Neuromorphic quadratic programming for efficient and scalable model predictive control
2401.14885
0
0
Abstract
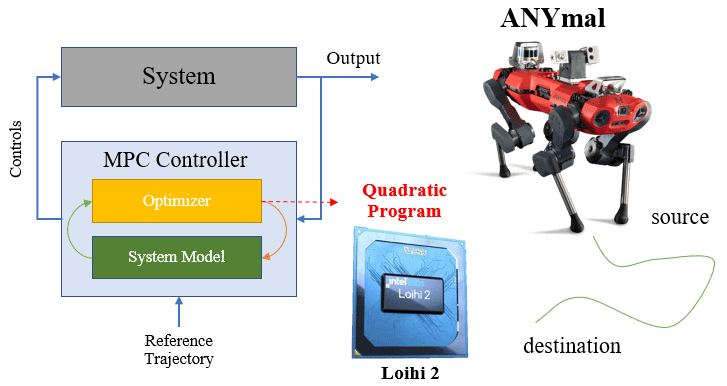
Applications in robotics or other size-, weight- and power-constrained autonomous systems at the edge often require real-time and low-energy solutions to large optimization problems. Event-based and memory-integrated neuromorphic architectures promise to solve such optimization problems with superior energy efficiency and performance compared to conventional von Neumann architectures. Here, we present a method to solve convex continuous optimization problems with quadratic cost functions and linear constraints on Intel's scalable neuromorphic research chip Loihi 2. When applied to model predictive control (MPC) problems for the quadruped robotic platform ANYmal, this method achieves over two orders of magnitude reduction in combined energy-delay product compared to the state-of-the-art solver, OSQP, on (edge) CPUs and GPUs with solution times under ten milliseconds for various problem sizes. These results demonstrate the benefit of non-von-Neumann architectures for robotic control applications.
Create account to get full access
Overview
- This paper explores the use of neuromorphic hardware for efficient and scalable model predictive control (MPC) by solving quadratic programming (QP) problems.
- It proposes a neuromorphic approach to solve QP problems, which are a key component of MPC, using spiking neural networks and distributed discrete dynamical systems.
- The goal is to enable MPC to be deployed on resource-constrained hardware like embedded systems and mobile devices, improving its efficiency and scalability.
Plain English Explanation
The paper is about using a new type of computer hardware called "neuromorphic" to solve a specific mathematical problem called "quadratic programming" (QP). This QP problem is an important part of a technique called "model predictive control" (MPC), which is used to control complex systems like robots or power grids.
Traditionally, solving QP problems for MPC requires a lot of computing power, which can make it hard to use MPC on smaller, less powerful devices like embedded systems or phones. The researchers in this paper try to solve the QP problem in a more efficient way using neuromorphic hardware.
Neuromorphic hardware is inspired by the way the human brain works, using networks of simple processing units (like neurons) that communicate with each other using spikes of electrical activity. The researchers show how they can map the QP problem onto this type of neuromorphic hardware, allowing it to be solved much more efficiently than on conventional computers.
This could enable MPC to be used in a wider range of applications, especially on smaller, more resource-constrained devices where it was previously too computationally intensive to be practical. The neuromorphic approach could make MPC more scalable and practical for real-world use cases.
Technical Explanation
The paper proposes a neuromorphic approach to solving quadratic programming (QP) problems, which are a key component of model predictive control (MPC) algorithms. By mapping the QP problem onto spiking neural networks and distributed discrete dynamical systems, the authors demonstrate an efficient and scalable way to deploy MPC on resource-constrained hardware.
The core idea is to reformulate the QP problem as a dynamical system that can be implemented using neuromorphic hardware. This involves representing the QP problem's objective function and constraints as interconnected "neurons" that communicate via spike-based signaling. The dynamics of this neuromorphic system naturally converge to the optimal solution of the QP problem.
The authors evaluate their approach on several benchmark MPC problems for linear and nonlinear systems, demonstrating significant improvements in computation time and energy efficiency compared to traditional QP solvers. They also show how their method can be integrated with existing MPC frameworks to enable deployment on resource-constrained platforms like microcontrollers.
Critical Analysis
The paper presents a promising approach to enabling efficient and scalable MPC using neuromorphic hardware, but there are a few potential limitations and areas for further research:
- The authors focus on convex QP problems, but many real-world MPC applications involve non-convex optimization challenges that may require further extensions of the neuromorphic approach.
- The evaluation is limited to relatively small-scale benchmark problems, and the scalability of the neuromorphic MPC solver to large-scale, high-dimensional systems remains to be demonstrated.
- The hardware requirements and implementation details for the proposed neuromorphic system are not fully specified, so the practical feasibility and cost-effectiveness of deploying this approach in real-world applications is unclear.
Despite these caveats, the core ideas presented in the paper are compelling and could spark further research into neuromorphic optimization techniques for MPC and other control applications. Continued advancements in this area could significantly expand the reach of MPC to a wider range of resource-constrained systems and settings.
Conclusion
This paper introduces a novel neuromorphic approach to solving quadratic programming problems, which are a critical component of model predictive control (MPC) algorithms. By mapping the QP problem onto spiking neural networks and distributed discrete dynamical systems, the authors demonstrate an efficient and scalable way to deploy MPC on resource-constrained hardware, such as embedded systems and mobile devices.
The key insight is that the dynamics of the neuromorphic system naturally converge to the optimal solution of the QP problem, enabling fast and energy-efficient computation. The authors show promising results on benchmark MPC problems, suggesting that this neuromorphic approach could significantly expand the reach of MPC to a wider range of real-world applications where computational efficiency and scalability are crucial.
While there are some limitations and areas for further research, the ideas presented in this paper represent an important step forward in bridging the gap between advanced control techniques and practical deployments on resource-constrained platforms. As neuromorphic hardware continues to evolve, the potential for efficient and scalable MPC solutions may become increasingly feasible, with far-reaching implications for fields like robotics, energy systems, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
➖
Parallel and Proximal Linear-Quadratic Methods for Real-Time Constrained Model-Predictive Control
Wilson Jallet (LAAS-GEPETTO, WILLOW), Ewen Dantec (WILLOW), Etienne Arlaud (WILLOW), Justin Carpentier (WILLOW, DI-ENS), Nicolas Mansard (LAAS-GEPETTO)
0
0
Recent strides in nonlinear model predictive control (NMPC) underscore a dependence on numerical advancements to efficiently and accurately solve large-scale problems. Given the substantial number of variables characterizing typical whole-body optimal control (OC) problems - often numbering in the thousands - exploiting the sparse structure of the numerical problem becomes crucial to meet computational demands, typically in the range of a few milliseconds. Addressing the linear-quadratic regulator (LQR) problem is a fundamental building block for computing Newton or Sequential Quadratic Programming (SQP) steps in direct optimal control methods. This paper concentrates on equality-constrained problems featuring implicit system dynamics and dual regularization, a characteristic of advanced interiorpoint or augmented Lagrangian solvers. Here, we introduce a parallel algorithm for solving an LQR problem with dual regularization. Leveraging a rewriting of the LQR recursion through block elimination, we first enhanced the efficiency of the serial algorithm and then subsequently generalized it to handle parametric problems. This extension enables us to split decision variables and solve multiple subproblems concurrently. Our algorithm is implemented in our nonlinear numerical optimal control library ALIGATOR. It showcases improved performance over previous serial formulations and we validate its efficacy by deploying it in the model predictive control of a real quadruped robot.
6/4/2024
Efficient model predictive control for nonlinear systems modelled by deep neural networks
Jianglin Lan
0
0
This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
5/20/2024
📈
Mapping back and forth between model predictive control and neural networks
Ross Drummond, Pablo R Baldivieso-Monasterios, Giorgio Valmorbida
0
0
Model predictive control (MPC) for linear systems with quadratic costs and linear constraints is shown to admit an exact representation as an implicit neural network. A method to unravel the implicit neural network of MPC into an explicit one is also introduced. As well as building links between model-based and data-driven control, these results emphasize the capability of implicit neural networks for representing solutions of optimisation problems, as such problems are themselves implicitly defined functions.
4/19/2024
🤿
TinyMPC: Model-Predictive Control on Resource-Constrained Microcontrollers
Khai Nguyen, Sam Schoedel, Anoushka Alavilli, Brian Plancher, Zachary Manchester
0
0
Model-predictive control (MPC) is a powerful tool for controlling highly dynamic robotic systems subject to complex constraints. However, MPC is computationally demanding, and is often impractical to implement on small, resource-constrained robotic platforms. We present TinyMPC, a high-speed MPC solver with a low memory footprint targeting the microcontrollers common on small robots. Our approach is based on the alternating direction method of multipliers (ADMM) and leverages the structure of the MPC problem for efficiency. We demonstrate TinyMPC's effectiveness by benchmarking against the state-of-the-art solver OSQP, achieving nearly an order of magnitude speed increase, as well as through hardware experiments on a 27 gram quadrotor, demonstrating high-speed trajectory tracking and dynamic obstacle avoidance. TinyMPC is publicly available at https://tinympc.org.
5/9/2024