Efficient model predictive control for nonlinear systems modelled by deep neural networks
2405.10372
0
0
Abstract
This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
Create account to get full access
Overview
- This paper presents an efficient model predictive control (MPC) approach for controlling nonlinear systems modeled using deep neural networks.
- The proposed method combines a deep neural network model with a computationally efficient MPC algorithm to enable real-time control of complex nonlinear systems.
- The researchers demonstrate the effectiveness of their approach through simulations and experiments on various benchmark nonlinear control problems.
Plain English Explanation
Model predictive control (MPC) is a powerful technique for controlling complex systems, such as industrial processes or robotic systems. MPC works by using a model of the system to predict how the system will behave in the future, and then optimizing the control inputs to achieve the desired behavior.
However, traditional MPC approaches can be computationally expensive, especially for highly nonlinear systems. This paper proposes a new approach that combines MPC with deep neural networks (DNNs) to create a more efficient and effective control system.
The key idea is to use a DNN to model the nonlinear dynamics of the system, rather than using a traditional mathematical model. This DNN model can then be integrated into the MPC optimization process, allowing the controller to quickly predict the future behavior of the system and determine the best control inputs.
The researchers demonstrate the effectiveness of their approach on several benchmark control problems, showing that it can outperform traditional MPC approaches in terms of computational efficiency and control performance. This could be particularly useful for applications where real-time control is required, such as in robotics or process control.
Overall, this research represents an important step forward in the field of MPC for nonlinear systems, and could pave the way for more efficient and adaptive control systems in a wide range of applications.
Technical Explanation
The paper proposes an efficient model predictive control (MPC) approach for nonlinear systems, where the system dynamics are modeled using a deep neural network (DNN). The key elements of the proposed approach are as follows:
-
DNN-based System Model: The researchers train a DNN to model the nonlinear dynamics of the system, using data collected from the system. This DNN model is then used within the MPC optimization process to predict the future behavior of the system.
-
Efficient MPC Optimization: The paper presents a computationally efficient MPC optimization algorithm that leverages the DNN model. This algorithm uses a combination of gradient-based optimization and a custom-designed quadratic program solver to rapidly solve the MPC optimization problem.
-
Stability and Constraint Handling: The researchers prove that the proposed MPC approach can guarantee stability and handle state and input constraints, despite the use of a DNN model.
-
Benchmark Evaluations: The effectiveness of the proposed approach is demonstrated through simulations and experiments on various nonlinear control problems, including the cart-pole system and the pendulum swing-up task. The results show that the DNN-based MPC outperforms traditional MPC approaches in terms of computational efficiency and control performance.
Critical Analysis
The paper presents a promising approach for efficient model predictive control of nonlinear systems using deep neural networks. The key strengths of the proposed method are its computational efficiency and its ability to handle complex nonlinear dynamics without sacrificing stability and constraint handling.
However, the paper also acknowledges several limitations and areas for further research:
-
Generalization and Robustness: The paper focuses on evaluating the proposed approach on a limited set of benchmark problems. More research is needed to understand how well the DNN-based MPC approach can generalize to a wider range of nonlinear systems and handle uncertainty or disturbances in the system dynamics.
-
Offline Model Training: The current approach requires an offline training phase to obtain the DNN system model. This may limit its applicability to systems where the dynamics are changing over time or are not known a priori. Adaptive or meta-learning approaches could be explored to address this limitation.
-
Interpretability and Explainability: The use of a DNN model introduces a certain level of opacity, which may be a concern in applications where the control decisions need to be explainable or transparent. Sparse or interpretable DNN architectures could be investigated to address this issue.
-
Extension to Larger-scale Systems: The paper primarily focuses on relatively small-scale nonlinear systems. Scaling the proposed approach to larger, more complex systems may require additional research and optimizations.
Overall, this paper presents an important contribution to the field of model predictive control for nonlinear systems, demonstrating the potential of combining deep learning and efficient optimization techniques to enable real-time control of complex systems. Further research to address the limitations and expand the applicability of the approach could lead to significant advancements in adaptive and efficient control systems.
Conclusion
This paper presents an efficient model predictive control (MPC) approach for nonlinear systems, where the system dynamics are modeled using a deep neural network (DNN). The key innovation is the integration of the DNN model into a computationally efficient MPC optimization algorithm, which allows for real-time control of complex nonlinear systems.
The researchers demonstrate the effectiveness of their approach through simulations and experiments on various benchmark control problems, showing that the DNN-based MPC can outperform traditional MPC approaches in terms of computational efficiency and control performance. This could have significant implications for a wide range of applications, such as robotics, industrial processes, and renewable energy systems, where real-time control of nonlinear dynamics is crucial.
While the paper acknowledges several limitations and areas for further research, such as generalization, robustness, and interpretability, the overall contribution represents an important step forward in the field of model predictive control for nonlinear systems. Continued advancements in this area could pave the way for more efficient and adaptive control systems that can effectively manage the complexity of real-world nonlinear systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
Mapping back and forth between model predictive control and neural networks
Ross Drummond, Pablo R Baldivieso-Monasterios, Giorgio Valmorbida
0
0
Model predictive control (MPC) for linear systems with quadratic costs and linear constraints is shown to admit an exact representation as an implicit neural network. A method to unravel the implicit neural network of MPC into an explicit one is also introduced. As well as building links between model-based and data-driven control, these results emphasize the capability of implicit neural networks for representing solutions of optimisation problems, as such problems are themselves implicitly defined functions.
4/19/2024
MPC of Uncertain Nonlinear Systems with Meta-Learning for Fast Adaptation of Neural Predictive Models
Jiaqi Yan, Ankush Chakrabarty, Alisa Rupenyan, John Lygeros
0
0
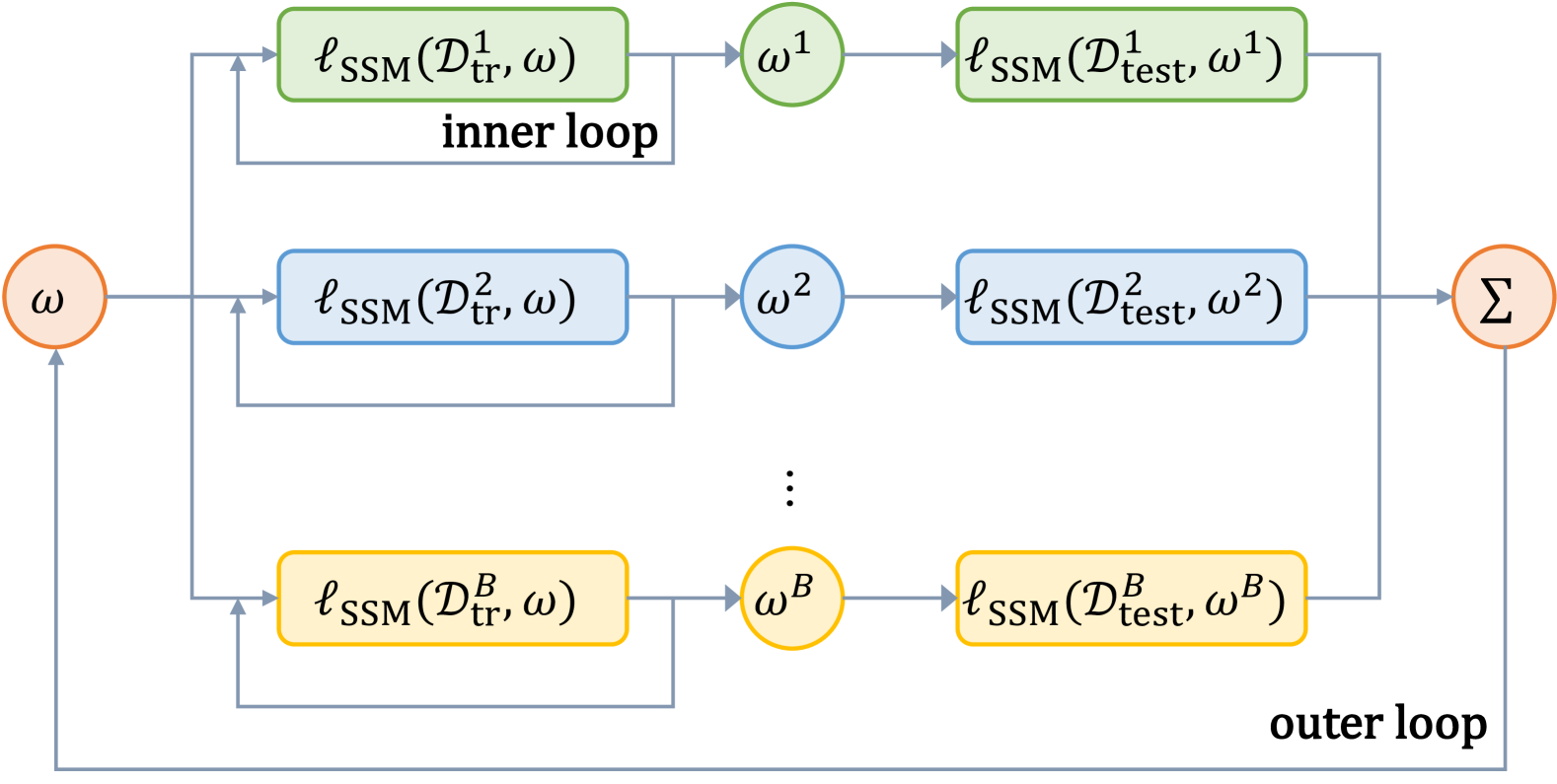
In this paper, we consider the problem of reference tracking in uncertain nonlinear systems. A neural State-Space Model (NSSM) is used to approximate the nonlinear system, where a deep encoder network learns the nonlinearity from data, and a state-space component captures the temporal relationship. This transforms the nonlinear system into a linear system in a latent space, enabling the application of model predictive control (MPC) to determine effective control actions. Our objective is to design the optimal controller using limited data from the textit{target system} (the system of interest). To this end, we employ an implicit model-agnostic meta-learning (iMAML) framework that leverages information from textit{source systems} (systems that share similarities with the target system) to expedite training in the target system and enhance its control performance. The framework consists of two phases: the (offine) meta-training phase learns a aggregated NSSM using data from source systems, and the (online) meta-inference phase quickly adapts this aggregated model to the target system using only a few data points and few online training iterations, based on local loss function gradients. The iMAML algorithm exploits the implicit function theorem to exactly compute the gradient during training, without relying on the entire optimization path. By focusing solely on the optimal solution, rather than the path, we can meta-train with less storage complexity and fewer approximations than other contemporary meta-learning algorithms. We demonstrate through numerical examples that our proposed method can yield accurate predictive models by adaptation, resulting in a downstream MPC that outperforms several baselines.
4/19/2024
🚀
Parameter-Adaptive Approximate MPC: Tuning Neural-Network Controllers without Re-Training
Henrik Hose, Alexander Grafe, Sebastian Trimpe
0
0
Model Predictive Control (MPC) is a method to control nonlinear systems with guaranteed stability and constraint satisfaction but suffers from high computation times. Approximate MPC (AMPC) with neural networks (NNs) has emerged to address this limitation, enabling deployment on resource-constrained embedded systems. However, when tuning AMPCs for real-world systems, large datasets need to be regenerated and the NN needs to be retrained at every tuning step. This work introduces a novel, parameter-adaptive AMPC architecture capable of online tuning without recomputing large datasets and retraining. By incorporating local sensitivities of nonlinear programs, the proposed method not only mimics optimal MPC inputs but also adjusts to known changes in physical parameters of the model using linear predictions while still guaranteeing stability. We showcase the effectiveness of parameter-adaptive AMPC by controlling the swing-ups of two different real cartpole systems with a severely resource-constrained microcontroller (MCU). We use the same NN across both system instances that have different parameters. This work not only represents the first experimental demonstration of AMPC for fast-moving systems on low-cost MCUs to the best of our knowledge, but also showcases generalization across system instances and variations through our parameter-adaptation method. Taken together, these contributions represent a marked step toward the practical application of AMPC in real-world systems.
6/7/2024

System-level Safety Guard: Safe Tracking Control through Uncertain Neural Network Dynamics Models
Xiao Li, Yutong Li, Anouck Girard, Ilya Kolmanovsky
0
0
The Neural Network (NN), as a black-box function approximator, has been considered in many control and robotics applications. However, difficulties in verifying the overall system safety in the presence of uncertainties hinder the deployment of NN modules in safety-critical systems. In this paper, we leverage the NNs as predictive models for trajectory tracking of unknown dynamical systems. We consider controller design in the presence of both intrinsic uncertainty and uncertainties from other system modules. In this setting, we formulate the constrained trajectory tracking problem and show that it can be solved using Mixed-integer Linear Programming (MILP). The proposed MILP-based approach is empirically demonstrated in robot navigation and obstacle avoidance through simulations. The demonstration videos are available at https://xiaolisean.github.io/publication/2023-11-01-L4DC2024.
5/21/2024