TivNe-SLAM: Dynamic Mapping and Tracking via Time-Varying Neural Radiance Fields

0
🧠
Sign in to get full access
Overview
- Previous NeRF-based dynamic SLAM methods relied on static scenes or required ground truth camera poses
- This paper proposes a time-varying representation to track and reconstruct dynamic scenes
- Two processes are maintained: a tracking process and a mapping process
- Parameter optimization is done in two stages to associate time with 3D positions and embeddings
- A novel keyframe selection strategy based on overlapping rate is proposed
- The method is evaluated on synthetic and real-world datasets and achieves competitive results
Plain English Explanation
This paper addresses a problem with previous Neural Radiance Fields (NeRF) based dynamic Simultaneous Localization and Mapping (SLAM) systems. Those methods either assumed the scene was static or required knowing the exact camera positions ahead of time, which limited their usefulness in real-world situations.
The key idea here is to use a "time-varying" representation to track and reconstruct dynamic scenes. The system maintains two parallel processes - a tracking process that trains on all input images, and a mapping process that focuses on distinguishing dynamic objects from the static background.
The parameter optimization is done in two stages. First, it associates time with 3D positions to convert the deformation field to a canonical field. Then it associates time with the embeddings of this canonical field to get color and Signed Distance Function (SDF) information.
Finally, the method uses a novel strategy to select keyframes based on how much overlap there is between them. This helps improve the tracking and mapping performance.
The approach is tested on both synthetic and real-world datasets, and the results show it performs well compared to other state-of-the-art NeRF-based dynamic SLAM systems.
Technical Explanation
The core of this paper is a dynamic SLAM framework that uses a time-varying NeRF representation to track and reconstruct dynamic scenes. Unlike previous NeRF-based methods, this does not rely on the assumption of static scenes or require ground truth camera poses, making it more applicable to real-world scenarios.
The key components are:
-
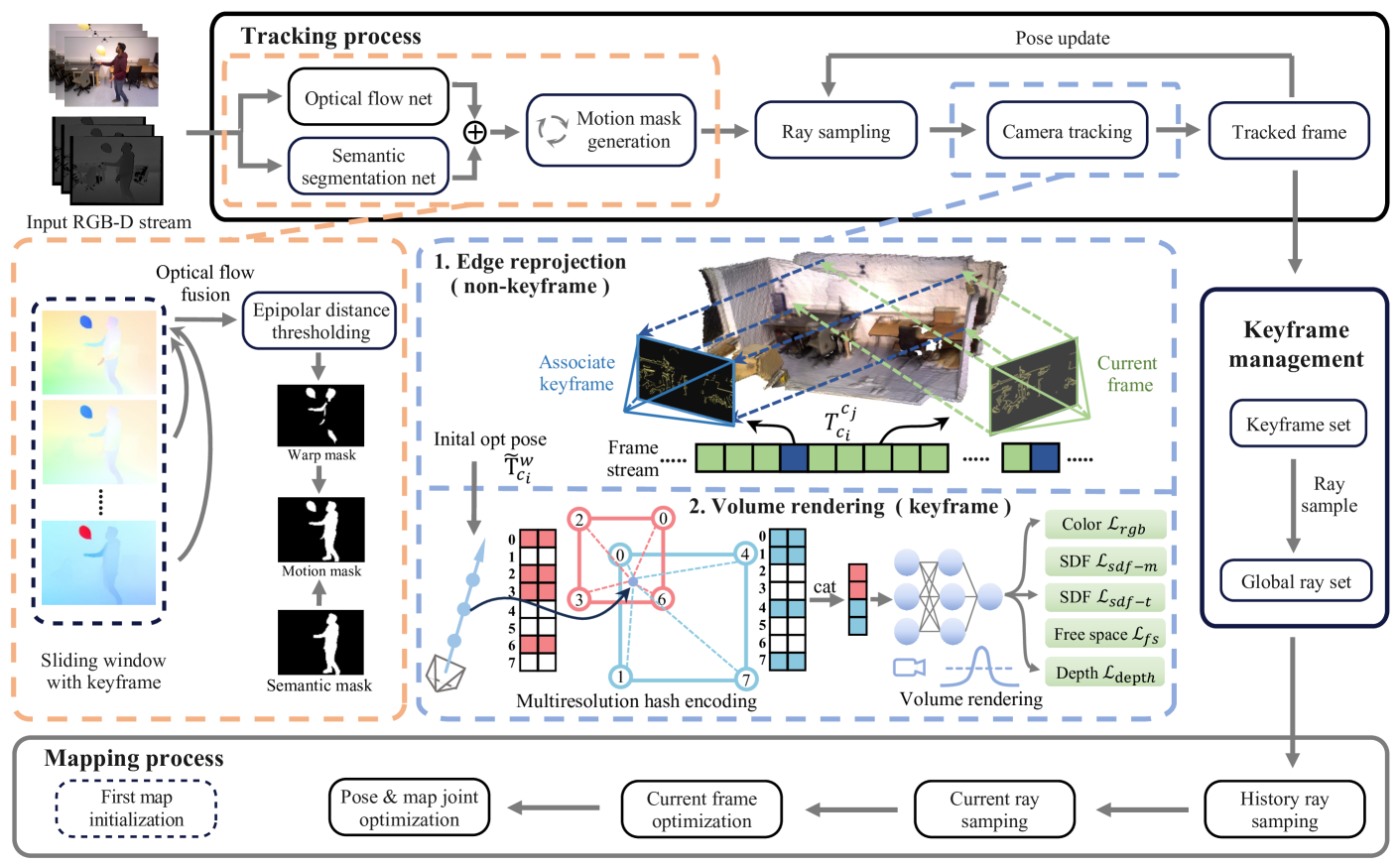
Tracking and Mapping Processes: The system maintains two parallel processes - a tracking process that uniformly samples and progressively trains on all input images, and a mapping process that leverages motion masks to distinguish dynamic objects from the static background and sample more pixels from dynamic areas.
-
Two-Stage Parameter Optimization: The parameter optimization is done in two stages. The first stage associates time with 3D positions to convert the deformation field to a canonical field. The second stage associates time with the embeddings of this canonical field to obtain colors and an SDF.
-
Keyframe Selection Strategy: The paper proposes a novel keyframe selection strategy based on the overlapping rate between frames, which helps improve the tracking and mapping performance.
The experiments on synthetic and real-world datasets show that this approach achieves competitive results in both tracking and mapping compared to existing state-of-the-art NeRF-based dynamic SLAM systems.
Critical Analysis
While the proposed method represents an interesting advance in NeRF-based dynamic SLAM, there are a few potential limitations and areas for further research:
-
Computational Complexity: Maintaining two parallel processes and performing the two-stage optimization may increase the computational cost of the system, which could be a challenge for real-time applications.
-
Sensitivity to Motion Masks: The performance of the mapping process relies heavily on the accuracy of the motion masks used to distinguish dynamic and static elements. Errors in the motion masks could negatively impact the reconstruction quality.
-
Generalization to Diverse Scenes: The evaluation was conducted on a limited set of datasets, and it would be valuable to test the method's performance on a wider range of dynamic scenes with varying types and complexities of motion.
-
Incorporating Additional Sensors: Exploring the integration of this approach with other sensor modalities, such as LiDAR, could potentially improve the robustness and accuracy of the dynamic scene reconstruction.
Overall, this paper presents a promising step forward in NeRF-based dynamic SLAM, and further research in this direction could lead to significant advancements in the field of real-time 3D reconstruction of dynamic environments.
Conclusion
This paper introduces a time-varying NeRF representation for dynamic SLAM that can track and reconstruct dynamic scenes without relying on the assumption of static scenes or requiring ground truth camera poses. The key innovations are the parallel tracking and mapping processes, the two-stage parameter optimization, and the novel keyframe selection strategy.
The experimental results demonstrate the effectiveness of this approach compared to existing NeRF-based dynamic SLAM systems. While there are still some potential limitations, this research represents an important step forward in enabling real-world applications of dynamic 3D reconstruction, with implications for areas such as autonomous navigation, augmented reality, and robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
0
TivNe-SLAM: Dynamic Mapping and Tracking via Time-Varying Neural Radiance Fields
Chengyao Duan, Zhiliu Yang
Previous attempts to integrate Neural Radiance Fields (NeRF) into the Simultaneous Localization and Mapping (SLAM) framework either rely on the assumption of static scenes or require the ground truth camera poses, which impedes their application in real-world scenarios. This paper proposes a time-varying representation to track and reconstruct the dynamic scenes. Firstly, two processes, a tracking process and a mapping process, are maintained simultaneously in our framework. In the tracking process, all input images are uniformly sampled and then progressively trained in a self-supervised paradigm. In the mapping process, we leverage motion masks to distinguish dynamic objects from the static background, and sample more pixels from dynamic areas. Secondly, the parameter optimization for both processes is comprised of two stages: the first stage associates time with 3D positions to convert the deformation field to the canonical field. The second stage associates time with the embeddings of the canonical field to obtain colors and a Signed Distance Function (SDF). Lastly, we propose a novel keyframe selection strategy based on the overlapping rate. Our approach is evaluated on two synthetic datasets and one real-world dataset, and the experiments validate that our method achieves competitive results in both tracking and mapping when compared to existing state-of-the-art NeRF-based dynamic SLAM systems.
Read more9/10/2024
0
RoDyn-SLAM: Robust Dynamic Dense RGB-D SLAM with Neural Radiance Fields
Haochen Jiang, Yueming Xu, Kejie Li, Jianfeng Feng, Li Zhang
Leveraging neural implicit representation to conduct dense RGB-D SLAM has been studied in recent years. However, this approach relies on a static environment assumption and does not work robustly within a dynamic environment due to the inconsistent observation of geometry and photometry. To address the challenges presented in dynamic environments, we propose a novel dynamic SLAM framework with neural radiance field. Specifically, we introduce a motion mask generation method to filter out the invalid sampled rays. This design effectively fuses the optical flow mask and semantic mask to enhance the precision of motion mask. To further improve the accuracy of pose estimation, we have designed a divide-and-conquer pose optimization algorithm that distinguishes between keyframes and non-keyframes. The proposed edge warp loss can effectively enhance the geometry constraints between adjacent frames. Extensive experiments are conducted on the two challenging datasets, and the results show that RoDyn-SLAM achieves state-of-the-art performance among recent neural RGB-D methods in both accuracy and robustness.
Read more7/2/2024

0
How NeRFs and 3D Gaussian Splatting are Reshaping SLAM: a Survey
Fabio Tosi, Youmin Zhang, Ziren Gong, Erik Sandstrom, Stefano Mattoccia, Martin R. Oswald, Matteo Poggi
Over the past two decades, research in the field of Simultaneous Localization and Mapping (SLAM) has undergone a significant evolution, highlighting its critical role in enabling autonomous exploration of unknown environments. This evolution ranges from hand-crafted methods, through the era of deep learning, to more recent developments focused on Neural Radiance Fields (NeRFs) and 3D Gaussian Splatting (3DGS) representations. Recognizing the growing body of research and the absence of a comprehensive survey on the topic, this paper aims to provide the first comprehensive overview of SLAM progress through the lens of the latest advancements in radiance fields. It sheds light on the background, evolutionary path, inherent strengths and limitations, and serves as a fundamental reference to highlight the dynamic progress and specific challenges.
Read more4/12/2024

0
CTNeRF: Cross-Time Transformer for Dynamic Neural Radiance Field from Monocular Video
Xingyu Miao, Yang Bai, Haoran Duan, Yawen Huang, Fan Wan, Yang Long, Yefeng Zheng
The goal of our work is to generate high-quality novel views from monocular videos of complex and dynamic scenes. Prior methods, such as DynamicNeRF, have shown impressive performance by leveraging time-varying dynamic radiation fields. However, these methods have limitations when it comes to accurately modeling the motion of complex objects, which can lead to inaccurate and blurry renderings of details. To address this limitation, we propose a novel approach that builds upon a recent generalization NeRF, which aggregates nearby views onto new viewpoints. However, such methods are typically only effective for static scenes. To overcome this challenge, we introduce a module that operates in both the time and frequency domains to aggregate the features of object motion. This allows us to learn the relationship between frames and generate higher-quality images. Our experiments demonstrate significant improvements over state-of-the-art methods on dynamic scene datasets. Specifically, our approach outperforms existing methods in terms of both the accuracy and visual quality of the synthesized views. Our code is available on https://github.com/xingy038/CTNeRF.
Read more6/27/2024