Coverage-aware and Reinforcement Learning Using Multi-agent Approach for HD Map QoS in a Realistic Environment

0

Sign in to get full access
Overview
- The paper presents a multi-agent reinforcement learning approach to enhance the quality of service (QoS) for high-definition (HD) maps in a realistic vehicular network environment.
- The approach aims to address coverage and reliability challenges in vehicular networks by leveraging reinforcement learning techniques.
- The proposed system uses multiple agents to cooperatively learn and optimize the HD map QoS, considering factors such as vehicle mobility, network connectivity, and environmental conditions.
Plain English Explanation
In this paper, the researchers have developed a multi-agent reinforcement learning system to improve the quality of service (QoS) for high-definition (HD) maps in a realistic vehicular network environment.
The key challenge they're addressing is the coverage and reliability issues that can arise in vehicular networks, where vehicles are constantly moving and the network conditions can change rapidly. To tackle this, the researchers have employed a multi-agent approach, where multiple "agents" (software programs) work together to learn and optimize the HD map QoS.
Each agent is responsible for gathering information about the network conditions, vehicle mobility, and other relevant factors. They then use reinforcement learning techniques to collaborate and make decisions that will improve the overall QoS for the HD maps. This could involve, for example, adjusting the distribution of map data or the communication channels used to deliver the maps to the vehicles.
The key advantage of this approach is that it can adapt to the constantly changing conditions in a realistic vehicular network, providing better coverage and reliability for the HD maps compared to more static or centralized solutions.
Technical Explanation
The paper presents a coverage-aware and reinforcement learning-based multi-agent approach for enhancing the quality of service (QoS) of high-definition (HD) maps in a realistic vehicular network environment.
The system consists of multiple agents, each responsible for monitoring and optimizing the QoS for a specific region or aspect of the HD map distribution. These agents use Q-learning, a type of reinforcement learning, to collaborate and make decisions that maximize the overall QoS.
The agents consider factors such as vehicle mobility, network connectivity, and environmental conditions to assess the current QoS and take appropriate actions. For example, they may adjust the distribution of map data or the communication channels used to deliver the maps to the vehicles, based on the changing network conditions.
The researchers have developed a realistic simulation environment to evaluate the performance of their approach. They compare it to a baseline system and demonstrate that the multi-agent reinforcement learning approach can significantly improve the coverage and reliability of the HD maps, providing better QoS for the end-users.
Critical Analysis
The paper presents a well-designed and thorough approach to addressing the challenges of quality of service for HD maps in vehicular networks. The use of multi-agent reinforcement learning is a promising solution, as it allows the system to adapt to the dynamic and complex conditions of a realistic driving environment.
One potential limitation of the research is the reliance on simulation. While the authors have made efforts to create a realistic simulation environment, it may not fully capture the nuances and unpredictability of a real-world vehicular network. Validating the approach in a real-world deployment would provide additional insights and help to identify any potential issues or edge cases that may not have been accounted for in the simulation.
Additionally, the paper does not discuss the computational and resource requirements of the multi-agent system. As the number of agents and the complexity of the environment increase, the overhead of the system may become a concern, particularly in resource-constrained edge computing scenarios. Addressing these practical considerations would further strengthen the applicability and scalability of the proposed approach.
Overall, the research presented in this paper is a valuable contribution to the field of vehicular networks and quality of service management. The multi-agent reinforcement learning approach offers a promising solution to the challenges of HD map delivery in dynamic and complex environments.
Conclusion
This paper introduces a multi-agent reinforcement learning system to enhance the quality of service for high-definition maps in a realistic vehicular network environment. The key innovation is the use of multiple intelligent agents that collaborate to optimize the map distribution and delivery, adapting to factors such as vehicle mobility, network connectivity, and environmental conditions.
The results demonstrate the effectiveness of this approach in improving coverage and reliability, providing better quality of service for the end-users. While the reliance on simulation is a potential limitation, the overall concept and design of the system offer valuable insights for researchers and practitioners working on vehicular network solutions.
As the demand for high-quality, real-time mapping data continues to grow in the autonomous driving and smart transportation domains, the techniques presented in this paper could play a key role in ensuring the quality of service and reliability of the underlying HD map infrastructure.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Coverage-aware and Reinforcement Learning Using Multi-agent Approach for HD Map QoS in a Realistic Environment
Jeffrey Redondo, Zhenhui Yuan, Nauman Aslam, Juan Zhang
One effective way to optimize the offloading process is by minimizing the transmission time. This is particularly true in a Vehicular Adhoc Network (VANET) where vehicles frequently download and upload High-definition (HD) map data which requires constant updates. This implies that latency and throughput requirements must be guaranteed by the wireless system. To achieve this, adjustable contention windows (CW) allocation strategies in the standard IEEE802.11p have been explored by numerous researchers. Nevertheless, their implementations demand alterations to the existing standard which is not always desirable. To address this issue, we proposed a Q-Learning algorithm that operates at the application layer. Moreover, it could be deployed in any wireless network thereby mitigating the compatibility issues. The solution has demonstrated a better network performance with relatively fewer optimization requirements as compared to the Deep Q Network (DQN) and Actor-Critic algorithms. The same is observed while evaluating the model in a multi-agent setup showing higher performance compared to the single-agent setup.
Read more8/9/2024

0
Multi-agent Assessment with QoS Enhancement for HD Map Updates in a Vehicular Network
Jeffrey Redondo, Nauman Aslam, Juan Zhang, Zhenhui Yuan
Reinforcement Learning (RL) algorithms have been used to address the challenging problems in the offloading process of vehicular ad hoc networks (VANET). More recently, they have been utilized to improve the dissemination of high-definition (HD) Maps. Nevertheless, implementing solutions such as deep Q-learning (DQN) and Actor-critic at the autonomous vehicle (AV) may lead to an increase in the computational load, causing a heavy burden on the computational devices and higher costs. Moreover, their implementation might raise compatibility issues between technologies due to the required modifications to the standards. Therefore, in this paper, we assess the scalability of an application utilizing a Q-learning single-agent solution in a distributed multi-agent environment. This application improves the network performance by taking advantage of a smaller state, and action space whilst using a multi-agent approach. The proposed solution is extensively evaluated with different test cases involving reward function considering individual or overall network performance, number of agents, and centralized and distributed learning comparison. The experimental results demonstrate that the time latencies of our proposed solution conducted in voice, video, HD Map, and best-effort cases have significant improvements, with 40.4%, 36%, 43%, and 12% respectively, compared to the performances with the single-agent approach.
Read more8/1/2024
0
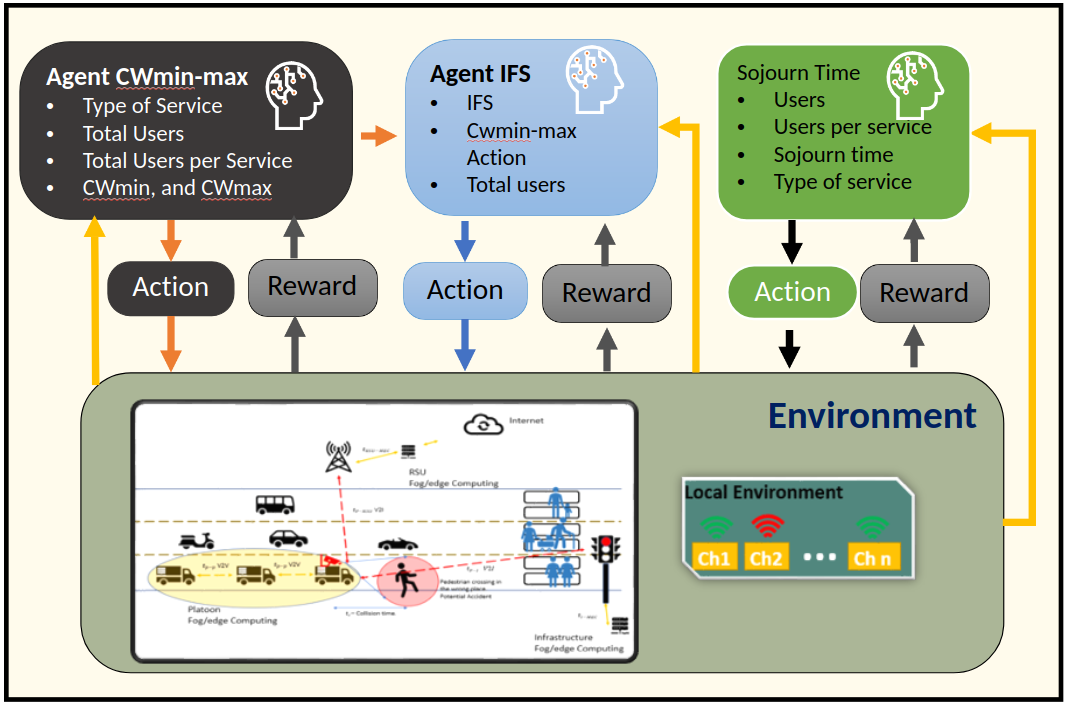
Optimizing QoS in HD Map Updates: Cross-Layer Multi-Agent with Hierarchical and Independent Learning
Jeffrey Redondo, Nauman Aslam, Juan Zhang, Zhenhui Yuan
The data collected by autonomous vehicle (AV) sensors such as LiDAR and cameras is crucial for creating high-definition (HD) maps to provide higher accuracy and enable a higher level of automation. Nevertheless, offloading this large volume of raw data to edge servers leads to increased latency due to network congestion in highly dense environments such as Vehicular Adhoc networks (VANET). To address this challenge, researchers have focused on the dynamic allocation of minimum contention window (CWmin) value. While this approach could be sufficient for fairness, it might not be adequate for prioritizing different services, as it also involves other parameters such as maximum contention window (CWmax) and infer-frame space number (IFSn). In response to this, we extend the scope of previous solutions to include the control of not only CWmin but also the adjustment of two other parameters in the standard IEEE802.11: CWmax and IFSn, alongside waiting transmission time. To achieve this, we introduced a methodology involving a cross-layer solution between the application and MAC layers. Additionally, we utilised multi-agent techniques, emphasising a hierarchical structure and independent learning (IL) to improve latency to efficiently handle map updates while interacting with multiple services. This approach demonstrated an improvement in latency against the standard IEEE802.11p EDCA by $31%$, $49%$, $87.3%$, and $64%$ for Voice, Video, HD Map, and Best-effort, respectively.
Read more8/22/2024
🤿
0
Exploiting Deep Reinforcement Learning for Edge Caching in Cell-Free Massive MIMO Systems
Yu Zhang, Shuaifei Chen, Jiayi Zhang
Cell-free massive multiple-input-multiple-output is promising to meet the stringent quality-of-experience (QoE) requirements of railway wireless communications by coordinating many successional access points (APs) to serve the onboard users coherently. A key challenge is how to deliver the desired contents timely due to the radical changing propagation environment caused by the growing train speed. In this paper, we propose to proactively cache the likely-requesting contents at the upcoming APs which perform the coherent transmission to reduce end-to-end delay. A long-term QoE-maximization problem is formulated and two cache placement algorithms are proposed. One is based on heuristic convex optimization (HCO) and the other exploits deep reinforcement learning (DRL) with soft actor-critic (SAC). Compared to the conventional benchmark, numerical results show the advantage of our proposed algorithms on QoE and hit probability. With the advanced DRL model, SAC outperforms HCO on QoE by predicting the user requests accurately.
Read more9/12/2024