ContactNet: Online Multi-Contact Planning for Acyclic Legged Robot Locomotion

0
🤿
Sign in to get full access
Overview
- The paper proposes a fast acyclic contact planner called ContactNet, based on a multi-output regression neural network.
- ContactNet ranks discretized stepping regions, allowing for quick selection of the best feasible solution, even in complex environments.
- The low computation time, around 1 millisecond, enables concurrent execution of the contact planner with a trajectory optimizer in a Model Predictive Control (MPC) fashion.
- The effectiveness of the approach is demonstrated in simulation with the quadruped robot Solo12 in different complex scenarios.
Plain English Explanation
When it comes to legged robots, such as quadrupeds, planning the movement of their legs is a critical task. Hierarchical Experience-Informed Navigation for Multi-Modal Quadrupedal Locomotion and Non-Impulsive Contact-Implicit Motion Planning for Morphological Adaptation have explored different approaches to this problem.
The current paper focuses on a specific technique called "online trajectory optimization," which relies on quick decision-making about where the robot's feet should step. This decision-making process is typically done by a "contact planner," which needs to be fast and efficient to keep up with the robot's movements.
The researchers developed a new contact planner called "ContactNet" that uses a neural network to quickly evaluate and rank possible stepping locations, even in complex environments. This allows the robot to quickly choose the best option and keep moving smoothly. The neural network-based approach is much faster than traditional methods, taking only about 1 millisecond to run.
This speed enables the contact planner to work together with a "trajectory optimizer," which plans the overall robot movement, in a way that allows the robot to continuously adapt its movements in real-time, similar to Simultaneous State Estimation and Contact Detection for Legged Robots and Learning Quadrupedal Locomotion via Differentiable Simulation. This real-time adaptation is crucial for navigating complex environments.
Technical Explanation
The paper presents ContactNet, a fast acyclic contact planner based on a multi-output regression neural network. The key idea is to have the neural network quickly rank discretized stepping regions, allowing for the rapid selection of the best feasible solution, even in complex environments.
The low computation time of ContactNet, around 1 millisecond, enables its concurrent execution with a trajectory optimizer in a Model Predictive Control (MPC) fashion. This allows for continuous real-time adaptation of the robot's movements, as opposed to the traditional approach of using heuristic-based contact planners that have higher computation times and can't keep up with the replanning frequency required for legged locomotion.
The researchers demonstrate the effectiveness of their approach through simulation experiments with the quadruped robot Solo12 in various complex scenarios. The results show that ContactNet can successfully navigate the robot through these environments by quickly selecting appropriate stepping locations.
Critical Analysis
The paper presents a novel and promising approach to contact planning for legged robots, addressing the key challenge of achieving low computation times while maintaining high replanning frequencies. The use of a neural network-based planner is an interesting solution, as it allows for rapid evaluation of potential stepping regions.
One potential limitation mentioned in the paper is the need for extensive training data to ensure the neural network performs well across a wide range of scenarios. The researchers note that this could be addressed through Learning Force Control for Legged Manipulation, where the neural network is trained on a diverse set of simulated and real-world data.
Additionally, the paper focuses on simulation experiments, and it would be important to see how the ContactNet planner performs in real-world settings, where factors like sensor noise, uneven terrain, and unexpected disturbances may introduce additional challenges.
Overall, the research presented in this paper represents a significant advancement in the field of legged locomotion, and the authors have demonstrated the potential of their approach through thorough experimentation and analysis.
Conclusion
The ContactNet contact planner proposed in this paper offers a promising solution for enabling fast and efficient legged locomotion in complex environments. By leveraging a neural network to quickly evaluate and rank potential stepping locations, the system can operate concurrently with a trajectory optimizer, allowing for continuous real-time adaptation of the robot's movements.
The researchers have demonstrated the effectiveness of their approach through simulation experiments, and the low computation time of the ContactNet planner suggests that it could be a valuable tool for a wide range of legged robotics applications. As the field of legged locomotion continues to advance, techniques like this that can improve the speed and adaptability of robot movements will be crucial for unlocking new capabilities and applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
0
ContactNet: Online Multi-Contact Planning for Acyclic Legged Robot Locomotion
Angelo Bratta, Avadesh Meduri, Michele Focchi, Ludovic Righetti, Claudio Semini
In legged logomotion, online trajectory optimization techniques generally depend on heuristic-based contact planners in order to have low computation times and achieve high replanning frequencies. In this work, we propose ContactNet, a fast acyclic contact planner based on a multi-output regression neural network. ContactNet ranks discretized stepping regions, allowing to quickly choose the best feasible solution, even in complex environments. The low computation time, in the order of 1 ms, makes possible the execution of the contact planner concurrently with a trajectory optimizer in a Model Predictive Control (MPC) fashion. We demonstrate the effectiveness of the approach in simulation in different complex scenarios with the quadruped robot Solo12.
Read more5/3/2024

0
Learning feasible transitions for efficient contact planning
Rikhat Akizhanov, Victor Dh'edin, Majid Khadiv, Ivan Laptev
Contact planning for legged robots in extremely constrained environments is challenging. The main difficulty stems from the mixed nature of the problem, discrete search together with continuous trajectory optimization. To speed up the discrete search problem, we propose in this paper to learn the properties of transitions from one contact mode to the next. In particular, we learn a feasibility classifier and an offset network; the former predicts if a potential next contact state is feasible from the current contact state, while the latter learns to compensate for misalignment in achieving a desired contact state due to imperfections of the low-level control. We integrate these learned networks in a Monte Carlo Tree Search (MCTS) contact planner to better prune the tree and improve the heuristic. Our simulation results demonstrate that training these networks with offline data significantly speeds up the online search process and improves its accuracy.
Read more7/17/2024
0
Diffusion-based learning of contact plans for agile locomotion
Victor Dh'edin, Adithya Kumar Chinnakkonda Ravi, Armand Jordana, Huaijiang Zhu, Avadesh Meduri, Ludovic Righetti, Bernhard Scholkopf, Majid Khadiv
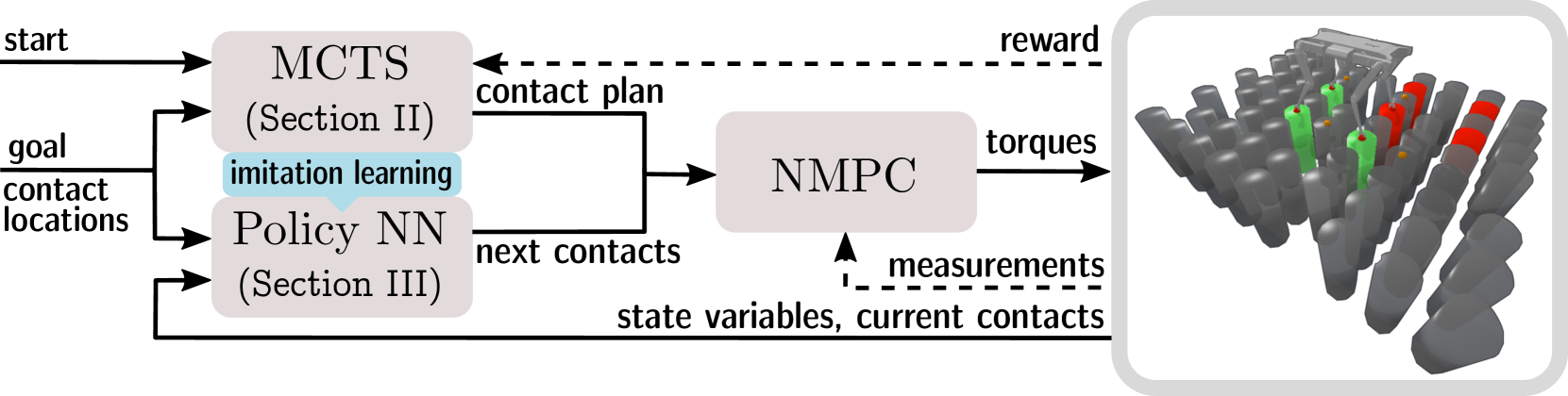
Legged robots have become capable of performing highly dynamic maneuvers in the past few years. However, agile locomotion in highly constrained environments such as stepping stones is still a challenge. In this paper, we propose a combination of model-based control, search, and learning to design efficient control policies for agile locomotion on stepping stones. In our framework, we use nonlinear model predictive control (NMPC) to generate whole-body motions for a given contact plan. To efficiently search for an optimal contact plan, we propose to use Monte Carlo tree search (MCTS). While the combination of MCTS and NMPC can quickly find a feasible plan for a given environment (a few seconds), it is not yet suitable to be used as a reactive policy. Hence, we generate a dataset for optimal goal-conditioned policy for a given scene and learn it through supervised learning. In particular, we leverage the power of diffusion models in handling multi-modality in the dataset. We test our proposed framework on a scenario where our quadruped robot Solo12 successfully jumps to different goals in a highly constrained environment.
Read more7/17/2024
❗
0
Multi-contact Stochastic Predictive Control for Legged Robots with Contact Locations Uncertainty
Ahmad Gazar, Majid Khadiv, Andrea Del Prete, Ludovic Righetti
Trajectory optimization under uncertainties is a challenging problem for robots in contact with the environment. Such uncertainties are inevitable due to estimation errors, control imperfections, and model mismatches between planning models used for control and the real robot dynamics. This induces control policies that could violate the contact location constraints by making contact at unintended locations, and as a consequence leading to unsafe motion plans. This work addresses the problem of robust kino-dynamic whole-body trajectory optimization using stochastic nonlinear model predictive control (SNMPC) by considering additive uncertainties on the model dynamics subject to contact location chance-constraints as a function of robot's full kinematics. We demonstrate the benefit of using SNMPC over classic nonlinear MPC (NMPC) for whole-body trajectory optimization in terms of contact location constraint satisfaction (safety). We run extensive Monte-Carlo simulations for a quadruped robot performing agile trotting and bounding motions over small stepping stones, where contact location satisfaction becomes critical. Our results show that SNMPC is able to perform all motions safely with 100% success rate, while NMPC failed 48.3% of all motions.
Read more6/14/2024