Narrowing the Gap between Vision and Action in Navigation

0
Sign in to get full access
Overview
- The paper discusses the challenges in narrowing the gap between vision and action in navigation tasks.
- It presents a new approach to Vision and Language Navigation in the Continuous Environment (VLN-CE), which aims to improve the performance of embodied agents in real-world navigation.
- The paper introduces a novel architecture that combines language understanding, visual perception, and action planning to enable more effective navigation.
Plain English Explanation
The paper focuses on the problem of navigation, which is the ability of an embodied agent to move through an environment and reach a desired destination. This is a challenging task because it requires the agent to understand both the visual information it perceives and the language instructions it receives.
The authors propose a new approach called Vision and Language Navigation in the Continuous Environment (VLN-CE), which aims to improve the performance of embodied agents in real-world navigation tasks. Their key insight is that by combining language understanding, visual perception, and action planning, they can create a more effective navigation system.
The architecture they introduce includes several key components that work together to enable the agent to navigate successfully. For example, the language understanding module allows the agent to comprehend the instructions it receives, while the visual perception module helps it make sense of the environment around it. The action planning module then combines this information to decide the best course of action to take.
By integrating these different capabilities, the authors hope to narrow the gap between the agent's vision and its ability to take effective actions, ultimately leading to more successful and robust navigation.
Technical Explanation
The paper presents a novel architecture for Vision and Language Navigation in the Continuous Environment (VLN-CE), which aims to improve the performance of embodied agents in real-world navigation tasks. The key components of the architecture include:
-
Language Understanding: This module processes the natural language instructions provided to the agent, allowing it to comprehend the task and desired goal.
-
Visual Perception: This module analyzes the visual information the agent perceives from its environment, enabling it to understand the current state of the surroundings.
-
Action Planning: This module combines the language understanding and visual perception to plan the most appropriate sequence of actions the agent should take to navigate towards the desired goal.
The authors hypothesize that by tightly integrating these three components, the agent can more effectively bridge the gap between its visual perception and its ability to take meaningful actions, leading to improved navigation performance.
To evaluate their approach, the authors conduct experiments on the VLN-CE benchmark, which simulates real-world navigation tasks. The results show that their proposed architecture outperforms several state-of-the-art navigation models, demonstrating the potential of their approach to narrow the vision-action gap in embodied agents.
Critical Analysis
The paper presents a compelling approach to addressing the challenges of Vision and Language Navigation in continuous environments. The authors' focus on integrating language understanding, visual perception, and action planning is a promising direction and aligns with the broader goal of developing more capable and robust navigation systems.
However, the paper also acknowledges several limitations and areas for future research. For example, the authors note that their approach may still struggle in complex or ambiguous environments, where the agent's understanding of the visual information and language instructions may be insufficient. Additionally, the paper does not explore the scalability of the proposed architecture to larger-scale navigation tasks or its ability to generalize to diverse environments.
Further research could investigate ways to enhance the robustness and flexibility of the language understanding and visual perception modules, perhaps by incorporating more advanced learning techniques or leveraging additional sources of information. Exploring the integration of memory and planning mechanisms could also be a fruitful direction to further narrow the gap between vision and action in navigation tasks.
Conclusion
The paper presents a novel approach to Vision and Language Navigation in the Continuous Environment (VLN-CE) that aims to improve the performance of embodied agents by tightly integrating language understanding, visual perception, and action planning. The authors' architecture shows promising results on the VLN-CE benchmark, demonstrating the potential to narrow the gap between an agent's vision and its ability to take effective actions in navigation tasks.
While the paper highlights several limitations and areas for future research, the overall approach represents an important step towards developing more capable and robust navigation systems that can operate in real-world environments. As the field of embodied AI continues to advance, approaches like the one presented in this paper will be crucial in bridging the gap between vision and action, ultimately enabling agents to navigate their surroundings with greater efficiency and autonomy.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Narrowing the Gap between Vision and Action in Navigation
Yue Zhang, Parisa Kordjamshidi
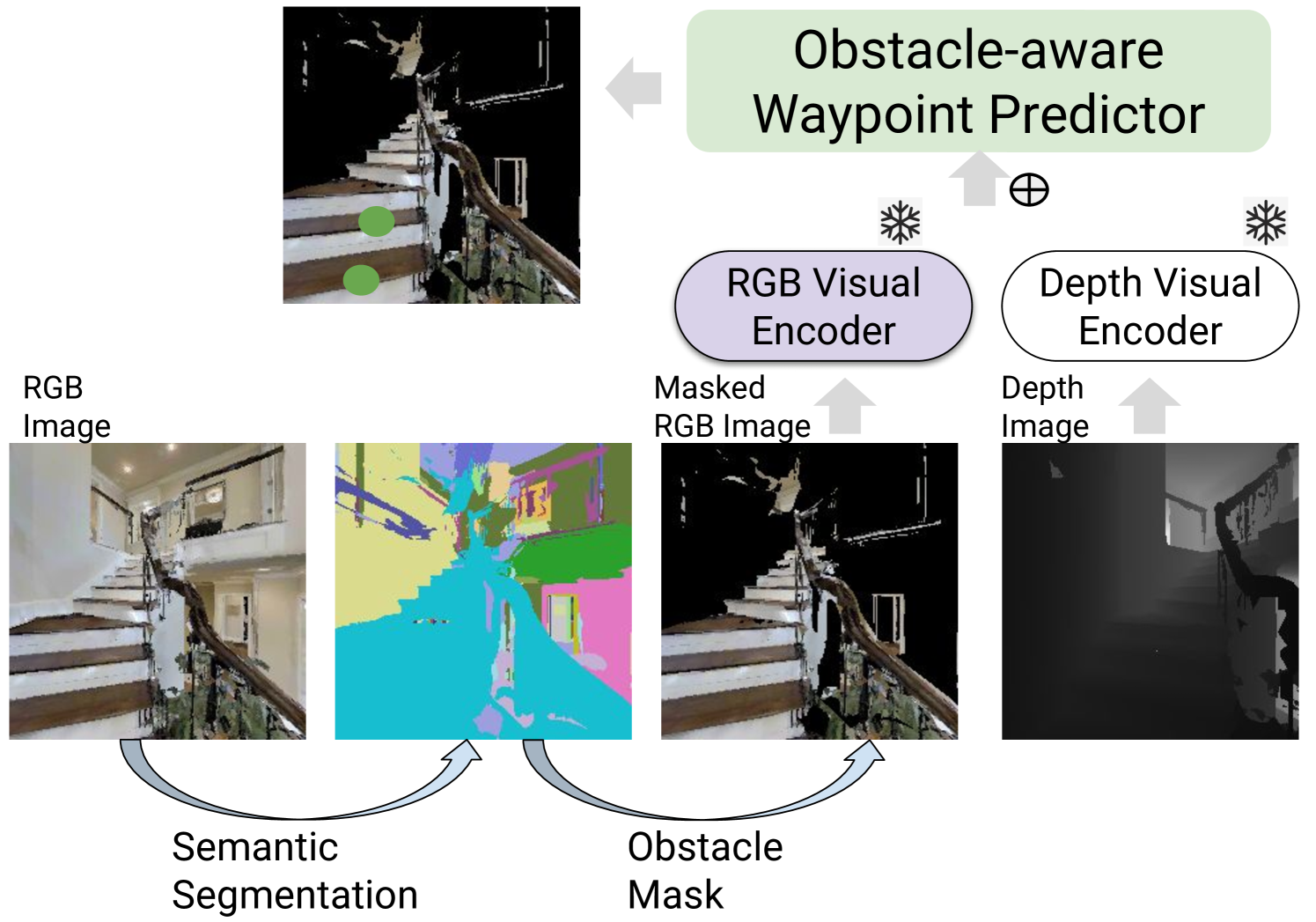
The existing methods for Vision and Language Navigation in the Continuous Environment (VLN-CE) commonly incorporate a waypoint predictor to discretize the environment. This simplifies the navigation actions into a view selection task and improves navigation performance significantly compared to direct training using low-level actions. However, the VLN-CE agents are still far from the real robots since there are gaps between their visual perception and executed actions. First, VLN-CE agents that discretize the visual environment are primarily trained with high-level view selection, which causes them to ignore crucial spatial reasoning within the low-level action movements. Second, in these models, the existing waypoint predictors neglect object semantics and their attributes related to passibility, which can be informative in indicating the feasibility of actions. To address these two issues, we introduce a low-level action decoder jointly trained with high-level action prediction, enabling the current VLN agent to learn and ground the selected visual view to the low-level controls. Moreover, we enhance the current waypoint predictor by utilizing visual representations containing rich semantic information and explicitly masking obstacles based on humans' prior knowledge about the feasibility of actions. Empirically, our agent can improve navigation performance metrics compared to the strong baselines on both high-level and low-level actions.
Read more8/21/2024

0
Vision-Language Navigation with Continual Learning
Zhiyuan Li, Yanfeng Lv, Ziqin Tu, Di Shang, Hong Qiao
Vision-language navigation (VLN) is a critical domain within embedded intelligence, requiring agents to navigate 3D environments based on natural language instructions. Traditional VLN research has focused on improving environmental understanding and decision accuracy. However, these approaches often exhibit a significant performance gap when agents are deployed in novel environments, mainly due to the limited diversity of training data. Expanding datasets to cover a broader range of environments is impractical and costly. We propose the Vision-Language Navigation with Continual Learning (VLNCL) paradigm to address this challenge. In this paradigm, agents incrementally learn new environments while retaining previously acquired knowledge. VLNCL enables agents to maintain an environmental memory and extract relevant knowledge, allowing rapid adaptation to new environments while preserving existing information. We introduce a novel dual-loop scenario replay method (Dual-SR) inspired by brain memory replay mechanisms integrated with VLN agents. This method facilitates consolidating past experiences and enhances generalization across new tasks. By utilizing a multi-scenario memory buffer, the agent efficiently organizes and replays task memories, thereby bolstering its ability to adapt quickly to new environments and mitigating catastrophic forgetting. Our work pioneers continual learning in VLN agents, introducing a novel experimental setup and evaluation metrics. We demonstrate the effectiveness of our approach through extensive evaluations and establish a benchmark for the VLNCL paradigm. Comparative experiments with existing continual learning and VLN methods show significant improvements, achieving state-of-the-art performance in continual learning ability and highlighting the potential of our approach in enabling rapid adaptation while preserving prior knowledge.
Read more9/5/2024

0
NavGPT-2: Unleashing Navigational Reasoning Capability for Large Vision-Language Models
Gengze Zhou, Yicong Hong, Zun Wang, Xin Eric Wang, Qi Wu
Capitalizing on the remarkable advancements in Large Language Models (LLMs), there is a burgeoning initiative to harness LLMs for instruction following robotic navigation. Such a trend underscores the potential of LLMs to generalize navigational reasoning and diverse language understanding. However, a significant discrepancy in agent performance is observed when integrating LLMs in the Vision-and-Language navigation (VLN) tasks compared to previous downstream specialist models. Furthermore, the inherent capacity of language to interpret and facilitate communication in agent interactions is often underutilized in these integrations. In this work, we strive to bridge the divide between VLN-specialized models and LLM-based navigation paradigms, while maintaining the interpretative prowess of LLMs in generating linguistic navigational reasoning. By aligning visual content in a frozen LLM, we encompass visual observation comprehension for LLMs and exploit a way to incorporate LLMs and navigation policy networks for effective action predictions and navigational reasoning. We demonstrate the data efficiency of the proposed methods and eliminate the gap between LM-based agents and state-of-the-art VLN specialists.
Read more7/18/2024
🏅
0
Safe-VLN: Collision Avoidance for Vision-and-Language Navigation of Autonomous Robots Operating in Continuous Environments
Lu Yue, Dongliang Zhou, Liang Xie, Feitian Zhang, Ye Yan, Erwei Yin
The task of vision-and-language navigation in continuous environments (VLN-CE) aims at training an autonomous agent to perform low-level actions to navigate through 3D continuous surroundings using visual observations and language instructions. The significant potential of VLN-CE for mobile robots has been demonstrated across a large number of studies. However, most existing works in VLN-CE focus primarily on transferring the standard discrete vision-and-language navigation (VLN) methods to continuous environments, overlooking the problem of collisions. Such oversight often results in the agent deviating from the planned path or, in severe instances, the agent being trapped in obstacle areas and failing the navigational task. To address the above-mentioned issues, this paper investigates various collision scenarios within VLN-CE and proposes a classification method to predicate the underlying causes of collisions. Furthermore, a new VLN-CE algorithm, named Safe-VLN, is proposed to bolster collision avoidance capabilities including two key components, i.e., a waypoint predictor and a navigator. In particular, the waypoint predictor leverages a simulated 2D LiDAR occupancy mask to prevent the predicted waypoints from being situated in obstacle-ridden areas. The navigator, on the other hand, employs the strategy of `re-selection after collision' to prevent the robot agent from becoming ensnared in a cycle of perpetual collisions. The proposed Safe-VLN is evaluated on the R2R-CE, the results of which demonstrate an enhanced navigational performance and a statistically significant reduction in collision incidences.
Read more4/15/2024