Opti-Acoustic Semantic SLAM with Unknown Objects in Underwater Environments

0
Sign in to get full access
Overview
- The paper discusses an approach for Simultaneous Localization and Mapping (SLAM) in underwater environments using a combination of optical and acoustic sensors.
- The key focus is on handling unknown objects, which is a common challenge in underwater SLAM due to the cluttered and dynamic nature of these environments.
- The proposed solution, called Opti-Acoustic Semantic SLAM, integrates vision-based object segmentation and acoustic measurements to build a semantic map and localize the robot in the presence of unknown objects.
Plain English Explanation
The researchers have developed a system that can help robots navigate and map underwater environments more effectively. Robots exploring the ocean often encounter many unknown objects, which can make it challenging for them to figure out where they are and create a detailed map of their surroundings.
The Opti-Acoustic Semantic SLAM approach combines information from optical (visual) sensors and acoustic (sonar) sensors to address this problem. The optical sensors are used to detect and segment objects in the environment, even if they are unknown. The acoustic sensors then provide additional information about the shape and location of these objects, which helps the robot build a more accurate semantic map of its surroundings.
By integrating these two types of sensors, the robot can better understand the environment and its own position within it, even when faced with unfamiliar objects. This can be particularly useful for applications like underwater exploration, monitoring, and navigation, where robots need to operate in complex and changing environments.
Technical Explanation
The Opti-Acoustic Semantic SLAM system uses a combination of optical and acoustic sensors to build a semantic map and localize the robot in underwater environments.
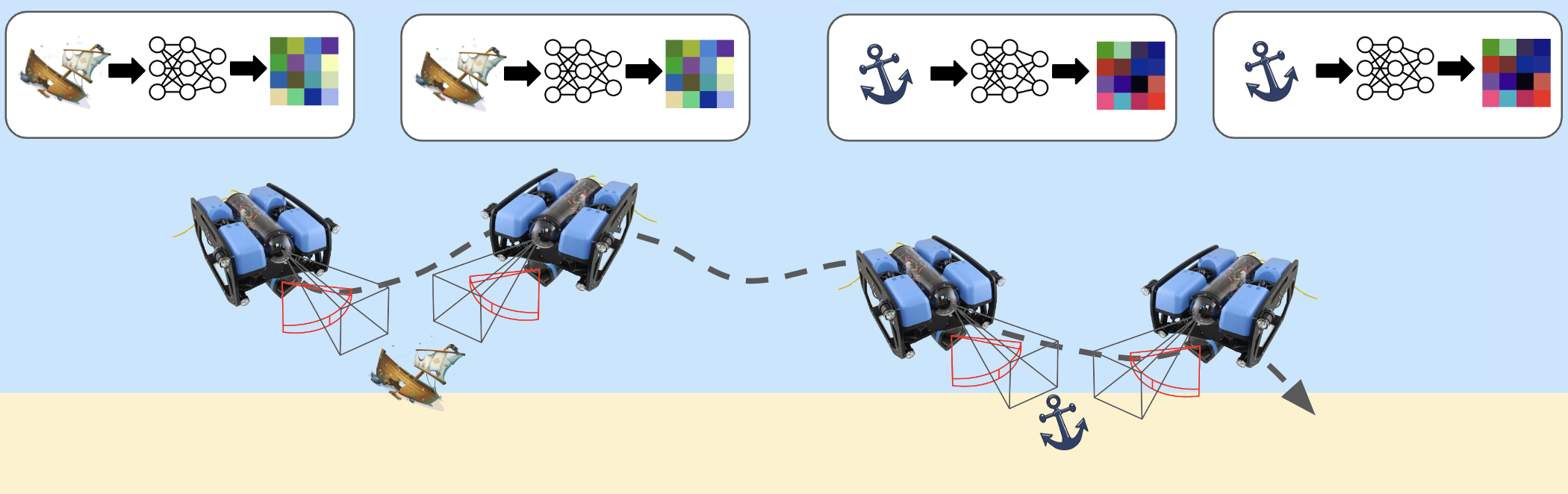
The optical sensor component employs a deep learning-based object segmentation approach to detect and classify objects in the environment, including unknown objects that do not belong to the training dataset. This visual information is then combined with acoustic measurements from sonar sensors to obtain a more complete understanding of the object's shape, size, and location.
The system uses this multimodal data to construct a semantic map that includes the detected objects and their properties. It then leverages this map to localize the robot within the environment, even in the presence of unknown objects that could otherwise confuse a traditional SLAM system.
The researchers evaluate their approach in simulated underwater environments and demonstrate its ability to accurately map the surroundings and localize the robot, outperforming previous methods that relied solely on visual or acoustic data.
Critical Analysis
The Opti-Acoustic Semantic SLAM paper presents a promising approach for addressing the challenge of unknown objects in underwater SLAM. By integrating optical and acoustic sensors, the system can build a more comprehensive understanding of the environment, which is essential for reliable navigation and mapping in these complex, dynamic settings.
One potential limitation of the approach is its reliance on the availability and quality of both optical and acoustic sensors. In some underwater scenarios, one or the other sensor type may be more reliable or accessible, and the system's performance may be affected if it cannot obtain sufficient data from both modalities.
Additionally, the paper focuses on simulated environments, and further evaluation in real-world underwater settings would be valuable to assess the system's practical applicability and robustness. Factors such as sensor interference, water turbidity, and the diversity of unknown objects encountered in the field may present additional challenges that need to be addressed.
Conclusion
The Opti-Acoustic Semantic SLAM approach represents a significant step forward in addressing the problem of unknown objects in underwater SLAM. By combining optical and acoustic sensors, the system can build a more comprehensive understanding of the environment and accurately localize the robot, even in the presence of unfamiliar objects.
This work has the potential to enhance the capabilities of underwater robots, enabling them to navigate and explore complex environments more effectively. Further research and real-world testing could lead to even more robust and versatile solutions for underwater SLAM, benefiting a wide range of marine applications, from scientific exploration to infrastructure inspection and environmental monitoring.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Opti-Acoustic Semantic SLAM with Unknown Objects in Underwater Environments
Kurran Singh, Jungseok Hong, Nicholas R. Rypkema, John J. Leonard
Despite recent advances in semantic Simultaneous Localization and Mapping (SLAM) for terrestrial and aerial applications, underwater semantic SLAM remains an open and largely unaddressed research problem due to the unique sensing modalities and the object classes found underwater. This paper presents an object-based semantic SLAM method for underwater environments that can identify, localize, classify, and map a wide variety of marine objects without a priori knowledge of the object classes present in the scene. The method performs unsupervised object segmentation and object-level feature aggregation, and then uses opti-acoustic sensor fusion for object localization. Probabilistic data association is used to determine observation to landmark correspondences. Given such correspondences, the method then jointly optimizes landmark and vehicle position estimates. Indoor and outdoor underwater datasets with a wide variety of objects and challenging acoustic and lighting conditions are collected for evaluation and made publicly available. Quantitative and qualitative results show the proposed method achieves reduced trajectory error compared to baseline methods, and is able to obtain comparable map accuracy to a baseline closed-set method that requires hand-labeled data of all objects in the scene.
Read more9/19/2024

0
New!Open-Set Semantic Uncertainty Aware Metric-Semantic Graph Matching
Kurran Singh, John J. Leonard
Underwater object-level mapping requires incorporating visual foundation models to handle the uncommon and often previously unseen object classes encountered in marine scenarios. In this work, a metric of semantic uncertainty for open-set object detections produced by visual foundation models is calculated and then incorporated into an object-level uncertainty tracking framework. Object-level uncertainties and geometric relationships between objects are used to enable robust object-level loop closure detection for unknown object classes. The above loop closure detection problem is formulated as a graph-matching problem. While graph matching, in general, is NP-Complete, a solver for an equivalent formulation of the proposed graph matching problem as a graph editing problem is tested on multiple challenging underwater scenes. Results for this solver as well as three other solvers demonstrate that the proposed methods are feasible for real-time use in marine environments for the robust, open-set, multi-object, semantic-uncertainty-aware loop closure detection. Further experimental results on the KITTI dataset demonstrate that the method generalizes to large-scale terrestrial scenes.
Read more9/19/2024
👀
0
A Multi-Modal Approach Based on Large Vision Model for Close-Range Underwater Target Localization
Mingyang Yang, Zeyu Sha, Feitian Zhang
Underwater target localization uses real-time sensory measurements to estimate the position of underwater objects of interest, providing critical feedback information for underwater robots. While acoustic sensing is the most acknowledged method in underwater robots and possibly the only effective approach for long-range underwater target localization, such a sensing modality generally suffers from low resolution, high cost and high energy consumption, thus leading to a mediocre performance when applied to close-range underwater target localization. On the other hand, optical sensing has attracted increasing attention in the underwater robotics community for its advantages of high resolution and low cost, holding a great potential particularly in close-range underwater target localization. However, most existing studies in underwater optical sensing are restricted to specific types of targets due to the limited training data available. In addition, these studies typically focus on the design of estimation algorithms and ignore the influence of illumination conditions on the sensing performance, thus hindering wider applications in the real world. To address the aforementioned issues, this paper proposes a novel target localization method that assimilates both optical and acoustic sensory measurements to estimate the 3D positions of close-range underwater targets. A test platform with controllable illumination conditions is designed and developed to experimentally investigate the proposed multi-modal sensing approach. A large vision model is applied to process the optical imaging measurements, eliminating the requirement for training data acquisition, thus significantly expanding the scope of potential applications. Extensive experiments are conducted, the results of which validate the effectiveness of the proposed underwater target localization method.
Read more9/10/2024

0
LOSS-SLAM: Lightweight Open-Set Semantic Simultaneous Localization and Mapping
Kurran Singh, Tim Magoun, John J. Leonard
Enabling robots to understand the world in terms of objects is a critical building block towards higher level autonomy. The success of foundation models in vision has created the ability to segment and identify nearly all objects in the world. However, utilizing such objects to localize the robot and build an open-set semantic map of the world remains an open research question. In this work, a system of identifying, localizing, and encoding objects is tightly coupled with probabilistic graphical models for performing open-set semantic simultaneous localization and mapping (SLAM). Results are presented demonstrating that the proposed lightweight object encoding can be used to perform more accurate object-based SLAM than existing open-set methods, closed-set methods, and geometric methods while incurring a lower computational overhead than existing open-set mapping methods.
Read more4/9/2024