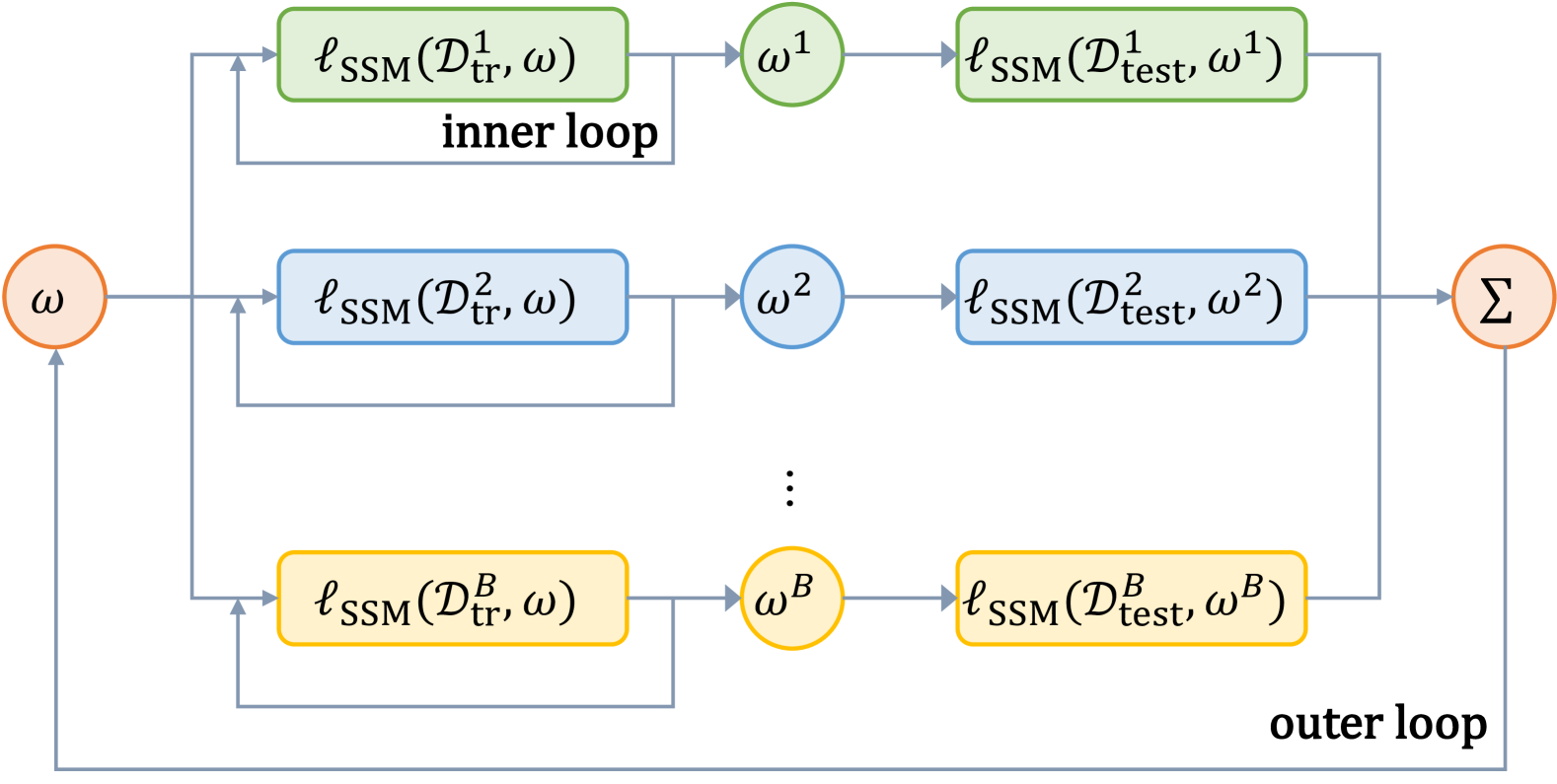
In this paper, we consider the problem of reference tracking in uncertain nonlinear systems. A neural State-Space Model (NSSM) is used to approximate the nonlinear system, where a deep encoder network learns the nonlinearity from data, and a state-space component captures the temporal relationship. This transforms the nonlinear system into a linear system in a latent space, enabling the application of model predictive control (MPC) to determine effective control actions. Our objective is to design the optimal controller using limited data from the textit{target system} (the system of interest). To this end, we employ an implicit model-agnostic meta-learning (iMAML) framework that leverages information from textit{source systems} (systems that share similarities with the target system) to expedite training in the target system and enhance its control performance. The framework consists of two phases: the (offine) meta-training phase learns a aggregated NSSM using data from source systems, and the (online) meta-inference phase quickly adapts this aggregated model to the target system using only a few data points and few online training iterations, based on local loss function gradients. The iMAML algorithm exploits the implicit function theorem to exactly compute the gradient during training, without relying on the entire optimization path. By focusing solely on the optimal solution, rather than the path, we can meta-train with less storage complexity and fewer approximations than other contemporary meta-learning algorithms. We demonstrate through numerical examples that our proposed method can yield accurate predictive models by adaptation, resulting in a downstream MPC that outperforms several baselines.
4/19/2024
🧠
PlanNetX: Learning an Efficient Neural Network Planner from MPC for Longitudinal Control
Jasper Hoffmann, Diego Fernandez, Julien Brosseit, Julian Bernhard, Klemens Esterle, Moritz Werling, Michael Karg, Joschka Boedecker
0
0
Model predictive control (MPC) is a powerful, optimization-based approach for controlling dynamical systems. However, the computational complexity of online optimization can be problematic on embedded devices. Especially, when we need to guarantee fixed control frequencies. Thus, previous work proposed to reduce the computational burden using imitation learning (IL) approximating the MPC policy by a neural network. In this work, we instead learn the whole planned trajectory of the MPC. We introduce a combination of a novel neural network architecture PlanNetX and a simple loss function based on the state trajectory that leverages the parameterized optimal control structure of the MPC. We validate our approach in the context of autonomous driving by learning a longitudinal planner and benchmarking it extensively in the CommonRoad simulator using synthetic scenarios and scenarios derived from real data. Our experimental results show that we can learn the open-loop MPC trajectory with high accuracy while improving the closed-loop performance of the learned control policy over other baselines like behavior cloning.
5/24/2024