MSC-LIO: An MSCKF-Based LiDAR-Inertial Odometry with Same-Plane-Point Tracking

0
🗣️
Sign in to get full access
Overview
- The paper proposes a new LiDAR-inertial odometry system called MSC-LIO, which is based on the multi-state constraint Kalman filter (MSCKF) framework.
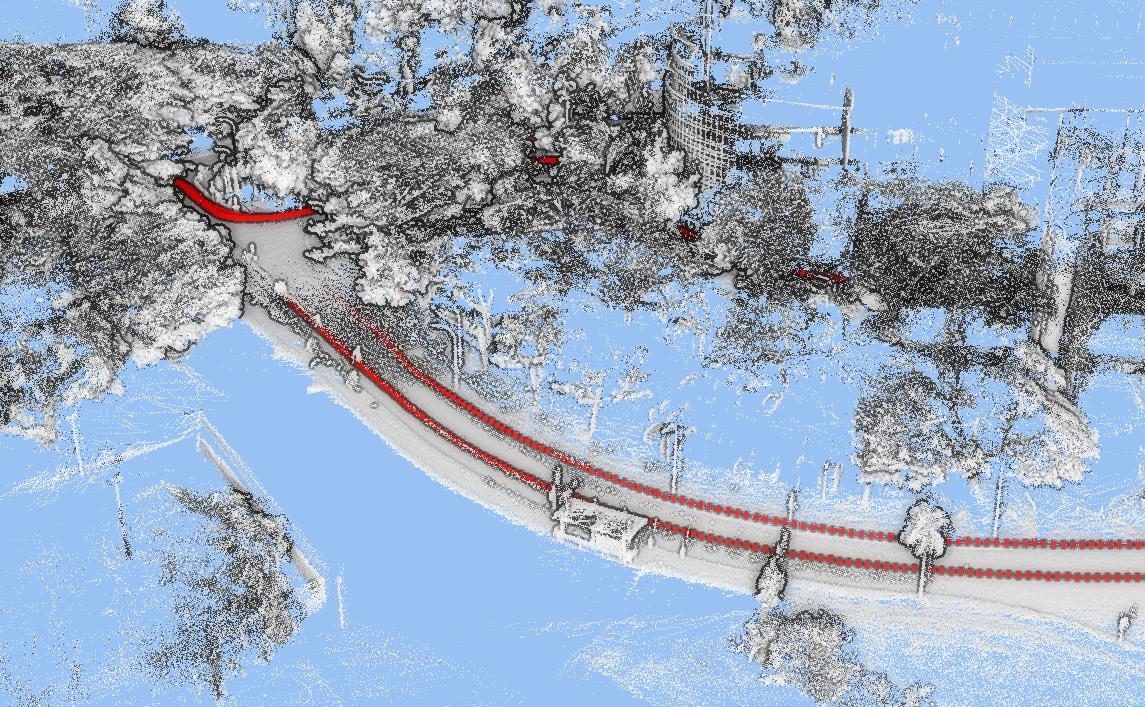
- It introduces an efficient LiDAR same-plane-point (LSPP) tracking method for frame-to-frame data associations, without explicit feature extraction.
- The paper also presents an effective point-velocity-based LiDAR-IMU time-delay (LITD) estimation method.
- Extensive experiments on public and private datasets show that MSC-LIO achieves higher accuracy and efficiency compared to the state-of-the-art methods.
Plain English Explanation
The paper describes a new system for estimating the position and orientation of a mobile robot or vehicle using data from LiDAR (Light Detection and Ranging) sensors and inertial measurement units (IMUs). This type of system, known as LiDAR-inertial odometry, is important for applications like self-driving cars, drones, and robots that need to navigate accurately in 3D environments.
The key innovation in this paper is the use of the multi-state constraint Kalman filter (MSCKF) framework, which has been shown to be more efficient than traditional graph optimization methods for visual-based odometry. The authors apply this MSCKF approach to LiDAR-based odometry for the first time, creating a system called MSC-LIO.
To make this work, the authors developed two new techniques:
-
LiDAR same-plane-point (LSPP) tracking: This method tracks natural features in the LiDAR data (points that lie on flat surfaces) without needing to explicitly detect and extract them, which is computationally expensive. This improves the efficiency of the data association process.
-
LiDAR-IMU time-delay (LITD) estimation: LiDAR and IMU sensors do not perfectly synchronize, so the authors developed a method to accurately estimate the time delay between them, which is important for fusing the data correctly.
Through experiments, the authors show that their MSC-LIO system outperforms other state-of-the-art LiDAR-inertial odometry methods in terms of both accuracy and efficiency. This could lead to more robust and reliable navigation systems for autonomous vehicles and robots.
Technical Explanation
The core of the proposed MSC-LIO system is the multi-state constraint Kalman filter (MSCKF) framework, which has been shown to be more efficient than graph optimization for visual-based odometry. The authors adapt this MSCKF approach to LiDAR-inertial odometry, creating a tightly coupled system that fuses data from LiDAR and IMU sensors.
The key components of the MSC-LIO system are:
-
LiDAR Same-Plane-Point (LSPP) Tracking: Instead of explicitly detecting and extracting visual features from the LiDAR data, the authors propose an efficient LSPP tracking method. This method identifies points that lie on flat surfaces in the environment and tracks them from frame to frame, without the computationally expensive feature extraction step.
-
LSPP Measurement Model: The tracked LSPP features are used to construct an LSPP measurement model, which forms the multi-state constraint in the MSCKF framework.
-
LiDAR-IMU Time-Delay (LITD) Estimation: Since LiDAR and IMU sensors are not perfectly synchronized, the authors develop a point-velocity-based method to accurately estimate the time delay between the two sensor measurements. This is crucial for properly fusing the data in the MSCKF.
The authors evaluate their MSC-LIO system on both public and private datasets, comparing it to several state-of-the-art LiDAR-inertial odometry methods. The results demonstrate that MSC-LIO achieves higher accuracy and efficiency than the baselines.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed MSC-LIO system, including comparisons to several state-of-the-art methods on both public and private datasets. The authors also provide ablation studies to demonstrate the contributions of the key components, such as the LSPP tracking and LITD estimation methods.
One potential limitation of the work is that it has only been evaluated in indoor and small-scale outdoor environments. It would be interesting to see how the system performs in larger-scale, more complex outdoor scenarios, such as those encountered in autonomous driving applications.
Additionally, the paper does not discuss the system's robustness to sensor failures or environmental changes, which are important considerations for real-world deployment. Future work could explore the system's behavior under these challenging conditions.
Overall, the paper makes a compelling case for the effectiveness of the MSCKF framework for LiDAR-inertial odometry and introduces some novel techniques that could be broadly applicable to other sensor fusion problems.
Conclusion
This paper presents a novel LiDAR-inertial odometry system called MSC-LIO, which is based on the multi-state constraint Kalman filter (MSCKF) framework. The key innovations are the efficient LiDAR same-plane-point (LSPP) tracking method and the effective point-velocity-based LiDAR-IMU time-delay (LITD) estimation approach.
Extensive experiments demonstrate that MSC-LIO outperforms state-of-the-art LiDAR-inertial odometry methods in terms of both accuracy and efficiency. This work could lead to significant improvements in the navigation capabilities of autonomous vehicles, robots, and other mobile systems that rely on accurate 3D localization.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🗣️
0
MSC-LIO: An MSCKF-Based LiDAR-Inertial Odometry with Same-Plane-Point Tracking
Tisheng Zhang, Man Yuan, Linfu Wei, Hailiang Tang, Xiaoji Niu
The multi-state constraint Kalman filter (MSCKF) has been proven to be more efficient than graph optimization for visual-based odometry while with similar accuracy. However, it has not yet been properly considered and studied for LiDAR-based odometry. In this paper, we propose a novel tightly coupled LiDAR-inertial odometry based on the MSCKF framework, named MSC-LIO. An efficient LiDAR same-plane-point (LSPP) tracking method, without explicit feature extraction, is present for frame-to-frame data associations. The tracked LSPPs are employed to build an LSPP measurement model, which constructs a multi-state constraint. Besides, we propose an effective point-velocity-based LiDAR-IMU time-delay (LITD) estimation method, which is derived from the proposed LSPP tracking method. Extensive experiments were conducted on both public and private datasets. The results demonstrate that the proposed MSC-LIO yields higher accuracy and efficiency than the state-of-the-art methods. The ablation experiment results indicate that the data-association efficiency is improved by nearly 3 times using the LSPP tracking method. Besides, the proposed LITD estimation method can effectively and accurately estimate the LITD.
Read more8/13/2024

0
LiDAR-Inertial Odometry Based on Extended Kalman Filter
Naoki Akai, Takumi Nakao
LiDAR-Inertial Odometry (LIO) is typically implemented using an optimization-based approach, with the factor graph often being employed due to its capability to seamlessly integrate residuals from both LiDAR and IMU measurements. Conversely, a recent study has demonstrated that accurate LIO can also be achieved using a loosely-coupled method. Inspired by this advancements, we present a LIO method that leverages the recursive Bayes filter, solved via the Extended Kalman Filter (EKF) - herein referred to as KLIO. Within KLIO, prior and likelihood distributions are computed using IMU preintegration and scan matching between LiDAR and local map point clouds, and the pose, velocity, and IMU biases are updated through the EKF process. Through experiments with the Newer College dataset, we demonstrate that KLIO achieves precise trajectory tracking and mapping. Its accuracy is comparable to that of the state-of-the-art methods in both tightly- and loosely-coupled methods.
Read more7/23/2024
💬
0
LIO-EKF: High Frequency LiDAR-Inertial Odometry using Extended Kalman Filters
Yibin Wu, Tiziano Guadagnino, Louis Wiesmann, Lasse Klingbeil, Cyrill Stachniss, Heiner Kuhlmann
Odometry estimation is crucial for every autonomous system requiring navigation in an unknown environment. In modern mobile robots, 3D LiDAR-inertial systems are often used for this task. By fusing LiDAR scans and IMU measurements, these systems can reduce the accumulated drift caused by sequentially registering individual LiDAR scans and provide a robust pose estimate. Although effective, LiDAR-inertial odometry systems require proper parameter tuning to be deployed. In this paper, we propose LIO-EKF, a tightly-coupled LiDAR-inertial odometry system based on point-to-point registration and the classical extended Kalman filter scheme. We propose an adaptive data association that considers the relative pose uncertainty, the map discretization errors, and the LiDAR noise. In this way, we can substantially reduce the parameters to tune for a given type of environment. The experimental evaluation suggests that the proposed system performs on par with the state-of-the-art LiDAR-inertial odometry pipelines but is significantly faster in computing the odometry. The source code of our implementation is publicly available (https://github.com/YibinWu/LIO-EKF).
Read more5/9/2024
0
Eigen Is All You Need: Efficient Lidar-Inertial Continuous-Time Odometry with Internal Association
Thien-Minh Nguyen, Xinhang Xu, Tongxing Jin, Yizhuo Yang, Jianping Li, Shenghai Yuan, Lihua Xie
In this paper, we propose a continuous-time lidar-inertial odometry (CT-LIO) system named SLICT2, which promotes two main insights. One, contrary to conventional wisdom, CT-LIO algorithm can be optimized by linear solvers in only a few iterations, which is more efficient than commonly used nonlinear solvers. Two, CT-LIO benefits more from the correct association than the number of iterations. Based on these ideas, we implement our method with a customized solver where the feature association process is performed immediately after each incremental step, and the solution can converge within a few iterations. Our implementation can achieve real-time performance with a high density of control points while yielding competitive performance in highly dynamical motion scenarios. We demonstrate the advantages of our method by comparing with other existing state-of-the-art CT-LIO methods. The source code will be released for the benefit of the community.
Read more6/10/2024