Multi-Agent Reinforcement Learning for Autonomous Driving: A Survey

0

Sign in to get full access
Overview
- Provides a comprehensive survey of multi-agent reinforcement learning (MARL) techniques for autonomous driving applications
- Covers key challenges, existing approaches, and future research directions in this field
- Aims to serve as a valuable resource for researchers and practitioners working on MARL-based autonomous driving systems
Plain English Explanation
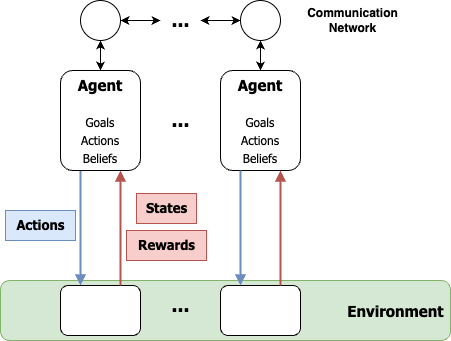
Multi-agent reinforcement learning (MARL) is a powerful technique that allows autonomous vehicles to learn how to navigate and interact with each other in complex driving environments. This survey paper examines how MARL is being used to develop advanced autonomous driving systems.
The paper starts by discussing the unique challenges of autonomous driving, such as the need for vehicles to cooperate and coordinate their actions in real-time to avoid collisions and traffic jams. It then provides an overview of the different MARL approaches that researchers have explored to address these challenges, including distributed decision-making, communication-aware learning, and simulation-based training.
The paper also discusses the various autonomous driving benchmarks and simulation environments that researchers use to evaluate and compare the performance of their MARL algorithms. These include realistic driving scenarios, such as intersections, highways, and urban settings, that allow researchers to assess how well their algorithms can handle complex, dynamic driving situations.
Overall, this survey provides a comprehensive overview of the state-of-the-art in MARL for autonomous driving, highlighting the key challenges, existing solutions, and promising directions for future research in this rapidly evolving field.
Technical Explanation
The paper begins by introducing the challenges of autonomous driving, which requires vehicles to navigate complex, dynamic environments and coordinate their actions with other agents (i.e., other vehicles, pedestrians, cyclists, etc.) in real-time. The authors argue that multi-agent reinforcement learning (MARL) is a promising approach for addressing these challenges, as it allows autonomous vehicles to learn optimal driving strategies through interaction and feedback in simulated or real-world environments.
The paper then provides a detailed overview of the existing MARL research for autonomous driving, categorizing the approaches into three main areas:
-
Distributed decision-making: These methods focus on enabling each vehicle to make autonomous decisions based on its local observations and interactions with nearby agents, without relying on a centralized controller.
-
Communication-aware learning: These approaches incorporate explicit communication channels between vehicles, allowing them to share information and coordinate their actions more effectively.
-
Simulation-based training: These techniques leverage realistic driving simulation environments to train MARL algorithms in a safe and controlled setting before deploying them in the real world.
The authors also discuss the various benchmarks and simulation environments that have been developed for evaluating MARL algorithms in autonomous driving, such as SUMO, CARLA, and highway-env. These platforms provide realistic driving scenarios, including intersections, highways, and urban settings, to assess the performance of MARL algorithms in complex, dynamic environments.
Throughout the paper, the authors highlight the key challenges and trade-offs associated with each MARL approach, such as the need for efficient credit assignment, scalable coordination mechanisms, and robust exploration strategies. They also discuss promising directions for future research, such as the integration of deep learning techniques, the development of interpretable and verifiable MARL algorithms, and the incorporation of human-in-the-loop feedback for safer and more ethical autonomous driving systems.
Critical Analysis
The survey paper provides a comprehensive and well-organized overview of the current state of MARL research for autonomous driving. The authors have done an excellent job of identifying the key challenges, categorizing the existing approaches, and highlighting the strengths and limitations of each.
One potential limitation of the paper is that it does not delve deeply into the technical details of the various MARL algorithms and their underlying mechanisms. While this is understandable given the broad scope of the survey, some readers may wish for more in-depth technical explanations and comparisons of the different methods.
Additionally, the paper could have discussed the potential ethical and societal implications of deploying MARL-based autonomous driving systems more extensively. Issues such as algorithmic bias, accountability, and the impact on transportation equity are important considerations that warrant further exploration.
Despite these minor critiques, the survey paper is a valuable resource for researchers and practitioners working in the field of autonomous driving. It provides a solid foundation for understanding the current state of MARL research and identifying promising avenues for future work.
Conclusion
This survey paper offers a comprehensive overview of the use of multi-agent reinforcement learning (MARL) techniques for developing advanced autonomous driving systems. By examining the key challenges, existing approaches, and simulation benchmarks in this field, the authors provide a valuable resource for researchers and practitioners working to push the boundaries of what is possible with autonomous vehicles.
The paper highlights how MARL can enable autonomous vehicles to navigate complex, dynamic environments and coordinate their actions with other agents in real-time, addressing crucial challenges such as collision avoidance and traffic optimization. The authors' discussion of distributed decision-making, communication-aware learning, and simulation-based training approaches offers a rich tapestry of MARL techniques that can be leveraged to create safer, more efficient, and more reliable autonomous driving systems.
As the autonomous driving industry continues to evolve, this survey paper serves as an important reference point, documenting the state-of-the-art in MARL research and identifying promising directions for future exploration. By synthesizing the key insights and trends in this rapidly advancing field, the authors have provided a valuable resource for the broader research community to build upon and advance the state of the art in autonomous driving.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-Agent Reinforcement Learning for Autonomous Driving: A Survey
Ruiqi Zhang, Jing Hou, Florian Walter, Shangding Gu, Jiayi Guan, Florian Rohrbein, Yali Du, Panpan Cai, Guang Chen, Alois Knoll
Reinforcement Learning (RL) is a potent tool for sequential decision-making and has achieved performance surpassing human capabilities across many challenging real-world tasks. As the extension of RL in the multi-agent system domain, multi-agent RL (MARL) not only need to learn the control policy but also requires consideration regarding interactions with all other agents in the environment, mutual influences among different system components, and the distribution of computational resources. This augments the complexity of algorithmic design and poses higher requirements on computational resources. Simultaneously, simulators are crucial to obtain realistic data, which is the fundamentals of RL. In this paper, we first propose a series of metrics of simulators and summarize the features of existing benchmarks. Second, to ease comprehension, we recall the foundational knowledge and then synthesize the recently advanced studies of MARL-related autonomous driving and intelligent transportation systems. Specifically, we examine their environmental modeling, state representation, perception units, and algorithm design. Conclusively, we discuss open challenges as well as prospects and opportunities. We hope this paper can help the researchers integrate MARL technologies and trigger more insightful ideas toward the intelligent and autonomous driving.
Read more8/20/2024
0
Multi-agent Reinforcement Learning: A Comprehensive Survey
Dom Huh, Prasant Mohapatra
Multi-agent systems (MAS) are widely prevalent and crucially important in numerous real-world applications, where multiple agents must make decisions to achieve their objectives in a shared environment. Despite their ubiquity, the development of intelligent decision-making agents in MAS poses several open challenges to their effective implementation. This survey examines these challenges, placing an emphasis on studying seminal concepts from game theory (GT) and machine learning (ML) and connecting them to recent advancements in multi-agent reinforcement learning (MARL), i.e. the research of data-driven decision-making within MAS. Therefore, the objective of this survey is to provide a comprehensive perspective along the various dimensions of MARL, shedding light on the unique opportunities that are presented in MARL applications while highlighting the inherent challenges that accompany this potential. Therefore, we hope that our work will not only contribute to the field by analyzing the current landscape of MARL but also motivate future directions with insights for deeper integration of concepts from related domains of GT and ML. With this in mind, this work delves into a detailed exploration of recent and past efforts of MARL and its related fields and describes prior solutions that were proposed and their limitations, as well as their applications.
Read more7/4/2024

0
A Distributed Approach to Autonomous Intersection Management via Multi-Agent Reinforcement Learning
Matteo Cederle, Marco Fabris, Gian Antonio Susto
Autonomous intersection management (AIM) poses significant challenges due to the intricate nature of real-world traffic scenarios and the need for a highly expensive centralised server in charge of simultaneously controlling all the vehicles. This study addresses such issues by proposing a novel distributed approach to AIM utilizing multi-agent reinforcement learning (MARL). We show that by leveraging the 3D surround view technology for advanced assistance systems, autonomous vehicles can accurately navigate intersection scenarios without needing any centralised controller. The contributions of this paper thus include a MARL-based algorithm for the autonomous management of a 4-way intersection and also the introduction of a new strategy called prioritised scenario replay for improved training efficacy. We validate our approach as an innovative alternative to conventional centralised AIM techniques, ensuring the full reproducibility of our results. Specifically, experiments conducted in virtual environments using the SMARTS platform highlight its superiority over benchmarks across various metrics.
Read more5/15/2024
🏅
0
LLM-based Multi-Agent Reinforcement Learning: Current and Future Directions
Chuanneng Sun, Songjun Huang, Dario Pompili
In recent years, Large Language Models (LLMs) have shown great abilities in various tasks, including question answering, arithmetic problem solving, and poem writing, among others. Although research on LLM-as-an-agent has shown that LLM can be applied to Reinforcement Learning (RL) and achieve decent results, the extension of LLM-based RL to Multi-Agent System (MAS) is not trivial, as many aspects, such as coordination and communication between agents, are not considered in the RL frameworks of a single agent. To inspire more research on LLM-based MARL, in this letter, we survey the existing LLM-based single-agent and multi-agent RL frameworks and provide potential research directions for future research. In particular, we focus on the cooperative tasks of multiple agents with a common goal and communication among them. We also consider human-in/on-the-loop scenarios enabled by the language component in the framework.
Read more5/21/2024