Nonlinear sparse variational Bayesian learning based model predictive control with application to PEMFC temperature control
2404.09519
0
0
Abstract
The accuracy of the underlying model predictions is crucial for the success of model predictive control (MPC) applications. If the model is unable to accurately analyze the dynamics of the controlled system, the performance and stability guarantees provided by MPC may not be achieved. Learning-based MPC can learn models from data, improving the applicability and reliability of MPC. This study develops a nonlinear sparse variational Bayesian learning based MPC (NSVB-MPC) for nonlinear systems, where the model is learned by the developed NSVB method. Variational inference is used by NSVB-MPC to assess the predictive accuracy and make the necessary corrections to quantify system uncertainty. The suggested approach ensures input-to-state (ISS) and the feasibility of recursive constraints in accordance with the concept of an invariant terminal region. Finally, a PEMFC temperature control model experiment confirms the effectiveness of the NSVB-MPC method.
Create account to get full access
Overview
- This paper presents a nonlinear sparse variational Bayesian learning (NSVBL) based model predictive control (MPC) approach for temperature control in proton exchange membrane fuel cells (PEMFCs).
- The proposed method combines NSVBL, which learns a nonlinear model from sparse data, with MPC to provide efficient temperature regulation in PEMFCs.
- The key contributions include the NSVBL-based MPC framework and its application to PEMFC temperature control, demonstrating improved performance over conventional MPC.
Plain English Explanation
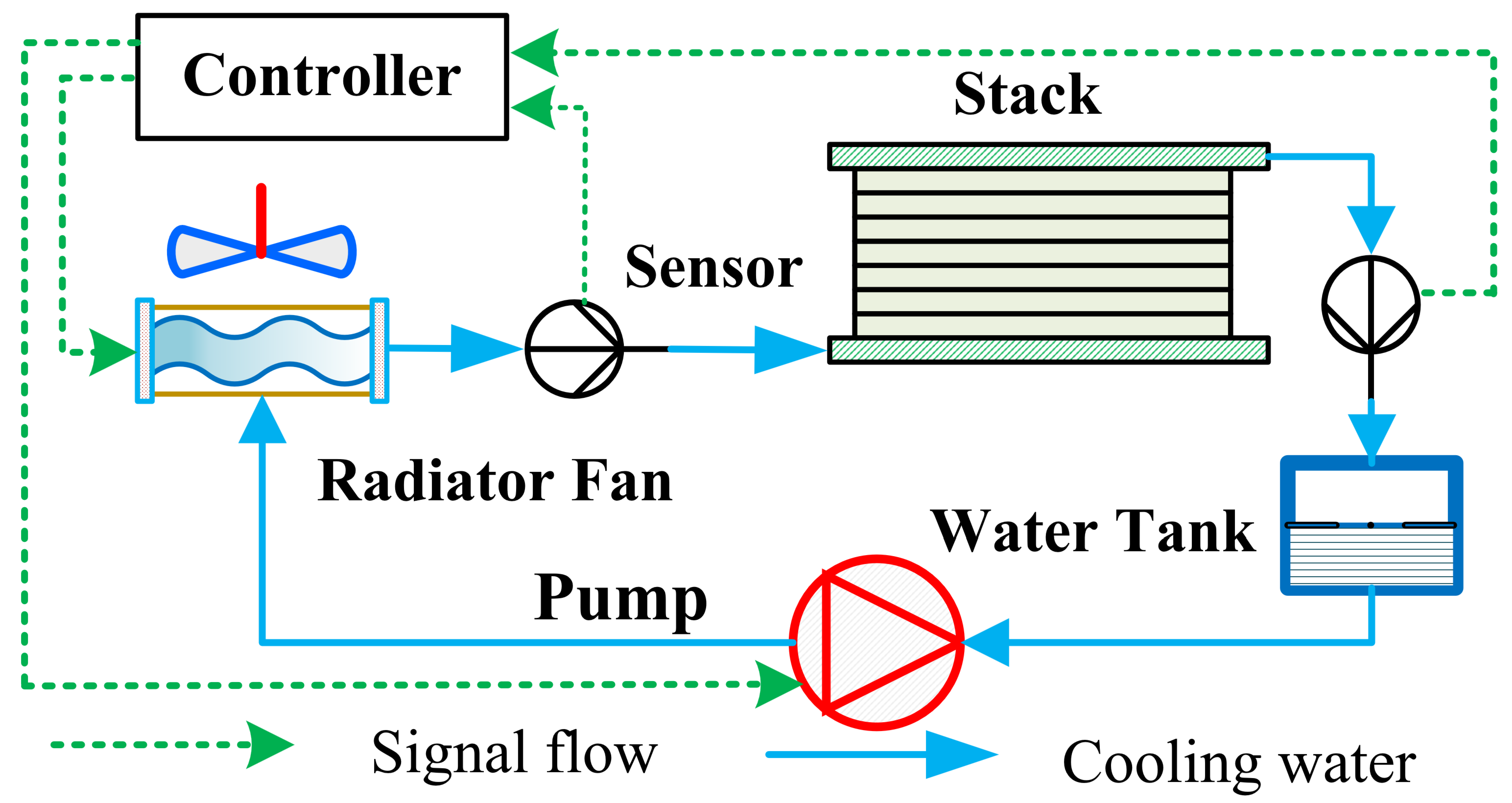
The paper describes a new approach to controlling the temperature of proton exchange membrane fuel cells (PEMFCs), which are a type of clean energy technology. PEMFCs need to be kept at the right temperature to function properly, but this can be challenging due to the complex, nonlinear behavior of the system.
The researchers developed a method that combines two key techniques: nonlinear sparse variational Bayesian learning (NSVBL) and model predictive control (MPC). NSVBL is used to learn a mathematical model of the PEMFC system from limited data, capturing the nonlinear relationships. This learned model is then used within an MPC framework to dynamically adjust the temperature controls and keep the PEMFC running at the optimal temperature.
The researchers show that their NSVBL-based MPC approach outperforms conventional MPC techniques for PEMFC temperature regulation, demonstrating the benefits of integrating these advanced machine learning and control methods. This work could help improve the efficiency and reliability of PEMFC systems, which are important for the wider adoption of this clean energy technology.
Technical Explanation
The paper presents a nonlinear sparse variational Bayesian learning (NSVBL)-based model predictive control (MPC) framework for temperature control in proton exchange membrane fuel cells (PEMFCs). NSVBL is used to learn a nonlinear model of the PEMFC system from limited, sparse data. This learned model is then incorporated into an MPC controller to dynamically regulate the PEMFC temperature.
The NSVBL-based approach involves representing the PEMFC dynamics using a Gaussian process (GP) model, which can capture the nonlinear relationships in the system. The GP hyperparameters are optimized using a sparse variational Bayesian inference method, allowing an accurate model to be learned from limited data. This learned GP model is then used within an MPC formulation to predict the future PEMFC temperature behavior and determine the optimal control actions to maintain the temperature at the desired setpoint.
The researchers evaluate the proposed NSVBL-based MPC approach through simulations and demonstrate its improved performance compared to conventional MPC techniques for PEMFC temperature control. The NSVBL-MPC exhibits better tracking of the temperature reference, faster disturbance rejection, and greater robustness to model uncertainties.
Critical Analysis
The paper presents a novel and promising approach to PEMFC temperature control by integrating advanced machine learning and control techniques. The use of NSVBL to learn a nonlinear model from sparse data is a key strength, as it can better capture the complex dynamics of the PEMFC system compared to traditional linear models.
However, the paper does not address the computational complexity and real-time implementation feasibility of the NSVBL-MPC approach. The optimization and model predictive control calculations may impose significant computational burdens, which could limit the practical applicability of the method, especially for embedded PEMFC control systems with limited resources.
Additionally, the paper focuses solely on temperature control and does not consider other important PEMFC performance metrics, such as efficiency, power output, and degradation. Future research could explore how the NSVBL-MPC framework can be extended to optimize these additional aspects of PEMFC operation, potentially through multi-objective control or hierarchical control architectures.
Conclusion
This paper presents a nonlinear sparse variational Bayesian learning (NSVBL)-based model predictive control (MPC) approach for proton exchange membrane fuel cell (PEMFC) temperature regulation. The key contribution is the integration of NSVBL, which learns an accurate nonlinear model from limited data, with the MPC framework to provide efficient temperature control for PEMFCs.
The results demonstrate the advantages of the NSVBL-MPC method over conventional MPC, including improved temperature tracking, faster disturbance rejection, and greater robustness. This work represents an important step towards enhancing the performance and reliability of PEMFC systems, which are crucial for the wider adoption of this clean energy technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Efficient model predictive control for nonlinear systems modelled by deep neural networks
Jianglin Lan
0
0
This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
5/20/2024
📈
Learning Model Predictive Control Parameters via Bayesian Optimization for Battery Fast Charging
Sebastian Hirt, Andreas Hohl, Joachim Schaeffer, Johannes Pohlodek, Richard D. Braatz, Rolf Findeisen
0
0
Tuning parameters in model predictive control (MPC) presents significant challenges, particularly when there is a notable discrepancy between the controller's predictions and the actual behavior of the closed-loop plant. This mismatch may stem from factors like substantial model-plant differences, limited prediction horizons that do not cover the entire time of interest, or unforeseen system disturbances. Such mismatches can jeopardize both performance and safety, including constraint satisfaction. Traditional methods address this issue by modifying the finite horizon cost function to better reflect the overall operational cost, learning parts of the prediction model from data, or implementing robust MPC strategies, which might be either computationally intensive or overly cautious. As an alternative, directly optimizing or learning the controller parameters to enhance closed-loop performance has been proposed. We apply Bayesian optimization for efficient learning of unknown model parameters and parameterized constraint backoff terms, aiming to improve closed-loop performance of battery fast charging. This approach establishes a hierarchical control framework where Bayesian optimization directly fine-tunes closed-loop behavior towards a global and long-term objective, while MPC handles lower-level, short-term control tasks. For lithium-ion battery fast charging, we show that the learning approach not only ensures safe operation but also maximizes closed-loop performance. This includes maintaining the battery's operation below its maximum terminal voltage and reducing charging times, all achieved using a standard nominal MPC model with a short horizon and notable initial model-plant mismatch.
4/10/2024
MPC of Uncertain Nonlinear Systems with Meta-Learning for Fast Adaptation of Neural Predictive Models
Jiaqi Yan, Ankush Chakrabarty, Alisa Rupenyan, John Lygeros
0
0
In this paper, we consider the problem of reference tracking in uncertain nonlinear systems. A neural State-Space Model (NSSM) is used to approximate the nonlinear system, where a deep encoder network learns the nonlinearity from data, and a state-space component captures the temporal relationship. This transforms the nonlinear system into a linear system in a latent space, enabling the application of model predictive control (MPC) to determine effective control actions. Our objective is to design the optimal controller using limited data from the textit{target system} (the system of interest). To this end, we employ an implicit model-agnostic meta-learning (iMAML) framework that leverages information from textit{source systems} (systems that share similarities with the target system) to expedite training in the target system and enhance its control performance. The framework consists of two phases: the (offine) meta-training phase learns a aggregated NSSM using data from source systems, and the (online) meta-inference phase quickly adapts this aggregated model to the target system using only a few data points and few online training iterations, based on local loss function gradients. The iMAML algorithm exploits the implicit function theorem to exactly compute the gradient during training, without relying on the entire optimization path. By focusing solely on the optimal solution, rather than the path, we can meta-train with less storage complexity and fewer approximations than other contemporary meta-learning algorithms. We demonstrate through numerical examples that our proposed method can yield accurate predictive models by adaptation, resulting in a downstream MPC that outperforms several baselines.
4/19/2024

Stability-informed Bayesian Optimization for MPC Cost Function Learning
Sebastian Hirt, Maik Pfefferkorn, Ali Mesbah, Rolf Findeisen
0
0
Designing predictive controllers towards optimal closed-loop performance while maintaining safety and stability is challenging. This work explores closed-loop learning for predictive control parameters under imperfect information while considering closed-loop stability. We employ constrained Bayesian optimization to learn a model predictive controller's (MPC) cost function parametrized as a feedforward neural network, optimizing closed-loop behavior as well as minimizing model-plant mismatch. Doing so offers a high degree of freedom and, thus, the opportunity for efficient and global optimization towards the desired and optimal closed-loop behavior. We extend this framework by stability constraints on the learned controller parameters, exploiting the optimal value function of the underlying MPC as a Lyapunov candidate. The effectiveness of the proposed approach is underlined in simulations, highlighting its performance and safety capabilities.
4/19/2024