Neural Implicit Representation for Highly Dynamic LiDAR Mapping and Odometry

0

Sign in to get full access
Overview
- The paper introduces a neural implicit representation for highly dynamic LiDAR mapping and odometry.
- It proposes a novel approach to handle the challenges of dynamic environments in LiDAR-based mapping and localization.
- The method uses a neural network to learn a continuous 3D representation of the environment, enabling efficient mapping and odometry estimation.
Plain English Explanation
The paper presents a new way to create detailed 3D maps and track the motion of a sensor (like a LiDAR) in highly dynamic environments. Typical 3D mapping methods struggle when there are lots of moving objects, like people or cars, but this new approach uses a neural network to learn a continuous representation of the 3D space.
This allows the system to efficiently update the map as things move around, rather than having to completely rebuild the map from scratch. The neural network-based representation also enables accurate estimation of the sensor's position and orientation (known as odometry) even in the presence of dynamic objects.
This is an important advance for applications like self-driving cars, robots, and augmented reality, where reliable 3D mapping and sensor localization are critical, especially in crowded or changing environments.
Technical Explanation
The paper introduces a neural implicit representation for LiDAR mapping and odometry that can handle highly dynamic scenes. It builds on recent work in neural radiance fields and dynamic SLAM to address the limitations of traditional approaches.
The key idea is to learn a continuous 3D representation of the environment using a neural network. This allows the system to efficiently update the map as objects move, rather than having to rebuild the entire map. The neural network also provides a way to estimate the sensor's 6-DoF pose (position and orientation) by relating the current observations to the learned representation.
The authors evaluate their approach on public LiDAR datasets, demonstrating improved mapping accuracy and odometry estimation compared to state-of-the-art methods, especially in dynamic environments. They analyze the tradeoffs between map quality, computation time, and robustness to changes.
Critical Analysis
The paper makes a compelling case for using neural implicit representations to address the challenges of LiDAR mapping and odometry in dynamic scenes. The proposed approach seems to offer significant benefits over traditional techniques, particularly in terms of handling moving objects.
However, the authors do note some limitations and potential avenues for future work. For example, the current method may struggle with very rapid or unpredictable motions, and the neural network training process can be computationally intensive. Further research could explore ways to address these issues, such as incorporating additional sensors or developing more efficient training techniques.
Additionally, while the paper demonstrates the method's performance on public datasets, it would be valuable to see it evaluated in real-world deployments to understand its practical limitations and edge cases. Robustness to sensor noise, varying environmental conditions, and other real-world factors should also be investigated.
Overall, the paper presents a promising direction for improving LiDAR-based mapping and localization, with potential implications for a wide range of robotic and autonomous systems operating in dynamic environments.
Conclusion
This paper introduces a neural implicit representation for LiDAR mapping and odometry that can effectively handle highly dynamic scenes. By learning a continuous 3D model of the environment using a neural network, the system can efficiently update the map as objects move and provide accurate sensor localization.
The approach represents an important advance in the field of 3D mapping and SLAM, particularly for applications like self-driving cars, robots, and augmented reality, where reliable performance in changing environments is crucial. While the method has some limitations that warrant further research, the results demonstrate the potential of neural implicit representations to overcome the challenges of traditional LiDAR-based techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Neural Implicit Representation for Highly Dynamic LiDAR Mapping and Odometry
Qi Zhang, He Wang, Ru Li, Wenbin Li
Recent advancements in Simultaneous Localization and Mapping (SLAM) have increasingly highlighted the robustness of LiDAR-based techniques. At the same time, Neural Radiance Fields (NeRF) have introduced new possibilities for 3D scene reconstruction, exemplified by SLAM systems. Among these, NeRF-LOAM has shown notable performance in NeRF-based SLAM applications. However, despite its strengths, these systems often encounter difficulties in dynamic outdoor environments due to their inherent static assumptions. To address these limitations, this paper proposes a novel method designed to improve reconstruction in highly dynamic outdoor scenes. Based on NeRF-LOAM, the proposed approach consists of two primary components. First, we separate the scene into static background and dynamic foreground. By identifying and excluding dynamic elements from the mapping process, this segmentation enables the creation of a dense 3D map that accurately represents the static background only. The second component extends the octree structure to support multi-resolution representation. This extension not only enhances reconstruction quality but also aids in the removal of dynamic objects identified by the first module. Additionally, Fourier feature encoding is applied to the sampled points, capturing high-frequency information and leading to more complete reconstruction results. Evaluations on various datasets demonstrate that our method achieves more competitive results compared to current state-of-the-art approaches.
Read more9/27/2024
🧠
0
TivNe-SLAM: Dynamic Mapping and Tracking via Time-Varying Neural Radiance Fields
Chengyao Duan, Zhiliu Yang
Previous attempts to integrate Neural Radiance Fields (NeRF) into the Simultaneous Localization and Mapping (SLAM) framework either rely on the assumption of static scenes or require the ground truth camera poses, which impedes their application in real-world scenarios. This paper proposes a time-varying representation to track and reconstruct the dynamic scenes. Firstly, two processes, a tracking process and a mapping process, are maintained simultaneously in our framework. In the tracking process, all input images are uniformly sampled and then progressively trained in a self-supervised paradigm. In the mapping process, we leverage motion masks to distinguish dynamic objects from the static background, and sample more pixels from dynamic areas. Secondly, the parameter optimization for both processes is comprised of two stages: the first stage associates time with 3D positions to convert the deformation field to the canonical field. The second stage associates time with the embeddings of the canonical field to obtain colors and a Signed Distance Function (SDF). Lastly, we propose a novel keyframe selection strategy based on the overlapping rate. Our approach is evaluated on two synthetic datasets and one real-world dataset, and the experiments validate that our method achieves competitive results in both tracking and mapping when compared to existing state-of-the-art NeRF-based dynamic SLAM systems.
Read more9/10/2024

0
DiL-NeRF: Delving into Lidar for Neural Radiance Field on Street Scenes
Shanlin Sun, Bingbing Zhuang, Ziyu Jiang, Buyu Liu, Xiaohui Xie, Manmohan Chandraker
Photorealistic simulation plays a crucial role in applications such as autonomous driving, where advances in neural radiance fields (NeRFs) may allow better scalability through the automatic creation of digital 3D assets. However, reconstruction quality suffers on street scenes due to largely collinear camera motions and sparser samplings at higher speeds. On the other hand, the application often demands rendering from camera views that deviate from the inputs to accurately simulate behaviors like lane changes. In this paper, we propose several insights that allow a better utilization of Lidar data to improve NeRF quality on street scenes. First, our framework learns a geometric scene representation from Lidar, which is fused with the implicit grid-based representation for radiance decoding, thereby supplying stronger geometric information offered by explicit point cloud. Second, we put forth a robust occlusion-aware depth supervision scheme, which allows utilizing densified Lidar points by accumulation. Third, we generate augmented training views from Lidar points for further improvement. Our insights translate to largely improved novel view synthesis under real driving scenes.
Read more5/7/2024
0
RoDyn-SLAM: Robust Dynamic Dense RGB-D SLAM with Neural Radiance Fields
Haochen Jiang, Yueming Xu, Kejie Li, Jianfeng Feng, Li Zhang
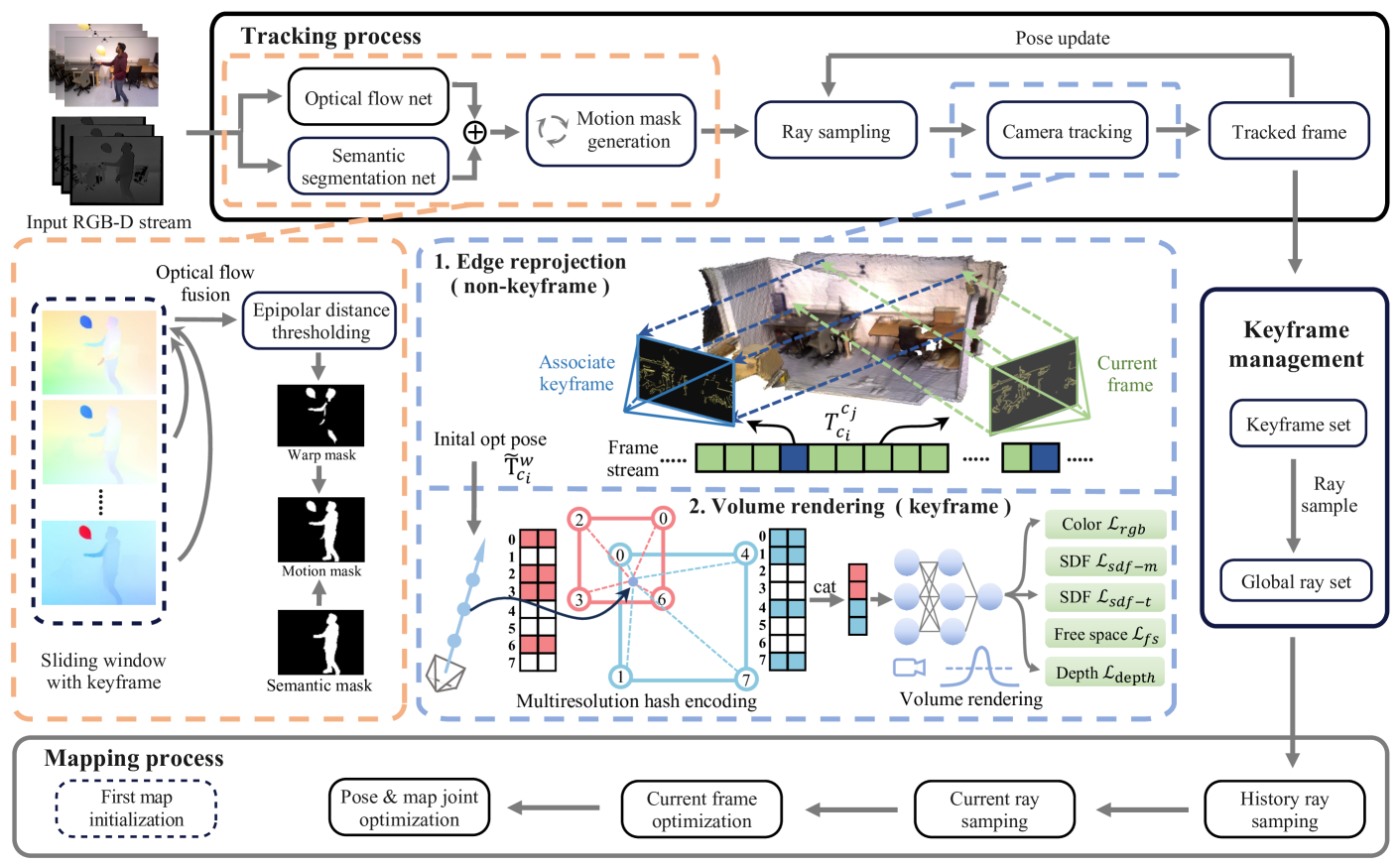
Leveraging neural implicit representation to conduct dense RGB-D SLAM has been studied in recent years. However, this approach relies on a static environment assumption and does not work robustly within a dynamic environment due to the inconsistent observation of geometry and photometry. To address the challenges presented in dynamic environments, we propose a novel dynamic SLAM framework with neural radiance field. Specifically, we introduce a motion mask generation method to filter out the invalid sampled rays. This design effectively fuses the optical flow mask and semantic mask to enhance the precision of motion mask. To further improve the accuracy of pose estimation, we have designed a divide-and-conquer pose optimization algorithm that distinguishes between keyframes and non-keyframes. The proposed edge warp loss can effectively enhance the geometry constraints between adjacent frames. Extensive experiments are conducted on the two challenging datasets, and the results show that RoDyn-SLAM achieves state-of-the-art performance among recent neural RGB-D methods in both accuracy and robustness.
Read more7/2/2024