Multi-agent Assessment with QoS Enhancement for HD Map Updates in a Vehicular Network

0

Sign in to get full access
Overview
- The paper proposes a multi-agent assessment approach to enhance the quality of service (QoS) for high-definition (HD) map updates in a vehicular network.
- The key goals are to reduce latency and prioritize the most critical map updates during periods of network contention.
- The proposed solution leverages a combination of techniques, including contention window adjustment, prioritization, and LiDAR data fusion.
Plain English Explanation
Vehicles on the road rely on detailed digital maps, known as HD maps, to navigate safely and accurately. These maps need to be constantly updated as the real-world environment changes, such as when new construction or road closures occur. However, when many vehicles try to send map updates to a central server at the same time, it can create network congestion and delays, which can be a problem for time-sensitive applications like autonomous driving.
This paper proposes a solution to address this challenge. The key idea is to use a "multi-agent" approach, where each vehicle acts as an independent agent that can assess the importance of its map updates and adjust its behavior accordingly. For example, a vehicle might detect that a critical road closure has just occurred and prioritize sending that update over less important changes.
The system uses a few techniques to achieve this:
-
Contention window adjustment: The vehicles can dynamically adjust the time window in which they are allowed to transmit updates, reducing collisions and improving overall throughput.
-
Prioritization: The vehicles can assess the importance of their map updates and prioritize the most critical ones, ensuring they get delivered first.
-
LiDAR data fusion: The vehicles can combine sensor data from their on-board LiDAR systems to more accurately detect changes to the environment and generate higher-quality map updates.
By using these techniques, the proposed system can help reduce network congestion, ensure that the most important map updates are delivered quickly, and ultimately improve the safety and reliability of autonomous driving systems.
Technical Explanation
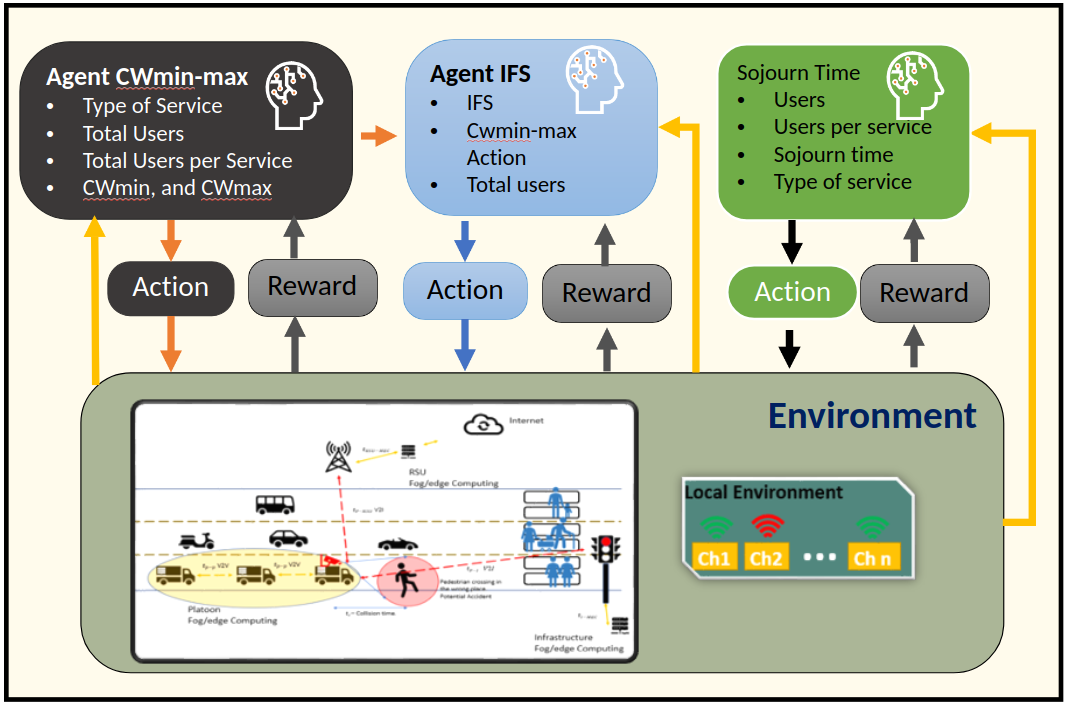
The paper introduces a multi-agent approach to manage the distribution of high-definition (HD) map updates in a vehicular network. The key objective is to enhance the quality of service (QoS) by reducing latency and prioritizing the most critical map updates during periods of network contention.
The proposed solution consists of three main components:
-
Contention window adjustment: The vehicles dynamically adjust their contention window sizes based on the network conditions and the urgency of their map updates. This helps to reduce collisions and improve overall throughput.
-
Prioritization: Each vehicle assesses the importance of its map updates and assigns them different access categories (ACs). The higher-priority updates are transmitted first, ensuring the most critical information is delivered in a timely manner.
-
LiDAR data fusion: The vehicles combine sensor data from their on-board LiDAR systems to more accurately detect changes in the environment and generate high-quality map updates.
The authors evaluate the proposed approach through extensive simulations and show that it can significantly improve the QoS of HD map updates compared to traditional methods. The results demonstrate reduced latency, higher delivery rates, and better resource utilization.
Critical Analysis
The paper presents a comprehensive solution to the challenge of efficiently distributing HD map updates in a highly dynamic vehicular network. The multi-agent approach, with its focus on contention window adjustment, prioritization, and LiDAR data fusion, offers a promising way to address the key issues of network congestion and latency.
One potential limitation of the study is that it is based on simulation data, and the authors acknowledge the need for further validation through real-world experiments. Additionally, the impact of factors such as varying vehicle densities, network topology changes, and environmental conditions on the system's performance could be explored in more depth.
Furthermore, the paper does not discuss the computational and communication overhead associated with the proposed techniques, which could be an important consideration for resource-constrained vehicular systems. Addressing these aspects in future research could provide a more comprehensive understanding of the practical implications and trade-offs of the proposed solution.
Conclusion
The paper presents a multi-agent assessment approach to enhance the quality of service (QoS) for high-definition (HD) map updates in a vehicular network. By leveraging techniques such as contention window adjustment, prioritization, and LiDAR data fusion, the proposed system can effectively reduce latency and ensure that the most critical map updates are delivered in a timely manner, even during periods of network congestion.
The findings of this research have important implications for the development of reliable and safe autonomous driving systems, which rely on accurate and up-to-date HD maps to navigate the real-world environment. By addressing the challenges of efficient map update distribution, this work contributes to the ongoing efforts to realize the full potential of autonomous vehicles and enhance the overall safety and performance of vehicular networks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-agent Assessment with QoS Enhancement for HD Map Updates in a Vehicular Network
Jeffrey Redondo, Nauman Aslam, Juan Zhang, Zhenhui Yuan
Reinforcement Learning (RL) algorithms have been used to address the challenging problems in the offloading process of vehicular ad hoc networks (VANET). More recently, they have been utilized to improve the dissemination of high-definition (HD) Maps. Nevertheless, implementing solutions such as deep Q-learning (DQN) and Actor-critic at the autonomous vehicle (AV) may lead to an increase in the computational load, causing a heavy burden on the computational devices and higher costs. Moreover, their implementation might raise compatibility issues between technologies due to the required modifications to the standards. Therefore, in this paper, we assess the scalability of an application utilizing a Q-learning single-agent solution in a distributed multi-agent environment. This application improves the network performance by taking advantage of a smaller state, and action space whilst using a multi-agent approach. The proposed solution is extensively evaluated with different test cases involving reward function considering individual or overall network performance, number of agents, and centralized and distributed learning comparison. The experimental results demonstrate that the time latencies of our proposed solution conducted in voice, video, HD Map, and best-effort cases have significant improvements, with 40.4%, 36%, 43%, and 12% respectively, compared to the performances with the single-agent approach.
Read more8/1/2024

0
Coverage-aware and Reinforcement Learning Using Multi-agent Approach for HD Map QoS in a Realistic Environment
Jeffrey Redondo, Zhenhui Yuan, Nauman Aslam, Juan Zhang
One effective way to optimize the offloading process is by minimizing the transmission time. This is particularly true in a Vehicular Adhoc Network (VANET) where vehicles frequently download and upload High-definition (HD) map data which requires constant updates. This implies that latency and throughput requirements must be guaranteed by the wireless system. To achieve this, adjustable contention windows (CW) allocation strategies in the standard IEEE802.11p have been explored by numerous researchers. Nevertheless, their implementations demand alterations to the existing standard which is not always desirable. To address this issue, we proposed a Q-Learning algorithm that operates at the application layer. Moreover, it could be deployed in any wireless network thereby mitigating the compatibility issues. The solution has demonstrated a better network performance with relatively fewer optimization requirements as compared to the Deep Q Network (DQN) and Actor-Critic algorithms. The same is observed while evaluating the model in a multi-agent setup showing higher performance compared to the single-agent setup.
Read more8/9/2024
0
Optimizing QoS in HD Map Updates: Cross-Layer Multi-Agent with Hierarchical and Independent Learning
Jeffrey Redondo, Nauman Aslam, Juan Zhang, Zhenhui Yuan
The data collected by autonomous vehicle (AV) sensors such as LiDAR and cameras is crucial for creating high-definition (HD) maps to provide higher accuracy and enable a higher level of automation. Nevertheless, offloading this large volume of raw data to edge servers leads to increased latency due to network congestion in highly dense environments such as Vehicular Adhoc networks (VANET). To address this challenge, researchers have focused on the dynamic allocation of minimum contention window (CWmin) value. While this approach could be sufficient for fairness, it might not be adequate for prioritizing different services, as it also involves other parameters such as maximum contention window (CWmax) and infer-frame space number (IFSn). In response to this, we extend the scope of previous solutions to include the control of not only CWmin but also the adjustment of two other parameters in the standard IEEE802.11: CWmax and IFSn, alongside waiting transmission time. To achieve this, we introduced a methodology involving a cross-layer solution between the application and MAC layers. Additionally, we utilised multi-agent techniques, emphasising a hierarchical structure and independent learning (IL) to improve latency to efficiently handle map updates while interacting with multiple services. This approach demonstrated an improvement in latency against the standard IEEE802.11p EDCA by $31%$, $49%$, $87.3%$, and $64%$ for Voice, Video, HD Map, and Best-effort, respectively.
Read more8/22/2024
0
DNN Partitioning, Task Offloading, and Resource Allocation in Dynamic Vehicular Networks: A Lyapunov-Guided Diffusion-Based Reinforcement Learning Approach
Zhang Liu, Hongyang Du, Junzhe Lin, Zhibin Gao, Lianfen Huang, Seyyedali Hosseinalipour, Dusit Niyato
The rapid advancement of Artificial Intelligence (AI) has introduced Deep Neural Network (DNN)-based tasks to the ecosystem of vehicular networks. These tasks are often computation-intensive, requiring substantial computation resources, which are beyond the capability of a single vehicle. To address this challenge, Vehicular Edge Computing (VEC) has emerged as a solution, offering computing services for DNN-based tasks through resource pooling via Vehicle-to-Vehicle/Infrastructure (V2V/V2I) communications. In this paper, we formulate the problem of joint DNN partitioning, task offloading, and resource allocation in VEC as a dynamic long-term optimization. Our objective is to minimize the DNN-based task completion time while guaranteeing the system stability over time. To this end, we first leverage a Lyapunov optimization technique to decouple the original long-term optimization with stability constraints into a per-slot deterministic problem. Afterwards, we propose a Multi-Agent Diffusion-based Deep Reinforcement Learning (MAD2RL) algorithm, incorporating the innovative use of diffusion models to determine the optimal DNN partitioning and task offloading decisions. Furthermore, we integrate convex optimization techniques into MAD2RL as a subroutine to allocate computation resources, enhancing the learning efficiency. Through simulations under real-world movement traces of vehicles, we demonstrate the superior performance of our proposed algorithm compared to existing benchmark solutions.
Read more6/12/2024