Multi-Modal Diffusion for Hand-Object Grasp Generation

0

Sign in to get full access
Overview
- This paper proposes a multi-modal diffusion model for generating hand-object grasps.
- The model learns a joint distribution of hand and object geometries to predict plausible grasps.
- The method aims to enable more flexible and realistic grasp synthesis compared to prior approaches.
Plain English Explanation
The researchers developed a new AI system that can generate realistic hand-object grasps. The system learns the relationship between the shape of a hand and the shape of an object, and then uses this knowledge to predict how a hand would likely grasp a particular object.
This is an important problem because being able to generate realistic grasps is key for applications like robotics, where a robot needs to be able to pick up and manipulate objects. Prior approaches had limitations in the types of grasps they could generate, but this new multi-modal diffusion model aims to create a more flexible and natural grasping capability.
The key idea is to model the joint distribution of hand and object geometries, rather than treating them separately. This allows the system to capture the intricate relationship between hand and object shape that determines a good grasp. The "multi-modal" aspect refers to the model handling both visual information about the object as well as the hand's kinematic structure.
Technical Explanation
The core of the proposed method is a multi-modal diffusion model that learns to generate plausible hand-object grasps. Diffusion models are a type of generative AI model that work by gradually adding noise to data and then learning to reverse that process to generate new samples.
In this case, the diffusion model is trained on a dataset of hand-object pairs, where each pair consists of a 3D hand mesh and a 3D object mesh. The model learns to capture the underlying joint distribution of hand and object geometries that correspond to feasible grasps.
At inference time, the model can take a new object as input and use the learned joint distribution to generate plausible hand poses that would allow grasping that object. This is done through an iterative refinement process guided by the diffusion model.
The authors show that their multi-modal diffusion approach outperforms prior grasp generation methods on a variety of object datasets, producing more diverse and realistic grasps. They also demonstrate the model's ability to generalize to novel objects not seen during training.
Critical Analysis
The paper provides a thorough technical description of the proposed multi-modal diffusion model and presents compelling empirical results. However, a few potential limitations are worth noting:
- The dataset used for training, while diverse, may not capture the full range of real-world object shapes and hand-object interactions. Further evaluation on more comprehensive datasets would be valuable.
- The model currently operates in a purely generative setting, without any constraints or objectives related to task-specific grasp quality. Incorporating such task-driven objectives could lead to even more suitable grasps for particular applications.
- The computational complexity of the iterative diffusion process may limit the real-time performance of the system, especially for applications that require rapid grasp generation.
Nonetheless, the core ideas presented in this work represent an important advance in the field of grasp synthesis, and the authors have provided a solid foundation for future research in this area.
Conclusion
This paper introduces a novel multi-modal diffusion model for generating realistic hand-object grasps. By learning the joint distribution of hand and object geometries, the system can produce diverse and plausible grasping poses that adapt to the shape of the target object.
The technical advances demonstrated in this work have the potential to significantly improve the grasp generation capabilities of robotic systems, enabling more natural and flexible object manipulation. As the authors note, further research is needed to address practical limitations and expand the model's capabilities, but this paper represents an important step forward in this critical area of AI and robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-Modal Diffusion for Hand-Object Grasp Generation
Jinkun Cao, Jingyuan Liu, Kris Kitani, Yi Zhou
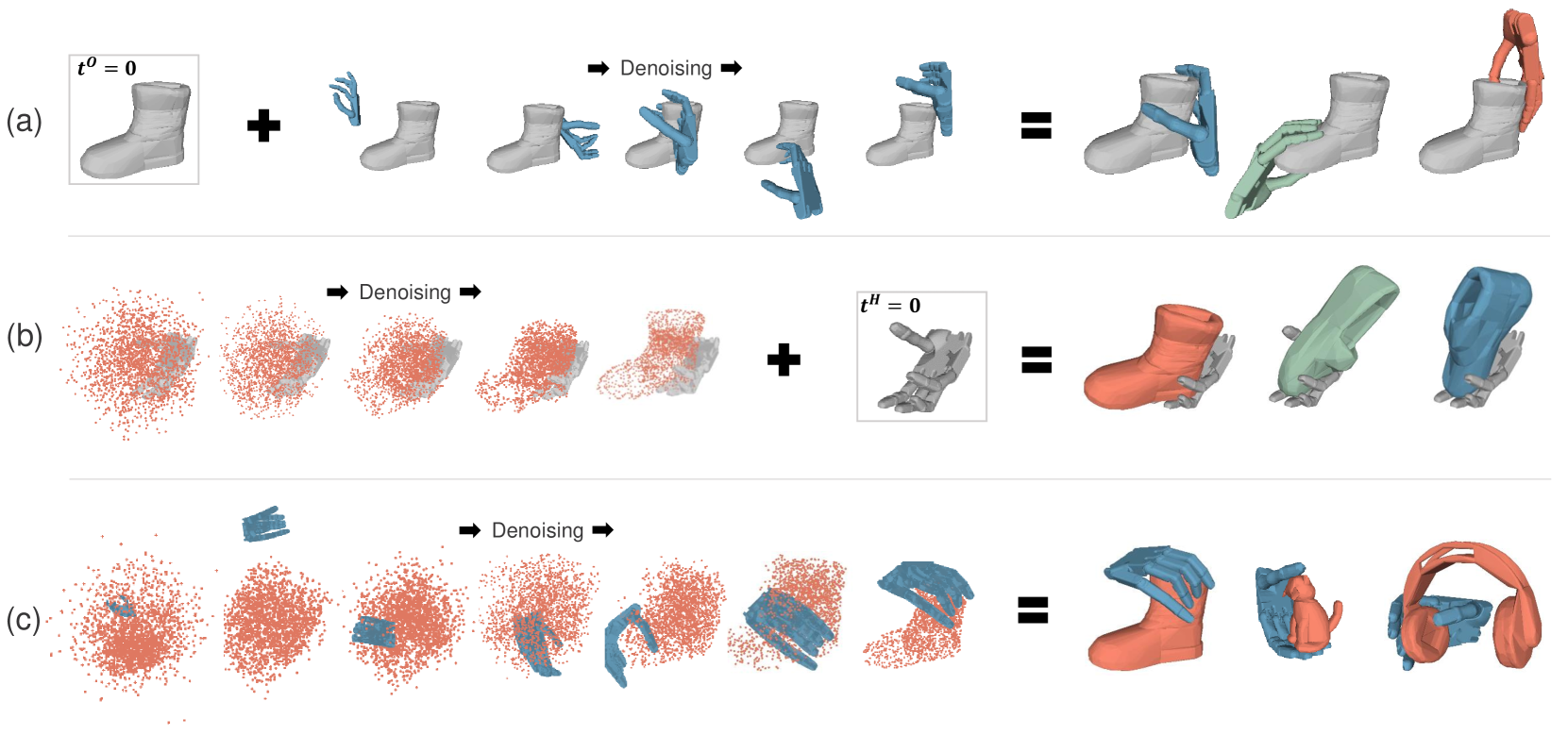
In this work, we focus on generating hand grasp over objects. Compared to previous works of generating hand poses with a given object, we aim to allow the generalization of both hand and object shapes by a single model. Our proposed method Multi-modal Grasp Diffusion (MGD) learns the prior and conditional posterior distribution of both modalities from heterogeneous data sources. Therefore it relieves the limitation of hand-object grasp datasets by leveraging the large-scale 3D object datasets. According to both qualitative and quantitative experiments, both conditional and unconditional generation of hand grasp achieve good visual plausibility and diversity. The proposed method also generalizes well to unseen object shapes. The code and weights will be available at url{https://github.com/noahcao/mgd}.
Read more9/10/2024
0
UGG: Unified Generative Grasping
Jiaxin Lu, Hao Kang, Haoxiang Li, Bo Liu, Yiding Yang, Qixing Huang, Gang Hua
Dexterous grasping aims to produce diverse grasping postures with a high grasping success rate. Regression-based methods that directly predict grasping parameters given the object may achieve a high success rate but often lack diversity. Generation-based methods that generate grasping postures conditioned on the object can often produce diverse grasping, but they are insufficient for high grasping success due to lack of discriminative information. To mitigate, we introduce a unified diffusion-based dexterous grasp generation model, dubbed the name UGG, which operates within the object point cloud and hand parameter spaces. Our all-transformer architecture unifies the information from the object, the hand, and the contacts, introducing a novel representation of contact points for improved contact modeling. The flexibility and quality of our model enable the integration of a lightweight discriminator, benefiting from simulated discriminative data, which pushes for a high success rate while preserving high diversity. Beyond grasp generation, our model can also generate objects based on hand information, offering valuable insights into object design and studying how the generative model perceives objects. Our model achieves state-of-the-art dexterous grasping on the large-scale DexGraspNet dataset while facilitating human-centric object design, marking a significant advancement in dexterous grasping research. Our project page is https://jiaxin-lu.github.io/ugg/.
Read more7/29/2024

0
DexGrasp-Diffusion: Diffusion-based Unified Functional Grasp Synthesis Pipeline for Multi-Dexterous Robotic Hands
Zhengshen Zhang, Lei Zhou, Chenchen Liu, Zhiyang Liu, Chengran Yuan, Sheng Guo, Ruiteng Zhao, Marcelo H. Ang Jr., Francis EH Tay
The versatility and adaptability of human grasping catalyze advancing dexterous robotic manipulation. While significant strides have been made in dexterous grasp generation, current research endeavors pivot towards optimizing object manipulation while ensuring functional integrity, emphasizing the synthesis of functional grasps following desired affordance instructions. This paper addresses the challenge of synthesizing functional grasps tailored to diverse dexterous robotic hands by proposing DexGrasp-Diffusion, an end-to-end modularized diffusion-based pipeline. DexGrasp-Diffusion integrates MultiHandDiffuser, a novel unified data-driven diffusion model for multi-dexterous hands grasp estimation, with DexDiscriminator, which employs a Physics Discriminator and a Functional Discriminator with open-vocabulary setting to filter physically plausible functional grasps based on object affordances. The experimental evaluation conducted on the MultiDex dataset provides substantiating evidence supporting the superior performance of MultiHandDiffuser over the baseline model in terms of success rate, grasp diversity, and collision depth. Moreover, we demonstrate the capacity of DexGrasp-Diffusion to reliably generate functional grasps for household objects aligned with specific affordance instructions.
Read more7/16/2024

0
G-HOP: Generative Hand-Object Prior for Interaction Reconstruction and Grasp Synthesis
Yufei Ye, Abhinav Gupta, Kris Kitani, Shubham Tulsiani
We propose G-HOP, a denoising diffusion based generative prior for hand-object interactions that allows modeling both the 3D object and a human hand, conditioned on the object category. To learn a 3D spatial diffusion model that can capture this joint distribution, we represent the human hand via a skeletal distance field to obtain a representation aligned with the (latent) signed distance field for the object. We show that this hand-object prior can then serve as generic guidance to facilitate other tasks like reconstruction from interaction clip and human grasp synthesis. We believe that our model, trained by aggregating seven diverse real-world interaction datasets spanning across 155 categories, represents a first approach that allows jointly generating both hand and object. Our empirical evaluations demonstrate the benefit of this joint prior in video-based reconstruction and human grasp synthesis, outperforming current task-specific baselines. Project website: https://judyye.github.io/ghop-www
Read more4/19/2024