Semi-Elastic LiDAR-Inertial Odometry

0
↗️
Sign in to get full access
Overview
- Existing LiDAR-inertial state estimation assumes the state at the start of the current sweep is identical to the end of the last sweep
- If the last state is inaccurate, the current state cannot satisfy the constraints from LiDAR and IMU, leading to inconsistent state estimation (e.g., zigzag trajectory, oscillating velocity)
- This paper proposes a semi-elastic optimization-based LiDAR-inertial state estimation method to allow the state to be optimized to the correct value
- The approach aims to ensure accuracy, consistency, and robustness of state estimation
- The proposed method is incorporated into an optimization-based LiDAR-inertial odometry (LIO) framework
- Experiments on public datasets show the method outperforms existing LiDAR-inertial odometry systems in accuracy, consistency, and robustness
Plain English Explanation
The paper addresses a problem with existing LiDAR-inertial state estimation techniques. These methods assume the state (position, orientation, velocity) at the start of the current sensor sweep is identical to the end of the previous sweep. However, if the previous state was inaccurate, the current state cannot properly satisfy the constraints from the LiDAR and inertial measurement unit (IMU) data. This can lead to issues like a zigzag trajectory or high-frequency oscillations in the estimated velocity.
To address this, the paper proposes a new "semi-elastic" optimization-based LiDAR-inertial state estimation method. This approach allows the state to be optimized to the correct value, rather than being constrained by the previous state estimate. The goal is to ensure the state estimation is accurate, consistent, and robust.
The proposed method is incorporated into a broader LiDAR-inertial odometry (LIO) framework. Experiments on publicly available datasets show this new approach outperforms existing state-of-the-art LiDAR-inertial odometry systems in terms of accuracy, consistency, and robustness.
Technical Explanation
The key innovation in this paper is the "semi-elastic" optimization-based LiDAR-inertial state estimation method. Traditional LiDAR-inertial state estimation assumes the current state is identical to the end of the previous sweep. However, if the previous state estimate was inaccurate, this can lead to the current state being unable to satisfy the constraints from the LiDAR and IMU data.
The proposed semi-elastic optimization approach allows the state to be optimized to the correct value, rather than being strictly tied to the previous state. This provides sufficient "elasticity" in the state to ensure it can be optimized to accurately satisfy the LiDAR and IMU constraints. The authors incorporate this semi-elastic LiDAR-inertial state estimation into an optimization-based LiDAR-inertial odometry (LIO) framework.
Experiments on four public datasets show this semi-elastic optimization-based approach outperforms existing state-of-the-art LiDAR-inertial odometry systems in terms of accuracy, consistency, and robustness. Compared to traditional and purely elastic optimization methods, the semi-elastic approach can better ensure the state estimation satisfies the constraints from both the LiDAR and IMU data.
Critical Analysis
The paper addresses an important challenge in LiDAR-inertial state estimation - the issue of local inconsistency when the previous state estimate is inaccurate. The proposed semi-elastic optimization approach seems well-motivated and the experimental results are compelling, showing performance improvements over existing methods.
However, the paper does not provide much analysis of the potential limitations or weaknesses of the semi-elastic approach. For example, it's unclear how the method handles more significant changes in state between sweeps, or how it scales to very high-speed motions. Additionally, the authors do not discuss how sensitive the approach is to tuning of the various optimization parameters and constraints.
Further research could explore the robustness of the semi-elastic method under a wider range of operating conditions, as well as comparisons to other techniques like fusion-based LIO or learning-based approaches. Validating the method on more diverse datasets, including real-world environments with dynamic obstacles, would also help establish its general applicability.
Overall, this paper presents a promising new LiDAR-inertial state estimation technique that can improve the accuracy, consistency, and robustness of odometry estimation. Further analysis and validation of its capabilities and limitations would help advance the state of the art in this important area of robotics and perception.
Conclusion
This paper introduces a semi-elastic optimization-based LiDAR-inertial state estimation method to address issues with local inconsistency in existing LiDAR-inertial odometry approaches. By allowing the state to be optimized to the correct value rather than being constrained by the previous state estimate, the proposed technique can better satisfy the constraints from both LiDAR and IMU data.
Experiments show this semi-elastic approach outperforms state-of-the-art LiDAR-inertial odometry systems in terms of accuracy, consistency, and robustness. Incorporating this state estimation method into a broader LIO framework demonstrates its practical applicability for real-world robot perception and navigation tasks.
While the paper presents a compelling technical advance, further research is needed to fully understand the limitations and broader applicability of the semi-elastic optimization technique. Continued development and validation of this method could yield important improvements in the reliability and performance of LiDAR-inertial state estimation for robotics and autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
↗️
0
Semi-Elastic LiDAR-Inertial Odometry
Zikang Yuan, Fengtian Lang, Tianle Xu, Ruiye Ming, Chengwei Zhao, Xin Yang
Existing LiDAR-inertial state estimation assumes that the state at the beginning of current sweep is identical to the state at the end of last sweep. However, if the state at the end of last sweep is not accurate, the current state cannot satisfy the constraints from LiDAR and IMU consistently, ultimately resulting in local inconsistency of solved state (e.g., zigzag trajectory or high-frequency oscillating velocity). This paper proposes a semi-elastic optimization-based LiDAR-inertial state estimation method, which imparts sufficient elasticity to the state to allow it be optimized to the correct value. This approach can preferably ensure the accuracy, consistency, and robustness of state estimation. We incorporate the proposed LiDAR-inertial state estimation method into an optimization-based LiDAR-inertial odometry (LIO) framework. Experimental results on four public datasets demonstrate that: 1) our method outperforms existing state-of-the-art LiDAR-inertial odometry systems in terms of accuracy; 2) semi-elastic optimization-based LiDAR-inertial state estimation can better ensure consistency and robustness than traditional and elastic optimization-based LiDAR-inertial state estimation. We have released the source code of this work for the development of the community.
Read more7/8/2024
0
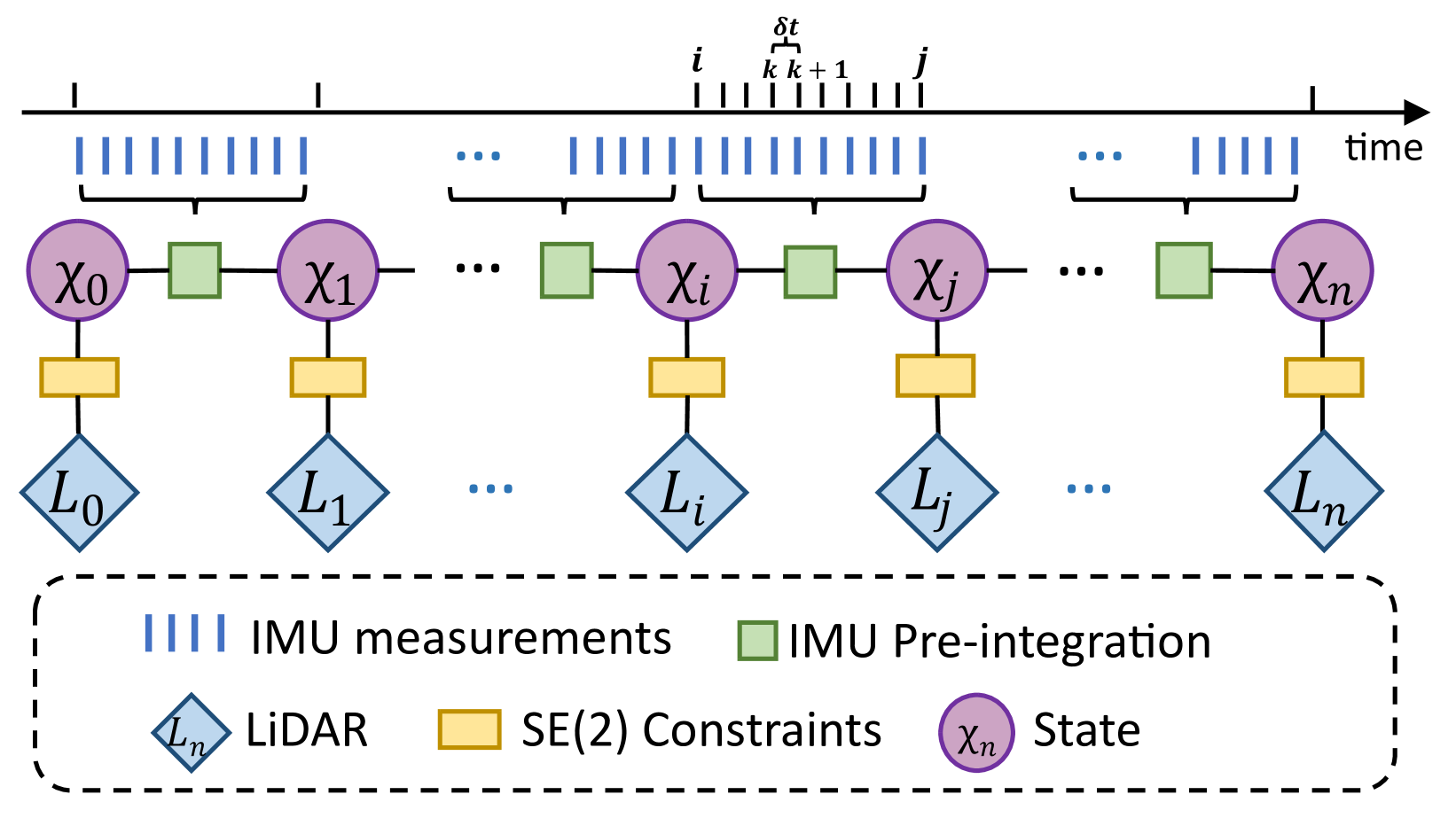
Versatile LiDAR-Inertial Odometry With SE (2) Constraints for Ground Vehicles
Jiaying Chen, Han Wang, Minghui Hu, Ponnuthurai Nagaratnam Suganthan
LiDAR SLAM has become one of the major localization systems for ground vehicles since LiDAR Odometry And Mapping (LOAM). Many extension works on LOAM mainly leverage one specific constraint to improve the performance, e.g., information from on-board sensors such as loop closure and inertial state; prior conditions such as ground level and motion dynamics. In many robotic applications, these conditions are often known partially, hence a SLAM system can be a comprehensive problem due to the existence of numerous constraints. Therefore, we can achieve a better SLAM result by fusing them properly. In this paper, we propose a hybrid LiDAR-inertial SLAM framework that leverages both the on-board perception system and prior information such as motion dynamics to improve localization performance. In particular, we consider the case for ground vehicles, which are commonly used for autonomous driving and warehouse logistics. We present a computationally efficient LiDAR-inertial odometry method that directly parameterizes ground vehicle poses on SE(2). The out-of-SE(2) motion perturbations are not neglected but incorporated into an integrated noise term of a novel SE(2)-constraints model. For odometric measurement processing, we propose a versatile, tightly coupled LiDAR-inertial odometry to achieve better pose estimation than traditional LiDAR odometry. Thorough experiments are performed to evaluate our proposed method's performance in different scenarios, including localization for both indoor and outdoor environments. The proposed method achieves superior performance in accuracy and robustness.
Read more4/3/2024

0
LOG-LIO2: A LiDAR-Inertial Odometry with Efficient Uncertainty Analysis
Kai Huang, Junqiao Zhao, Jiaye Lin, Zhongyang Zhu, Shuangfu Song, Chen Ye, Tiantian Feng
Uncertainty in LiDAR measurements, stemming from factors such as range sensing, is crucial for LIO (LiDAR-Inertial Odometry) systems as it affects the accurate weighting in the loss function. While recent LIO systems address uncertainty related to range sensing, the impact of incident angle on uncertainty is often overlooked by the community. Moreover, the existing uncertainty propagation methods suffer from computational inefficiency. This paper proposes a comprehensive point uncertainty model that accounts for both the uncertainties from LiDAR measurements and surface characteristics, along with an efficient local uncertainty analytical method for LiDAR-based state estimation problem. We employ a projection operator that separates the uncertainty into the ray direction and its orthogonal plane. Then, we derive incremental Jacobian matrices of eigenvalues and eigenvectors w.r.t. points, which enables a fast approximation of uncertainty propagation. This approach eliminates the requirement for redundant traversal of points, significantly reducing the time complexity of uncertainty propagation from $mathcal{O} (n)$ to $mathcal{O} (1)$ when a new point is added. Simulations and experiments on public datasets are conducted to validate the accuracy and efficiency of our formulations. The proposed methods have been integrated into a LIO system, which is available at https://github.com/tiev-tongji/LOG-LIO2.
Read more5/3/2024
0
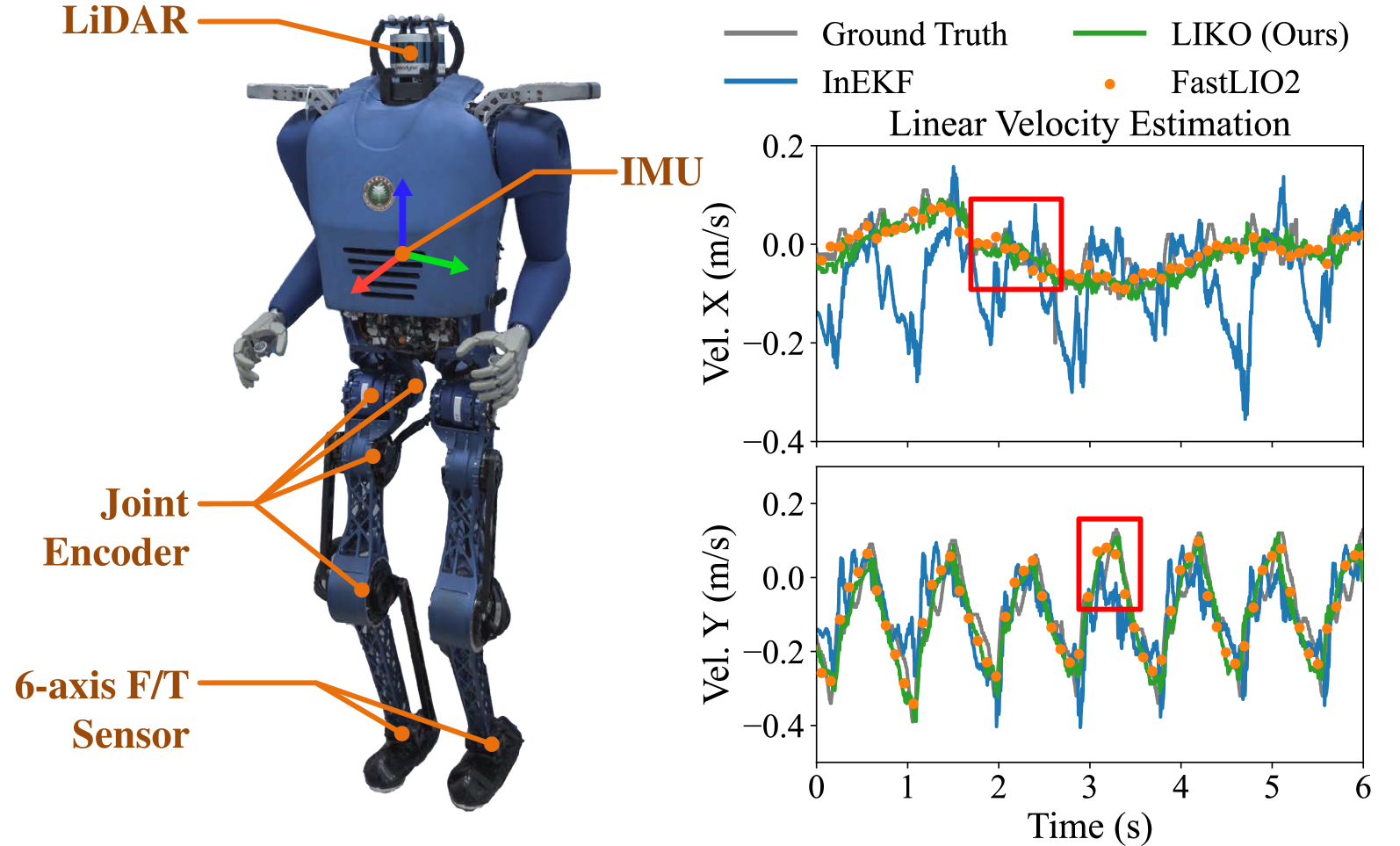
LIKO: LiDAR, Inertial, and Kinematic Odometry for Bipedal Robots
Qingrui Zhao, Mingyuan Li, Yongliang Shi, Xuechao Chen, Zhangguo Yu, Lianqiang Han, Zhenyuan Fu, Jintao Zhang, Chao Li, Yuanxi Zhang, Qiang Huang
High-frequency and accurate state estimation is crucial for biped robots. This paper presents a tightly-coupled LiDAR-Inertial-Kinematic Odometry (LIKO) for biped robot state estimation based on an iterated extended Kalman filter. Beyond state estimation, the foot contact position is also modeled and estimated. This allows for both position and velocity updates from kinematic measurement. Additionally, the use of kinematic measurement results in an increased output state frequency of about 1kHz. This ensures temporal continuity of the estimated state and makes it practical for control purposes of biped robots. We also announce a biped robot dataset consisting of LiDAR, inertial measurement unit (IMU), joint encoders, force/torque (F/T) sensors, and motion capture ground truth to evaluate the proposed method. The dataset is collected during robot locomotion, and our approach reached the best quantitative result among other LIO-based methods and biped robot state estimation algorithms. The dataset and source code will be available at https://github.com/Mr-Zqr/LIKO.
Read more4/30/2024