Autonomous Algorithm for Training Autonomous Vehicles with Minimal Human Intervention

0
🔍
Sign in to get full access
Overview
- Reinforcement learning (RL) offers a promising approach for enabling autonomous vehicles to continuously learn and improve their driving behaviors on their own.
- However, training real-world autonomous vehicles with current RL algorithms faces significant challenges, particularly the need to reset the driving environment between each training episode.
- The paper introduces a novel algorithm that allows off-the-shelf RL algorithms to train autonomous vehicles with minimal human intervention.
- The algorithm determines when to abort episodes before the vehicle enters unsafe states and where to reset it for subsequent episodes to gather informative training data.
- The algorithm leverages the vehicle's learning progress, estimated based on the novelty of current and future states, as well as rule-based autonomous driving algorithms to safely reset the vehicle.
- Experiments show the algorithm is task-agnostic and achieves better driving performance with fewer manual resets compared to baseline approaches.
Plain English Explanation
Reinforcement learning (RL) is a powerful technique that could enable autonomous vehicles to continuously learn and improve their driving behaviors on their own. RL-based Autonomous Vehicle Decision and Control and Context Learning for Automated Driving Scenarios are examples of research exploring this approach.
However, training real-world autonomous vehicles using current RL algorithms presents some significant challenges. One key issue is the need to "reset" the driving environment between each training episode. While this is easy to do in simulated environments, it requires significant human intervention in the real world, which is not practical.
To address this challenge, the researchers developed a novel algorithm that allows off-the-shelf RL algorithms to train autonomous vehicles with minimal human intervention. The algorithm monitors the vehicle's learning progress, based on the novelty of its current and future states, to determine when to safely abort an episode before the vehicle enters unsafe situations. It then uses rule-based autonomous driving algorithms to reset the vehicle to a suitable starting position for the next training episode.
This smart episode management approach allows the vehicle to gather more informative training data, leading to better driving performance with fewer manual resets compared to baseline methods. The researchers evaluated their algorithm on diverse urban driving tasks and found it to be task-agnostic, meaning it can be applied to a wide range of driving scenarios.
Technical Explanation
The paper introduces a novel algorithm that enables off-the-shelf reinforcement learning (RL) algorithms to train autonomous vehicles in the real world with minimal human intervention. The key innovation is the algorithm's ability to intelligently manage the training episodes to gather the most informative data for the RL agent.
Specifically, the algorithm monitors the learning progress of the autonomous vehicle, estimated based on the novelty of both its current and future states. When the algorithm determines that the vehicle is about to enter an unsafe state, it will abort the current episode. It then uses rule-based autonomous driving algorithms to safely reset the vehicle to an initial state that is likely to provide useful training data for the next episode.
This approach addresses a critical challenge often overlooked in applying RL to real-world autonomous driving: the need to reset the driving environment between each training episode. While resetting the environment is trivial in simulation, it requires significant human intervention in the real world, which is not scalable.
The researchers evaluated their algorithm on diverse urban driving tasks and compared it to baseline approaches. The results show that their algorithm is task-agnostic and achieves better driving performance with fewer manual resets than the baselines. This suggests that their intelligent episode management strategy is an effective way to apply RL to real-world autonomous vehicle training.
Critical Analysis
The paper presents a novel and promising approach to applying reinforcement learning (RL) to real-world autonomous vehicle training. By intelligently managing the training episodes to avoid unsafe states and gather informative data, the researchers have addressed a key challenge that has limited the practical application of RL in this domain.
However, the paper does acknowledge several limitations and areas for further research. For example, the algorithm relies on rule-based autonomous driving algorithms to safely reset the vehicle, which may not be applicable in all driving scenarios. Trajectory Planning for Autonomous Vehicles Using Iterative Reward and Reinforcement Learning-based Oscillation Dampening for Scaling Up explore alternative approaches to trajectory planning and control that could potentially be integrated with the episode management algorithm.
Additionally, the paper does not address the potential challenges of human-machine interaction in automated vehicles and how the episode management algorithm might need to be adapted to handle situations where the human driver needs to intervene. Incorporating human factors into the algorithm design could be an important area for future research.
Overall, the paper presents a valuable contribution to the field of autonomous vehicle control, demonstrating the potential of reinforcement learning with thoughtful algorithm design to address real-world challenges. However, further research is needed to fully realize the practical benefits of this approach in complex, dynamic driving environments.
Conclusion
This paper introduces a novel algorithm that enables off-the-shelf reinforcement learning (RL) algorithms to train autonomous vehicles in the real world with minimal human intervention. The key innovation is the algorithm's ability to intelligently manage the training episodes, aborting them before the vehicle enters unsafe states and resetting it to gather more informative data.
By leveraging the vehicle's learning progress and rule-based autonomous driving algorithms, the proposed approach addresses a critical challenge in applying RL to real-world autonomous driving: the need to reset the driving environment between episodes. The experimental results show the algorithm is task-agnostic and achieves better driving performance with fewer manual resets compared to baseline methods.
While the paper acknowledges several limitations and areas for further research, the proposed algorithm represents a significant step forward in making RL a more practical and effective technique for autonomous vehicle control. As the field of autonomous driving continues to evolve, this type of innovative algorithm design will be crucial for enabling vehicles to learn and adapt to diverse, real-world driving scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔍
0
Autonomous Algorithm for Training Autonomous Vehicles with Minimal Human Intervention
Sang-Hyun Lee, Daehyeok Kwon, Seung-Woo Seo
Reinforcement learning (RL) provides a compelling framework for enabling autonomous vehicles to continue to learn and improve diverse driving behaviors on their own. However, training real-world autonomous vehicles with current RL algorithms presents several challenges. One critical challenge, often overlooked in these algorithms, is the need to reset a driving environment between every episode. While resetting an environment after each episode is trivial in simulated settings, it demands significant human intervention in the real world. In this paper, we introduce a novel autonomous algorithm that allows off-the-shelf RL algorithms to train an autonomous vehicle with minimal human intervention. Our algorithm takes into account the learning progress of the autonomous vehicle to determine when to abort episodes before it enters unsafe states and where to reset it for subsequent episodes in order to gather informative transitions. The learning progress is estimated based on the novelty of both current and future states. We also take advantage of rule-based autonomous driving algorithms to safely reset an autonomous vehicle to an initial state. We evaluate our algorithm against baselines on diverse urban driving tasks. The experimental results show that our algorithm is task-agnostic and achieves better driving performance with fewer manual resets than baselines.
Read more5/24/2024
0
A Safe and Efficient Self-evolving Algorithm for Decision-making and Control of Autonomous Driving Systems
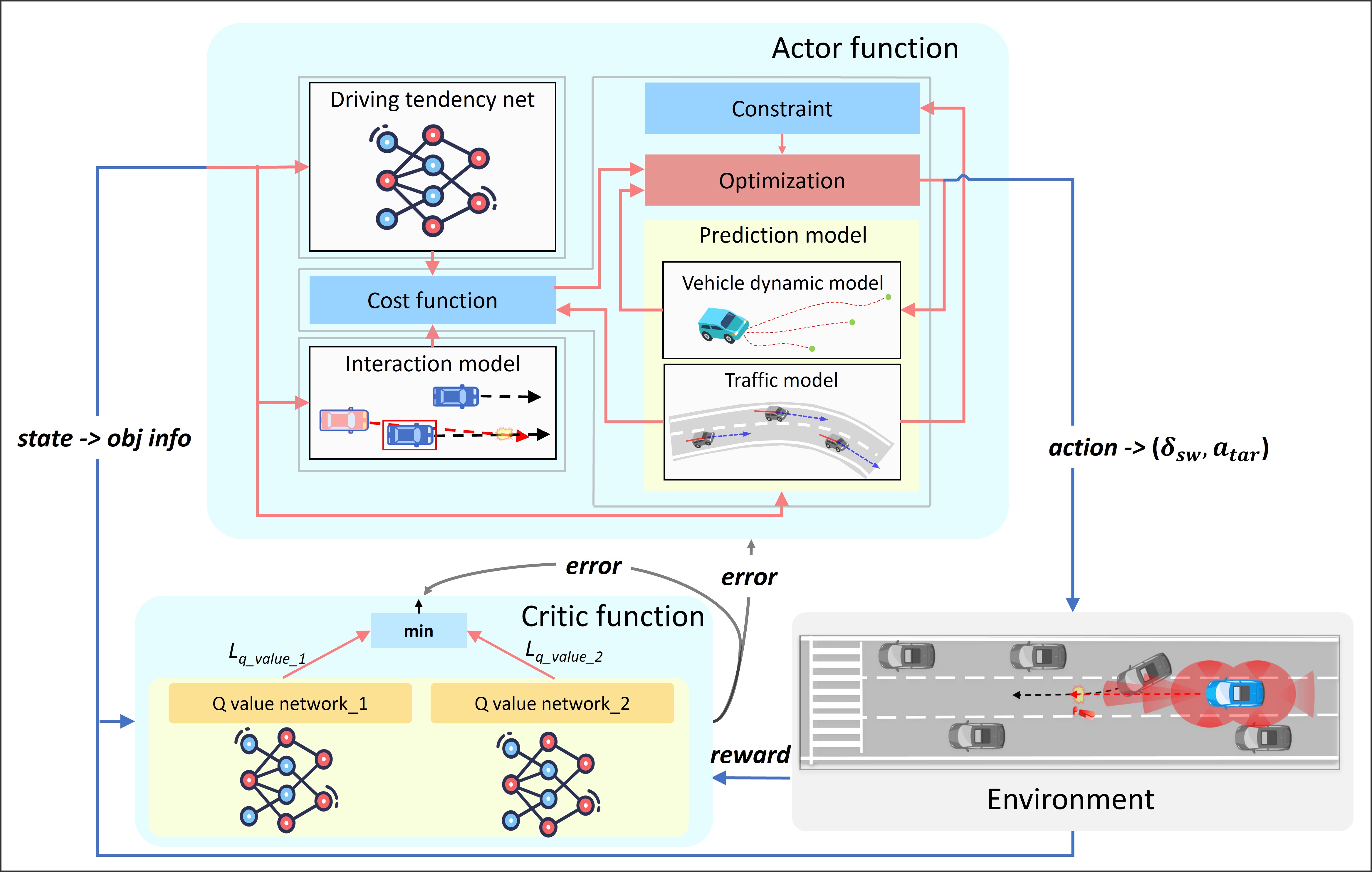
Shuo Yang, Liwen Wang, Yanjun Huang, Hong Chen
Autonomous vehicles with a self-evolving ability are expected to cope with unknown scenarios in the real-world environment. Take advantage of trial and error mechanism, reinforcement learning is able to self evolve by learning the optimal policy, and it is particularly well suitable for solving decision-making problems. However, reinforcement learning suffers from safety issues and low learning efficiency, especially in the continuous action space. Therefore, the motivation of this paper is to address the above problem by proposing a hybrid Mechanism-Experience-Learning augmented approach. Specifically, to realize the efficient self-evolution, the driving tendency by analogy with human driving experience is proposed to reduce the search space of the autonomous driving problem, while the constrained optimization problem based on a mechanistic model is designed to ensure safety during the self-evolving process. Experimental results show that the proposed method is capable of generating safe and reasonable actions in various complex scenarios, improving the performance of the autonomous driving system. Compared to conventional reinforcement learning, the safety and efficiency of the proposed algorithm are greatly improved. The training process is collision-free, and the training time is equivalent to less than 10 minutes in the real world.
Read more8/23/2024

0
Multi-Agent Reinforcement Learning for Autonomous Driving: A Survey
Ruiqi Zhang, Jing Hou, Florian Walter, Shangding Gu, Jiayi Guan, Florian Rohrbein, Yali Du, Panpan Cai, Guang Chen, Alois Knoll
Reinforcement Learning (RL) is a potent tool for sequential decision-making and has achieved performance surpassing human capabilities across many challenging real-world tasks. As the extension of RL in the multi-agent system domain, multi-agent RL (MARL) not only need to learn the control policy but also requires consideration regarding interactions with all other agents in the environment, mutual influences among different system components, and the distribution of computational resources. This augments the complexity of algorithmic design and poses higher requirements on computational resources. Simultaneously, simulators are crucial to obtain realistic data, which is the fundamentals of RL. In this paper, we first propose a series of metrics of simulators and summarize the features of existing benchmarks. Second, to ease comprehension, we recall the foundational knowledge and then synthesize the recently advanced studies of MARL-related autonomous driving and intelligent transportation systems. Specifically, we examine their environmental modeling, state representation, perception units, and algorithm design. Conclusively, we discuss open challenges as well as prospects and opportunities. We hope this paper can help the researchers integrate MARL technologies and trigger more insightful ideas toward the intelligent and autonomous driving.
Read more8/20/2024

0
Optimizing Autonomous Driving for Safety: A Human-Centric Approach with LLM-Enhanced RLHF
Yuan Sun, Navid Salami Pargoo, Peter J. Jin, Jorge Ortiz
Reinforcement Learning from Human Feedback (RLHF) is popular in large language models (LLMs), whereas traditional Reinforcement Learning (RL) often falls short. Current autonomous driving methods typically utilize either human feedback in machine learning, including RL, or LLMs. Most feedback guides the car agent's learning process (e.g., controlling the car). RLHF is usually applied in the fine-tuning step, requiring direct human preferences, which are not commonly used in optimizing autonomous driving models. In this research, we innovatively combine RLHF and LLMs to enhance autonomous driving safety. Training a model with human guidance from scratch is inefficient. Our framework starts with a pre-trained autonomous car agent model and implements multiple human-controlled agents, such as cars and pedestrians, to simulate real-life road environments. The autonomous car model is not directly controlled by humans. We integrate both physical and physiological feedback to fine-tune the model, optimizing this process using LLMs. This multi-agent interactive environment ensures safe, realistic interactions before real-world application. Finally, we will validate our model using data gathered from real-life testbeds located in New Jersey and New York City.
Read more6/10/2024