A Multi-Modal Approach Based on Large Vision Model for Close-Range Underwater Target Localization

0
👀
Sign in to get full access
Overview
- Underwater target localization uses real-time sensor measurements to estimate the position of underwater objects
- Acoustic sensing is commonly used, but has limitations like low resolution, high cost, and high energy consumption
- Optical sensing can offer higher resolution and lower cost, but is often restricted to specific target types
- This paper proposes a novel method that combines optical and acoustic sensors to localize close-range underwater targets
Plain English Explanation
Underwater robots often need to know the exact location of objects in the water, such as other vehicles or obstacles. Acoustic sensing is a common way to do this, using sound waves to detect and track underwater targets. However, acoustic sensing has some drawbacks - the information it provides is often low-quality, it can be expensive, and it uses a lot of power.
On the other hand, using cameras and optical sensors can give much higher-quality information about the location of nearby objects. But most existing optical sensing systems are only able to work with certain types of targets, because they require a lot of training data to recognize different objects.
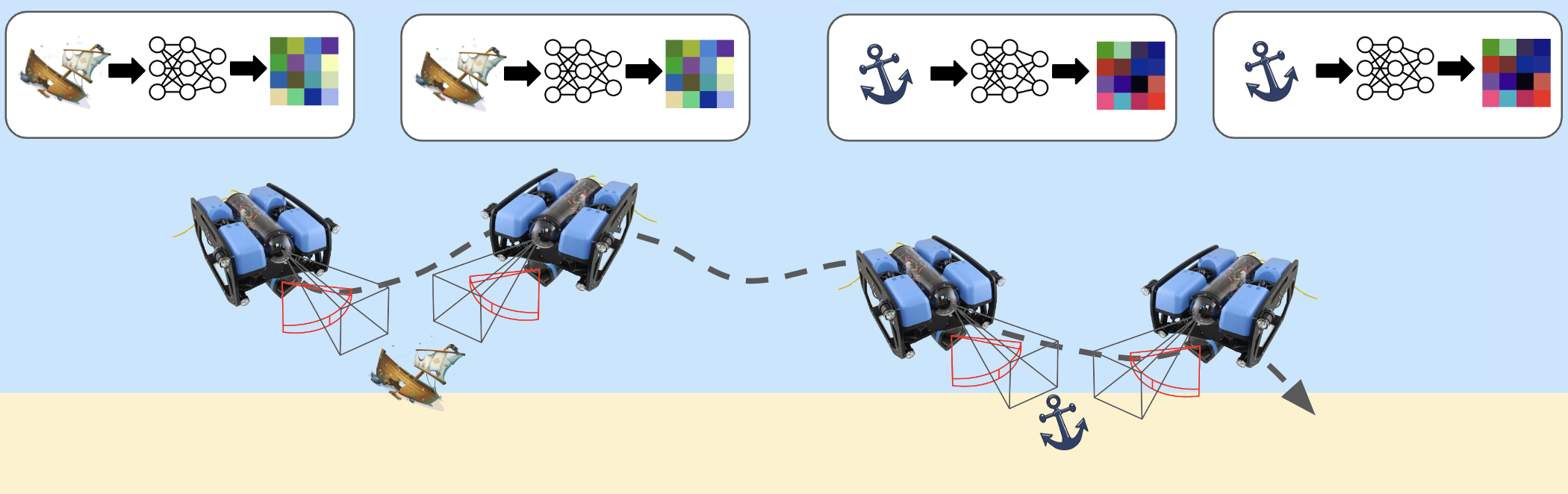
This paper introduces a new method that combines both acoustic and optical sensing to get the benefits of both approaches. The researchers built a test platform with adjustable lighting conditions to experiment with this multi-modal sensing approach. They also used a large machine learning model to process the optical images, which eliminates the need for lots of training data. This allows the system to detect a wider variety of underwater targets.
Technical Explanation
The proposed approach uses both acoustic and optical sensing to estimate the 3D positions of close-range underwater targets. A custom test platform was designed and built to experimentally investigate this multi-modal sensing strategy under different illumination conditions.
To process the optical imaging data, the researchers applied a large vision model. This eliminates the need to acquire extensive training data for specific target types, significantly expanding the scope of potential applications compared to prior work. The acoustic and optical measurements are then assimilated to jointly estimate the target locations.
Extensive experiments were conducted, and the results validate the effectiveness of the proposed underwater target localization method. The combination of optical and acoustic sensing outperforms using either modality alone, providing higher-quality target position estimates.
Critical Analysis
The paper addresses important limitations of existing underwater target localization approaches. By combining optical and acoustic sensing, the proposed method can achieve better performance than relying on a single sensing modality. The use of a large vision model to process the optical data is also a clever way to avoid the need for extensive training datasets, a common bottleneck in prior work.
However, the paper does not provide much detail on the specific algorithms or models used for data fusion and target estimation. It also lacks a thorough analysis of the system's limitations and potential failure modes. Further research would be needed to better understand the robustness and reliability of the approach in real-world underwater environments with challenging conditions like turbidity, debris, and dynamic target movements.
Additionally, the energy consumption and cost implications of the multi-modal sensing setup are not discussed. These practical factors would be important considerations for deploying such a system on autonomous underwater vehicles or other resource-constrained platforms.
Conclusion
This paper presents a novel approach to underwater target localization that leverages both optical and acoustic sensing. By combining these complementary modalities and using a large vision model to process the optical data, the system can achieve higher-quality target position estimates than prior work.
The experimental results demonstrate the potential of this multi-modal sensing strategy for close-range underwater applications, such as obstacle avoidance and navigation for autonomous underwater robots. Further research is needed to fully characterize the system's capabilities and limitations, but this work represents an important step forward in enhancing the sensing and perception capabilities of underwater robotic platforms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👀
0
A Multi-Modal Approach Based on Large Vision Model for Close-Range Underwater Target Localization
Mingyang Yang, Zeyu Sha, Feitian Zhang
Underwater target localization uses real-time sensory measurements to estimate the position of underwater objects of interest, providing critical feedback information for underwater robots. While acoustic sensing is the most acknowledged method in underwater robots and possibly the only effective approach for long-range underwater target localization, such a sensing modality generally suffers from low resolution, high cost and high energy consumption, thus leading to a mediocre performance when applied to close-range underwater target localization. On the other hand, optical sensing has attracted increasing attention in the underwater robotics community for its advantages of high resolution and low cost, holding a great potential particularly in close-range underwater target localization. However, most existing studies in underwater optical sensing are restricted to specific types of targets due to the limited training data available. In addition, these studies typically focus on the design of estimation algorithms and ignore the influence of illumination conditions on the sensing performance, thus hindering wider applications in the real world. To address the aforementioned issues, this paper proposes a novel target localization method that assimilates both optical and acoustic sensory measurements to estimate the 3D positions of close-range underwater targets. A test platform with controllable illumination conditions is designed and developed to experimentally investigate the proposed multi-modal sensing approach. A large vision model is applied to process the optical imaging measurements, eliminating the requirement for training data acquisition, thus significantly expanding the scope of potential applications. Extensive experiments are conducted, the results of which validate the effectiveness of the proposed underwater target localization method.
Read more9/10/2024
🤿
0
A Sonar-based AUV Positioning System for Underwater Environments with Low Infrastructure Density
Emilio Olivastri, Daniel Fusaro, Wanmeng Li, Simone Mosco, Alberto Pretto
The increasing demand for underwater vehicles highlights the necessity for robust localization solutions in inspection missions. In this work, we present a novel real-time sonar-based underwater global positioning algorithm for AUVs (Autonomous Underwater Vehicles) designed for environments with a sparse distribution of human-made assets. Our approach exploits two synergistic data interpretation frontends applied to the same stream of sonar data acquired by a multibeam Forward-Looking Sonar (FSD). These observations are fused within a Particle Filter (PF) either to weigh more particles that belong to high-likelihood regions or to solve symmetric ambiguities. Preliminary experiments carried out on a simulated environment resembling a real underwater plant provided promising results. This work represents a starting point towards future developments of the method and consequent exhaustive evaluations also in real-world scenarios.
Read more5/6/2024
0
New!Opti-Acoustic Semantic SLAM with Unknown Objects in Underwater Environments
Kurran Singh, Jungseok Hong, Nicholas R. Rypkema, John J. Leonard
Despite recent advances in semantic Simultaneous Localization and Mapping (SLAM) for terrestrial and aerial applications, underwater semantic SLAM remains an open and largely unaddressed research problem due to the unique sensing modalities and the object classes found underwater. This paper presents an object-based semantic SLAM method for underwater environments that can identify, localize, classify, and map a wide variety of marine objects without a priori knowledge of the object classes present in the scene. The method performs unsupervised object segmentation and object-level feature aggregation, and then uses opti-acoustic sensor fusion for object localization. Probabilistic data association is used to determine observation to landmark correspondences. Given such correspondences, the method then jointly optimizes landmark and vehicle position estimates. Indoor and outdoor underwater datasets with a wide variety of objects and challenging acoustic and lighting conditions are collected for evaluation and made publicly available. Quantitative and qualitative results show the proposed method achieves reduced trajectory error compared to baseline methods, and is able to obtain comparable map accuracy to a baseline closed-set method that requires hand-labeled data of all objects in the scene.
Read more9/19/2024
0
Mesh-based Photorealistic and Real-time 3D Mapping for Robust Visual Perception of Autonomous Underwater Vehicle
Jungwoo Lee, Younggun Cho
This paper proposes a photorealistic real-time dense 3D mapping system that utilizes a learning-based image enhancement method and mesh-based map representation. Due to the characteristics of the underwater environment, where problems such as hazing and low contrast occur, it is hard to apply conventional simultaneous localization and mapping (SLAM) methods. Furthermore, for sensitive tasks like inspecting cracks, photorealistic mapping is very important. However, the behavior of Autonomous Underwater Vehicle (AUV) is computationally constrained. In this paper, we utilize a neural network-based image enhancement method to improve pose estimation and mapping quality and apply a sliding window-based mesh expansion method to enable lightweight, fast, and photorealistic mapping. To validate our results, we utilize real-world and indoor synthetic datasets. We performed qualitative validation with the real-world dataset and quantitative validation by modeling images from the indoor synthetic dataset as underwater scenes.
Read more4/30/2024