Multi-contact Stochastic Predictive Control for Legged Robots with Contact Locations Uncertainty
2309.04469
0
0
❗
Abstract
Trajectory optimization under uncertainties is a challenging problem for robots in contact with the environment. Such uncertainties are inevitable due to estimation errors, control imperfections, and model mismatches between planning models used for control and the real robot dynamics. This induces control policies that could violate the contact location constraints by making contact at unintended locations, and as a consequence leading to unsafe motion plans. This work addresses the problem of robust kino-dynamic whole-body trajectory optimization using stochastic nonlinear model predictive control (SNMPC) by considering additive uncertainties on the model dynamics subject to contact location chance-constraints as a function of robot's full kinematics. We demonstrate the benefit of using SNMPC over classic nonlinear MPC (NMPC) for whole-body trajectory optimization in terms of contact location constraint satisfaction (safety). We run extensive Monte-Carlo simulations for a quadruped robot performing agile trotting and bounding motions over small stepping stones, where contact location satisfaction becomes critical. Our results show that SNMPC is able to perform all motions safely with 100% success rate, while NMPC failed 48.3% of all motions.
Create account to get full access
Overview
- This paper addresses the problem of robust kino-dynamic whole-body trajectory optimization under uncertainties for robots in contact with the environment.
- Uncertainties in robot dynamics, such as estimation errors, control imperfections, and model mismatches, can lead to contact location constraints being violated, resulting in unsafe motion plans.
- The researchers use stochastic nonlinear model predictive control (SNMPC) to consider additive uncertainties on the model dynamics and enforce contact location chance-constraints based on the robot's full kinematics.
Plain English Explanation
The paper discusses a challenge that robots face when moving around and interacting with their environment. When robots make contact with the world, there are always some uncertainties involved, such as errors in measuring the robot's position, imperfections in the robot's controls, and differences between the model of the robot used for planning and the actual robot.
These uncertainties can cause the robot to make contact at unintended locations, leading to unsafe motion plans. To address this, the researchers use a technique called stochastic nonlinear model predictive control (SNMPC). This allows them to take into account the uncertainties in the robot's dynamics and ensure that the robot only makes contact at the intended locations, satisfying contact location constraints.
The researchers test this approach on a quadruped robot performing agile trotting and bounding motions over small stepping stones, where precise control of the contact locations is critical. They find that the SNMPC approach is able to safely execute all the motions, while a more traditional approach fails nearly half the time.
Technical Explanation
The researchers use stochastic nonlinear model predictive control (SNMPC) to address the problem of robust kino-dynamic whole-body trajectory optimization under uncertainties for robots in contact with the environment. They consider additive uncertainties on the model dynamics and enforce contact location chance-constraints as a function of the robot's full kinematics.
In their experiments, the researchers evaluate the SNMPC approach on a quadruped robot performing agile trotting and bounding motions over small stepping stones. This scenario is chosen because precise control of the contact locations is critical for safe multi-contact whole-body force control and positioning.
The results show that the SNMPC approach is able to satisfy the contact location constraints and execute all the motions safely with a 100% success rate. In contrast, a more traditional nonlinear MPC (NMPC) approach failed 48.3% of the time, demonstrating the benefits of considering uncertainties in the simultaneous state estimation and contact detection for whole-body trajectory optimization.
Critical Analysis
The paper provides a thorough evaluation of the SNMPC approach and demonstrates its advantages over the NMPC approach in terms of contact location constraint satisfaction. However, the researchers do not discuss any potential limitations or caveats of their method.
One area for further research could be investigating the scalability of the SNMPC approach to more complex robot systems or environments with a larger number of contacts. Additionally, the researchers could explore the trade-offs between the computational complexity of the SNMPC approach and the level of safety guarantees it provides.
Overall, the research presents a valuable contribution to the field of robust trajectory optimization for robots in contact with the environment, but there may be opportunities to further refine and expand the approach.
Conclusion
This paper addresses the critical problem of robust kino-dynamic whole-body trajectory optimization under uncertainties for robots in contact with the environment. By using stochastic nonlinear model predictive control (SNMPC) to consider additive uncertainties on the model dynamics and enforce contact location chance-constraints, the researchers demonstrate a significant improvement in the safety of motion plans compared to a more traditional nonlinear MPC approach.
The findings have important implications for the development of robust and reliable robotic systems that must navigate and interact with complex real-world environments. The SNMPC approach could be particularly useful for legged robots, dexterous manipulators, and other systems where precise control of contact locations is essential for safe and effective operation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
ContactNet: Online Multi-Contact Planning for Acyclic Legged Robot Locomotion
Angelo Bratta, Avadesh Meduri, Michele Focchi, Ludovic Righetti, Claudio Semini
0
0
In legged logomotion, online trajectory optimization techniques generally depend on heuristic-based contact planners in order to have low computation times and achieve high replanning frequencies. In this work, we propose ContactNet, a fast acyclic contact planner based on a multi-output regression neural network. ContactNet ranks discretized stepping regions, allowing to quickly choose the best feasible solution, even in complex environments. The low computation time, in the order of 1 ms, makes possible the execution of the contact planner concurrently with a trajectory optimizer in a Model Predictive Control (MPC) fashion. We demonstrate the effectiveness of the approach in simulation in different complex scenarios with the quadruped robot Solo12.
5/3/2024
CC-VPSTO: Chance-Constrained Via-Point-based Stochastic Trajectory Optimisation for Safe and Efficient Online Robot Motion Planning
Lara Brudermuller, Guillaume Berger, Julius Jankowski, Raunak Bhattacharyya, Raphael Jungers, Nick Hawes
0
0
Safety in the face of uncertainty is a key challenge in robotics. We introduce a real-time capable framework to generate safe and task-efficient robot motions for stochastic control problems. We frame this as a chance-constrained optimisation problem constraining the probability of the controlled system to violate a safety constraint to be below a set threshold. To estimate this probability we propose a Monte--Carlo approximation. We suggest several ways to construct the problem given a fixed number of uncertainty samples, such that it is a reliable over-approximation of the original problem, i.e. any solution to the sample-based problem adheres to the original chance-constraint with high confidence. To solve the resulting problem, we integrate it into our motion planner VP-STO and name the enhanced framework Chance-Constrained (CC)-VPSTO. The strengths of our approach lie in i) its generality, without assumptions on the underlying uncertainty distribution, system dynamics, cost function, or the form of inequality constraints; and ii) its applicability to MPC-settings. We demonstrate the validity and efficiency of our approach on both simulation and real-world robot experiments.
4/10/2024

Path Planning and Motion Control for Accurate Positioning of Car-like Robots
Jin Dai, Zejiang Wang, Yebin Wang, Rien Quirynen, Stefano Di Cairano
0
0
This paper investigates the planning and control for accurate positioning of car-like robots. We propose a solution that integrates two modules: a motion planner, facilitated by the rapidly-exploring random tree algorithm and continuous-curvature (CC) steering technique, generates a CC trajectory as a reference; and a nonlinear model predictive controller (NMPC) regulates the robot to accurately track the reference trajectory. Based on the $mu$-tangency conditions in prior art, we derive explicit existence conditions and develop associated computation methods for a special class of CC paths which not only admit the same driving patterns as Reeds-Shepp paths but also consist of cusp-free clothoid turns. Afterwards, we create an autonomous vehicle parking scenario where the NMPC endeavors to follow the reference trajectory. Feasibility and computational efficiency of the CC steering are validated by numerical simulation. CarSim-Simulink joint simulations statistically verify that with exactly same NMPC, the closed-loop system with CC trajectories as references substantially outperforms the case where Reeds-Shepp trajectories are used as references.
6/11/2024
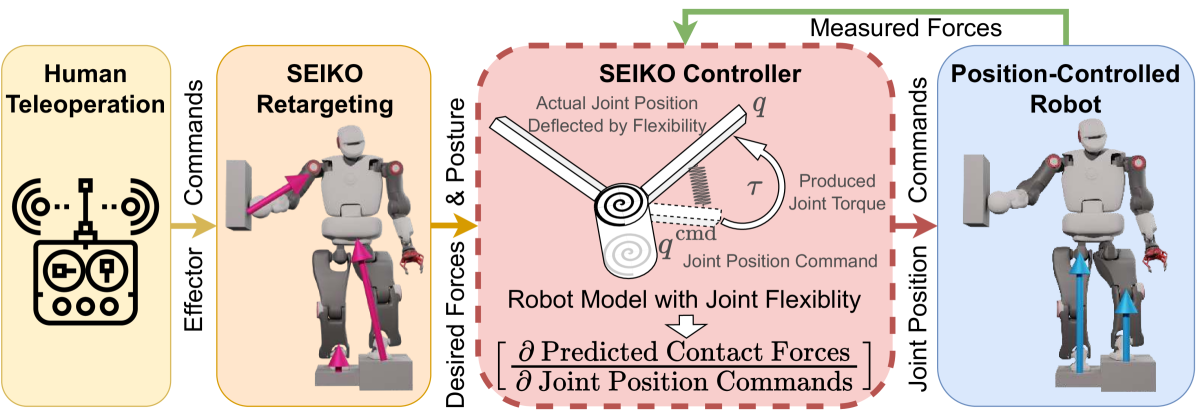
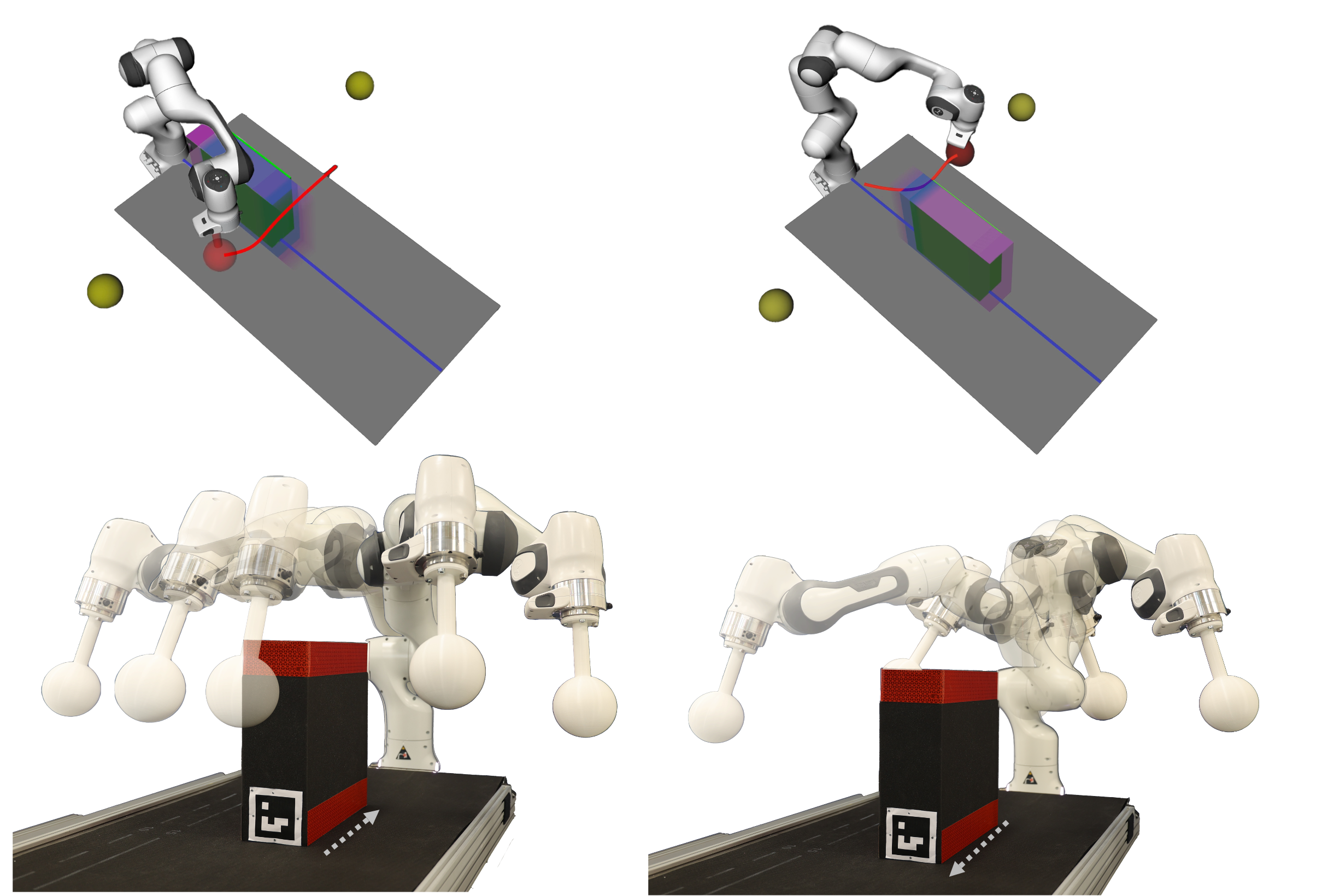
Multi-Contact Whole-Body Force Control for Position-Controlled Robots
Quentin Rouxel (LARSEN), Serena Ivaldi (LARSEN), Jean-Baptiste Mouret (LARSEN)
0
0
Many humanoid and multi-legged robots are controlled in positions rather than in torques, which prevents direct control of contact forces, and hampers their ability to create multiple contacts to enhance their balance, such as placing a hand on a wall or a handrail. This letter introduces the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) pipeline, and proposes a unified formulation that exploits an explicit model of flexibility to indirectly control contact forces on traditional position-controlled robots. SEIKO formulates whole-body retargeting from Cartesian commands and admittance control using two quadratic programs solved in real-time. Our pipeline is validated with experiments on the real, full-scale humanoid robot Talos in various multi-contact scenarios, including pushing tasks, far-reaching tasks, stair climbing, and stepping on sloped surfaces. Code and videos are available at: https://hucebot.github.io/seiko_controller_website/
5/24/2024