Optimizing QoS in HD Map Updates: Cross-Layer Multi-Agent with Hierarchical and Independent Learning

0
Sign in to get full access
Overview
- Optimizes quality of service (QoS) for high-definition (HD) map updates using a cross-layer multi-agent approach with hierarchical and independent learning.
- Addresses challenges of resource-constrained environments, heterogeneous agents, and dynamic network conditions.
- Proposes a hierarchical and independent learning framework to coordinate agent actions and optimize QoS.
Plain English Explanation
This research paper focuses on improving the quality of service (QoS) for the process of updating high-definition (HD) maps, which are crucial for autonomous vehicles and other applications. The key challenge is that the environment where these updates occur can be resource-constrained, with heterogeneous agents (such as vehicles, roadside units, and mobile devices) operating in a dynamic network.
To address this, the researchers have developed a cross-layer multi-agent approach that uses a combination of hierarchical and independent learning. The hierarchical aspect coordinates the actions of the different agents, while the independent learning allows each agent to optimize its own performance based on local information.
The core idea is to create a system where the agents can work together efficiently to ensure that the HD map updates are completed quickly and with high quality, even in challenging environments with limited resources and changing conditions. This could have important implications for the development of autonomous vehicles and other applications that rely on up-to-date, high-quality maps.
Technical Explanation
The paper proposes a cross-layer multi-agent framework to optimize the QoS of HD map updates. The framework consists of a hierarchical and independent learning approach to coordinate the actions of heterogeneous agents, such as vehicles, roadside units, and mobile devices, in a resource-constrained and dynamic network environment.
At the higher level, the hierarchical component coordinates the agent actions to optimize global objectives, like minimizing update latency and maximizing coverage. At the lower level, the independent learning component allows each agent to optimize its own performance based on local information, such as resource availability and network conditions.
The researchers design a multi-UAV-aided wireless-powered dynamic system to evaluate the proposed framework, demonstrating its effectiveness in improving QoS metrics compared to conventional approaches.
Critical Analysis
The paper presents a novel and promising approach to optimizing QoS for HD map updates in resource-constrained and dynamic environments. The key strengths of the research include the cross-layer multi-agent framework, the hierarchical and independent learning components, and the practical evaluation using a multi-UAV-aided wireless-powered system.
However, the paper does not address several important limitations and potential issues. For example, the framework assumes a certain level of cooperation and information sharing among the heterogeneous agents, which may not always be feasible in real-world scenarios. Additionally, the evaluation is limited to a specific use case and does not explore the generalizability of the approach to other types of networks or applications.
Further research is needed to address these concerns and explore the robustness and scalability of the proposed solution. Potential areas for future work include investigating more decentralized and privacy-preserving coordination mechanisms, as well as exploring the integration of the framework with other emerging technologies, such as edge computing and blockchain.
Conclusion
This research paper presents a promising approach to optimizing the quality of service for high-definition map updates in resource-constrained and dynamic environments. By leveraging a cross-layer multi-agent framework with hierarchical and independent learning, the proposed solution aims to coordinate the actions of heterogeneous agents, such as vehicles, roadside units, and mobile devices, to improve key QoS metrics like update latency and coverage.
The evaluation of the framework using a multi-UAV-aided wireless-powered system demonstrates its effectiveness, but also highlights the need for further research to address potential limitations and explore the broader applicability of the approach. Nonetheless, the paper makes a valuable contribution to the field of autonomous systems and intelligent transportation, and its insights could have important implications for the development of advanced mapping technologies and applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Optimizing QoS in HD Map Updates: Cross-Layer Multi-Agent with Hierarchical and Independent Learning
Jeffrey Redondo, Nauman Aslam, Juan Zhang, Zhenhui Yuan
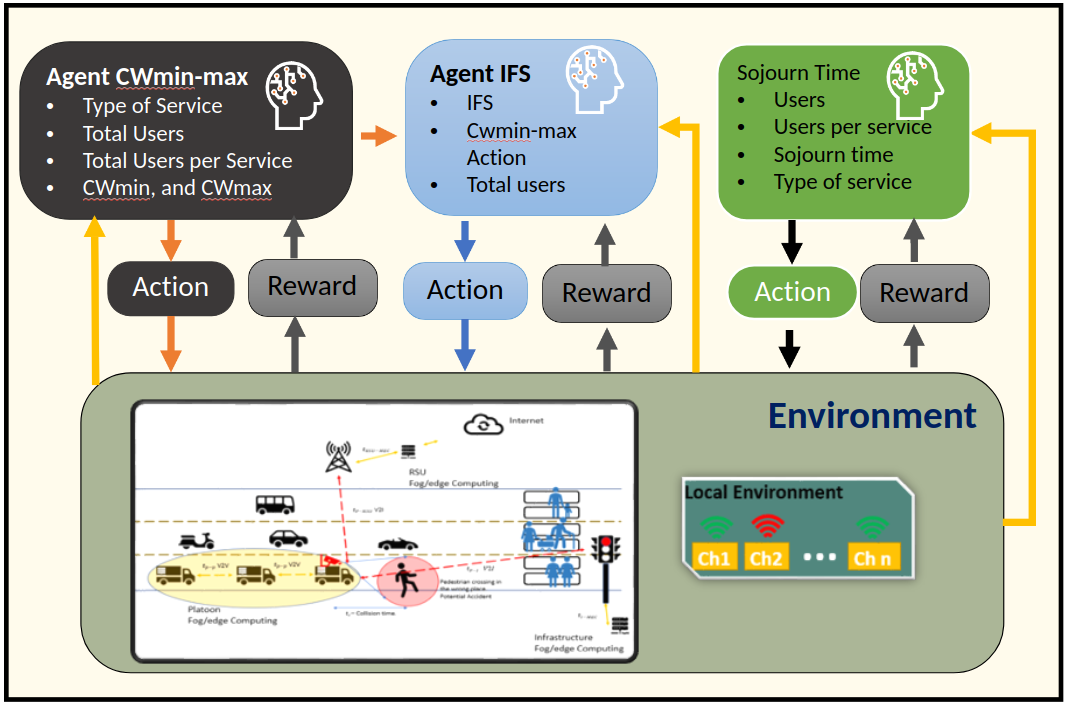
The data collected by autonomous vehicle (AV) sensors such as LiDAR and cameras is crucial for creating high-definition (HD) maps to provide higher accuracy and enable a higher level of automation. Nevertheless, offloading this large volume of raw data to edge servers leads to increased latency due to network congestion in highly dense environments such as Vehicular Adhoc networks (VANET). To address this challenge, researchers have focused on the dynamic allocation of minimum contention window (CWmin) value. While this approach could be sufficient for fairness, it might not be adequate for prioritizing different services, as it also involves other parameters such as maximum contention window (CWmax) and infer-frame space number (IFSn). In response to this, we extend the scope of previous solutions to include the control of not only CWmin but also the adjustment of two other parameters in the standard IEEE802.11: CWmax and IFSn, alongside waiting transmission time. To achieve this, we introduced a methodology involving a cross-layer solution between the application and MAC layers. Additionally, we utilised multi-agent techniques, emphasising a hierarchical structure and independent learning (IL) to improve latency to efficiently handle map updates while interacting with multiple services. This approach demonstrated an improvement in latency against the standard IEEE802.11p EDCA by $31%$, $49%$, $87.3%$, and $64%$ for Voice, Video, HD Map, and Best-effort, respectively.
Read more8/22/2024

0
Coverage-aware and Reinforcement Learning Using Multi-agent Approach for HD Map QoS in a Realistic Environment
Jeffrey Redondo, Zhenhui Yuan, Nauman Aslam, Juan Zhang
One effective way to optimize the offloading process is by minimizing the transmission time. This is particularly true in a Vehicular Adhoc Network (VANET) where vehicles frequently download and upload High-definition (HD) map data which requires constant updates. This implies that latency and throughput requirements must be guaranteed by the wireless system. To achieve this, adjustable contention windows (CW) allocation strategies in the standard IEEE802.11p have been explored by numerous researchers. Nevertheless, their implementations demand alterations to the existing standard which is not always desirable. To address this issue, we proposed a Q-Learning algorithm that operates at the application layer. Moreover, it could be deployed in any wireless network thereby mitigating the compatibility issues. The solution has demonstrated a better network performance with relatively fewer optimization requirements as compared to the Deep Q Network (DQN) and Actor-Critic algorithms. The same is observed while evaluating the model in a multi-agent setup showing higher performance compared to the single-agent setup.
Read more8/9/2024

0
Multi-agent Assessment with QoS Enhancement for HD Map Updates in a Vehicular Network
Jeffrey Redondo, Nauman Aslam, Juan Zhang, Zhenhui Yuan
Reinforcement Learning (RL) algorithms have been used to address the challenging problems in the offloading process of vehicular ad hoc networks (VANET). More recently, they have been utilized to improve the dissemination of high-definition (HD) Maps. Nevertheless, implementing solutions such as deep Q-learning (DQN) and Actor-critic at the autonomous vehicle (AV) may lead to an increase in the computational load, causing a heavy burden on the computational devices and higher costs. Moreover, their implementation might raise compatibility issues between technologies due to the required modifications to the standards. Therefore, in this paper, we assess the scalability of an application utilizing a Q-learning single-agent solution in a distributed multi-agent environment. This application improves the network performance by taking advantage of a smaller state, and action space whilst using a multi-agent approach. The proposed solution is extensively evaluated with different test cases involving reward function considering individual or overall network performance, number of agents, and centralized and distributed learning comparison. The experimental results demonstrate that the time latencies of our proposed solution conducted in voice, video, HD Map, and best-effort cases have significant improvements, with 40.4%, 36%, 43%, and 12% respectively, compared to the performances with the single-agent approach.
Read more8/1/2024
0
Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles
Nazish Tahir, Ramviyas Parasuraman, Haijian Sun
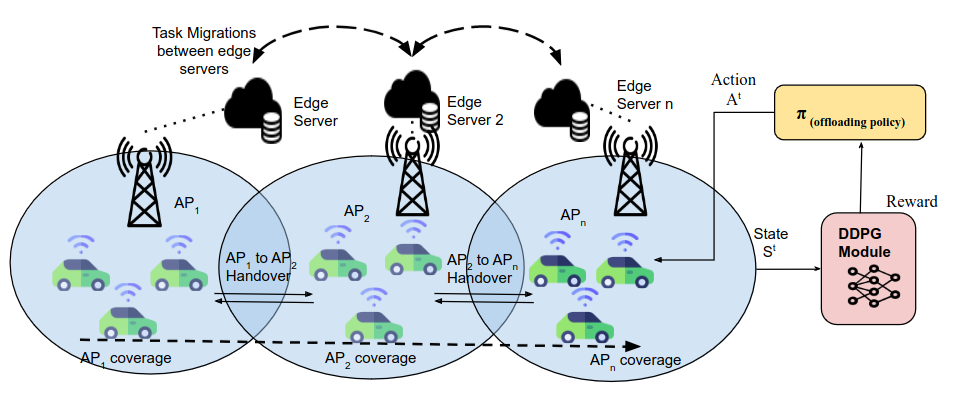
Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency.
Read more8/9/2024