MS-Mapping: Multi-session LiDAR Mapping with Wasserstein-based Keyframe Selection

0
Sign in to get full access
Overview
- This paper presents a novel method called MS-Mapping for multi-session LiDAR mapping, which aims to efficiently build 3D maps from multiple LiDAR data collection sessions.
- The key innovations include a Wasserstein-based keyframe selection algorithm and an optimization-based registration approach to align data across sessions.
- The proposed system demonstrates improved mapping accuracy and efficiency compared to existing techniques, making it a valuable tool for applications like autonomous navigation and smart city infrastructure planning.
Plain English Explanation
The researchers have developed a new system called MS-Mapping that can create detailed 3D maps from multiple sets of LiDAR data collected over time. LiDAR is a technology that uses laser beams to measure distances and create 3D point cloud models of the environment.
Traditionally, building a comprehensive 3D map requires collecting data from a single continuous LiDAR survey. However, this can be time-consuming and impractical, especially for large-scale mapping projects. The MS-Mapping approach allows the researchers to combine multiple shorter LiDAR data collection sessions to construct the final map.
The key innovation is a method called Wasserstein-based keyframe selection, which identifies the most representative and informative frames from each LiDAR data set. This helps to reduce the amount of data that needs to be processed while preserving the important details. The system also uses an optimization-based registration technique to accurately align the data from the different sessions.
By combining data from multiple sources in this way, the MS-Mapping system can create 3D maps more efficiently and with greater accuracy than previous methods. This could have important applications in fields like autonomous vehicles, where up-to-date and precise maps of the environment are critical for safe navigation. It may also benefit smart city planning by providing detailed 3D models of urban infrastructure.
Technical Explanation
The MS-Mapping method addresses the challenge of building comprehensive 3D maps from multiple discrete LiDAR data collection sessions, rather than a single continuous survey.
The core innovations include:
-
Wasserstein-based Keyframe Selection: The system uses the Wasserstein distance, a powerful metric for comparing probability distributions, to identify the most representative and informative keyframes from each LiDAR session. This reduces the amount of data that needs to be processed while preserving important details.
-
Optimization-based Registration: An optimization-based approach aligns the data from the different sessions by finding the optimal rigid transformations to register the point clouds. This compensates for any discrepancies in sensor pose or environmental changes between sessions.
The researchers evaluate their MS-Mapping approach on several benchmark datasets and demonstrate significant improvements in mapping accuracy and efficiency compared to existing multi-session LiDAR SLAM and registration techniques.
Critical Analysis
The paper provides a well-designed and thorough evaluation of the MS-Mapping system, including detailed comparisons to state-of-the-art alternatives on publicly available datasets. The authors acknowledge some limitations, such as the potential impact of sensor calibration errors and the need for further testing in more diverse environments.
One area that could benefit from additional exploration is the robustness of the Wasserstein-based keyframe selection to changes in the environment between sessions, such as the presence of dynamic objects. The paper focuses primarily on static scenes, and it would be interesting to see how the system performs in more complex, evolving surroundings.
Furthermore, while the registration optimization is a key contribution, the paper does not provide a detailed analysis of its computational complexity or runtime performance. This information would be helpful for assessing the practical feasibility of deploying the MS-Mapping system in real-world applications with strict latency requirements, such as autonomous driving.
Overall, the MS-Mapping approach represents a significant advance in the field of multi-session LiDAR mapping, with promising implications for a variety of spatial perception and mapping tasks. The thoughtful design and thorough evaluation make this a valuable addition to the literature.
Conclusion
The MS-Mapping system presented in this paper offers an efficient and effective solution for building high-quality 3D maps from multiple discrete LiDAR data collection sessions. By leveraging innovative Wasserstein-based keyframe selection and optimization-based registration techniques, the system demonstrates improved mapping accuracy and efficiency compared to existing methods.
This research has important applications in areas like autonomous navigation, where up-to-date and precise environmental models are critical for safe and reliable operation. The 3D mapping capabilities of MS-Mapping may also benefit smart city planning and infrastructure management by providing detailed digital twins of urban environments.
While the paper identifies some limitations and opportunities for further investigation, the overall technical contributions and experimental results make this a significant advancement in the field of multi-session LiDAR mapping. The insights and methodologies presented here are likely to inspire future research and drive progress towards more robust and efficient spatial perception systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MS-Mapping: Multi-session LiDAR Mapping with Wasserstein-based Keyframe Selection
Xiangcheng Hu, Jin Wu, Jianhao Jiao, Wei Zhang, Ping Tan
Large-scale multi-session LiDAR mapping is crucial for various applications but still faces significant challenges in data redundancy, memory consumption, and efficiency. This paper presents MS-Mapping, a novel multi-session LiDAR mapping system that incorporates an incremental mapping scheme to enable efficient map assembly in large-scale environments. To address the data redundancy and improve graph optimization efficiency caused by the vast amount of point cloud data, we introduce a real-time keyframe selection method based on the Wasserstein distance. Our approach formulates the LiDAR point cloud keyframe selection problem using a similarity method based on Gaussian mixture models (GMM) and addresses the real-time challenge by employing an incremental voxel update method. To facilitate further research and development in the community, we make our codefootnote{https://github.com/JokerJohn/MS-Mapping} and datasets publicly available.
Read more7/18/2024

0
MS-Mapping: An Uncertainty-Aware Large-Scale Multi-Session LiDAR Mapping System
Xiangcheng Hu, Jin Wu, Jianhao Jiao, Binqian Jiang, Wei Zhang, Wenshuo Wang, Ping Tan
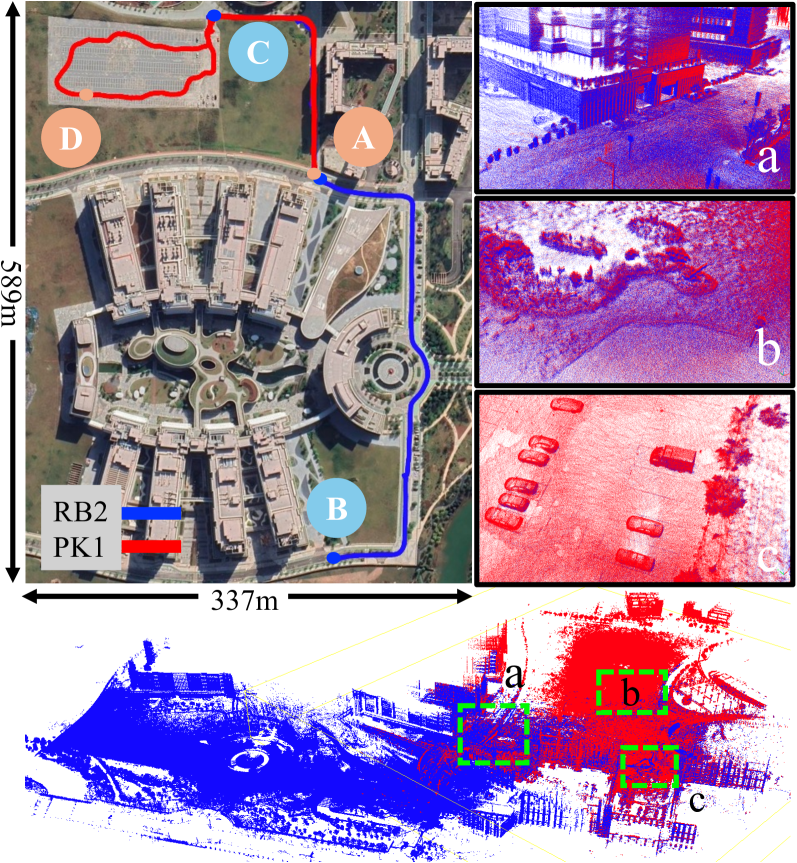
Large-scale multi-session LiDAR mapping is essential for a wide range of applications, including surveying, autonomous driving, crowdsourced mapping, and multi-agent navigation. However, existing approaches often struggle with data redundancy, robustness, and accuracy in complex environments. To address these challenges, we present MS-Mapping, an novel multi-session LiDAR mapping system that employs an incremental mapping scheme for robust and accurate map assembly in large-scale environments. Our approach introduces three key innovations: 1) A distribution-aware keyframe selection method that captures the subtle contributions of each point cloud frame to the map by analyzing the similarity of map distributions. This method effectively reduces data redundancy and pose graph size, while enhancing graph optimization speed; 2) An uncertainty model that automatically performs least-squares adjustments according to the covariance matrix during graph optimization, improving mapping precision, robustness, and flexibility without the need for scene-specific parameter tuning. This uncertainty model enables our system to monitor pose uncertainty and avoid ill-posed optimizations, thereby increasing adaptability to diverse and challenging environments. 3) To ensure fair evaluation, we redesign baseline comparisons and the evaluation benchmark. Direct assessment of map accuracy demonstrates the superiority of the proposed MS-Mapping algorithm compared to state-of-the-art methods. In addition to employing public datasets such as Urban-Nav, FusionPortable, and Newer College, we conducted extensive experiments on such a large SI{855}{m}$times$SI{636}{m} ground truth map, collecting over SI{20}{km} of indoor and outdoor data across more than ten sequences...
Read more8/9/2024

0
SLIM: Scalable and Lightweight LiDAR Mapping in Urban Environments
Zehuan Yu, Zhijian Qiao, Wenyi Liu, Huan Yin, Shaojie Shen
LiDAR point cloud maps are extensively utilized on roads for robot navigation due to their high consistency. However, dense point clouds face challenges of high memory consumption and reduced maintainability for long-term operations. In this study, we introduce SLIM, a scalable and lightweight mapping system for long-term LiDAR mapping in urban environments. The system begins by parameterizing structural point clouds into lines and planes. These lightweight and structural representations meet the requirements of map merging, pose graph optimization, and bundle adjustment, ensuring incremental management and local consistency. For long-term operations, a map-centric nonlinear factor recovery method is designed to sparsify poses while preserving mapping accuracy. We validate the SLIM system with multi-session real-world LiDAR data from classical LiDAR mapping datasets, including KITTI, NCLT, and HeLiPR. The experiments demonstrate its capabilities in mapping accuracy, lightweightness, and scalability. Map re-use is also verified through map-based robot localization. Ultimately, with multi-session LiDAR data, the SLIM system provides a globally consistent map with low memory consumption (130 KB/km). We have made our code open-source to benefit the community.
Read more9/16/2024
🗣️
0
MSC-LIO: An MSCKF-Based LiDAR-Inertial Odometry with Same-Plane-Point Tracking
Tisheng Zhang, Man Yuan, Linfu Wei, Hailiang Tang, Xiaoji Niu
The multi-state constraint Kalman filter (MSCKF) has been proven to be more efficient than graph optimization for visual-based odometry while with similar accuracy. However, it has not yet been properly considered and studied for LiDAR-based odometry. In this paper, we propose a novel tightly coupled LiDAR-inertial odometry based on the MSCKF framework, named MSC-LIO. An efficient LiDAR same-plane-point (LSPP) tracking method, without explicit feature extraction, is present for frame-to-frame data associations. The tracked LSPPs are employed to build an LSPP measurement model, which constructs a multi-state constraint. Besides, we propose an effective point-velocity-based LiDAR-IMU time-delay (LITD) estimation method, which is derived from the proposed LSPP tracking method. Extensive experiments were conducted on both public and private datasets. The results demonstrate that the proposed MSC-LIO yields higher accuracy and efficiency than the state-of-the-art methods. The ablation experiment results indicate that the data-association efficiency is improved by nearly 3 times using the LSPP tracking method. Besides, the proposed LITD estimation method can effectively and accurately estimate the LITD.
Read more8/13/2024