Parallel and Proximal Linear-Quadratic Methods for Real-Time Constrained Model-Predictive Control
2405.09197
0
0
➖
Abstract
Recent strides in nonlinear model predictive control (NMPC) underscore a dependence on numerical advancements to efficiently and accurately solve large-scale problems. Given the substantial number of variables characterizing typical whole-body optimal control (OC) problems - often numbering in the thousands - exploiting the sparse structure of the numerical problem becomes crucial to meet computational demands, typically in the range of a few milliseconds. Addressing the linear-quadratic regulator (LQR) problem is a fundamental building block for computing Newton or Sequential Quadratic Programming (SQP) steps in direct optimal control methods. This paper concentrates on equality-constrained problems featuring implicit system dynamics and dual regularization, a characteristic of advanced interiorpoint or augmented Lagrangian solvers. Here, we introduce a parallel algorithm for solving an LQR problem with dual regularization. Leveraging a rewriting of the LQR recursion through block elimination, we first enhanced the efficiency of the serial algorithm and then subsequently generalized it to handle parametric problems. This extension enables us to split decision variables and solve multiple subproblems concurrently. Our algorithm is implemented in our nonlinear numerical optimal control library ALIGATOR. It showcases improved performance over previous serial formulations and we validate its efficacy by deploying it in the model predictive control of a real quadruped robot.
Create account to get full access
Overview
- This paper focuses on improving the computational efficiency of model predictive control (MPC) by leveraging advancements in numerical optimization techniques.
- The authors introduce a parallel algorithm to solve the linear quadratic regulator (LQR) problem, which is a fundamental building block for computing steps in direct optimal control methods.
- The algorithm is designed to handle equality-constrained problems with implicit system dynamics and dual regularization, a characteristic found in advanced solvers like interior-point or augmented Lagrangian methods.
- The algorithm is implemented in the authors' nonlinear numerical optimal control library ALIGATOR and is shown to outperform previous serial formulations.
Plain English Explanation
Model predictive control (MPC) is a powerful technique used to optimize the behavior of complex systems, such as robots or power grids, in real-time. However, the computational demands of MPC can be substantial, as it often involves solving large-scale optimization problems with thousands of variables.
To address this challenge, the researchers in this paper have developed a new parallel algorithm for solving a key subproblem in MPC called the linear quadratic regulator (LQR) problem. The LQR problem is a fundamental building block for computing the steps needed to solve the overall optimization problem in MPC.
The authors' algorithm is designed to handle the specific challenges of MPC problems, such as the presence of implicit system dynamics and dual regularization, which are common in advanced optimization solvers. By leveraging a block elimination technique to rewrite the LQR recursion, the authors were able to enhance the efficiency of the serial algorithm and then generalize it to handle parametric problems.
This extension allows the algorithm to split decision variables and solve multiple subproblems concurrently, which can significantly improve the computational performance of the overall MPC system. The authors have implemented their algorithm in their ALIGATOR library and have validated its effectiveness by deploying it in the model predictive control of a real quadruped robot.
Technical Explanation
The paper introduces a parallel algorithm designed for solving an LQR problem with dual regularization, which is a characteristic found in advanced interior-point or augmented Lagrangian solvers for numerical optimal control. The authors leverage a rewriting of the LQR recursion through block elimination to first enhance the efficiency of the serial algorithm, and then subsequently generalize it to handle parametric problems.
This extension enables the algorithm to split decision variables and solve multiple subproblems concurrently, which can significantly improve the computational performance of the overall MPC system. The authors have implemented their algorithm in the ALIGATOR library and have validated its efficacy by deploying it in the model predictive control of a real quadruped robot.
The paper builds upon the authors' prior work on augmented Lagrangian methods for numerical optimal control with implicit dynamics and constraints.
Critical Analysis
The paper presents a compelling approach to improving the computational efficiency of MPC by addressing the fundamental LQR subproblem. The authors' use of block elimination to rewrite the LQR recursion and their subsequent generalization to handle parametric problems are noteworthy contributions.
However, the paper does not provide a detailed analysis of the limitations or potential drawbacks of the proposed algorithm. For instance, it would be helpful to understand the specific problem sizes and system complexities for which the parallel algorithm outperforms the serial formulation, as well as any trade-offs in terms of memory usage or implementation complexity.
Additionally, the paper could have delved deeper into the implications of the algorithm's ability to split decision variables and solve multiple subproblems concurrently. While this feature is highlighted as a key advantage, the paper does not explore how it might enable the algorithm to tackle even larger-scale MPC problems or how it might be extended to handle more complex problem structures.
Overall, the paper makes a valuable contribution to the field of numerical optimal control, but further research and analysis could help to fully elucidate the strengths, limitations, and broader applications of the proposed algorithm.
Conclusion
This paper presents a novel parallel algorithm for solving the linear quadratic regulator (LQR) problem, a fundamental building block in model predictive control (MPC). By leveraging a rewriting of the LQR recursion through block elimination, the authors have enhanced the efficiency of the serial algorithm and generalized it to handle parametric problems.
The key innovation of the algorithm is its ability to split decision variables and solve multiple subproblems concurrently, which can significantly improve the computational performance of MPC systems. The authors have implemented the algorithm in their ALIGATOR library and have demonstrated its effectiveness in the model predictive control of a real quadruped robot.
The research in this paper represents an important step forward in addressing the computational challenges of MPC, which is a critical technology for optimizing the behavior of complex systems in real-time. As MPC continues to be adopted in a wide range of applications, from robotics to energy systems, the advancements presented in this paper could have far-reaching implications for the field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌀
Primal-Dual iLQR
Jo~ao Sousa-Pinto, Dominique Orban
0
0
We introduce a new algorithm for solving unconstrained discrete-time optimal control problems. Our method follows a direct multiple shooting approach, and consists of applying the SQP method together with an $ell_2$ augmented Lagrangian primal-dual merit function. We use the LQR algorithm to efficiently solve the primal-dual Newton-KKT system. As our algorithm is a specialization of NPSQP, it inherits its generic properties, including global convergence, fast local convergence, and the lack of need for second order corrections or dimension expansions, improving on existing direct multiple shooting approaches such as acados, ALTRO, GNMS, FATROP, and FDDP. As our algorithm avoids sequential rollouts of the nonlinear dynamics, it can be combined with (Sarkka and Garc'ia-Fern'andez, 2023) to run in $O(log(N))$ parallel time per iteration (where $N$ is the number of stages), as well as $O(1)$ parallel time per line search iteration. Therefore, this paper provides a practical, theoretically sound, and highly parallelizable (for example, with a GPU) method for solving nonlinear discrete-time optimal control problems.
4/11/2024

Accelerated Optimization Landscape of Linear-Quadratic Regulator
Lechen Feng, Yuan-Hua Ni
0
0
Linear-quadratic regulator (LQR) is a landmark problem in the field of optimal control, which is the concern of this paper. Generally, LQR is classified into state-feedback LQR (SLQR) and output-feedback LQR (OLQR) based on whether the full state is obtained. It has been suggested in existing literature that both SLQR and OLQR could be viewed as textit{constrained nonconvex matrix optimization} problems in which the only variable to be optimized is the feedback gain matrix. In this paper, we introduce a first-order accelerated optimization framework of handling the LQR problem, and give its convergence analysis for the cases of SLQR and OLQR, respectively. Specifically, a Lipschiz Hessian property of LQR performance criterion is presented, which turns out to be a crucial property for the application of modern optimization techniques. For the SLQR problem, a continuous-time hybrid dynamic system is introduced, whose solution trajectory is shown to converge exponentially to the optimal feedback gain with Nesterov-optimal order $1-frac{1}{sqrt{kappa}}$ ($kappa$ the condition number). Then, the symplectic Euler scheme is utilized to discretize the hybrid dynamic system, and a Nesterov-type method with a restarting rule is proposed that preserves the continuous-time convergence rate, i.e., the discretized algorithm admits the Nesterov-optimal convergence order. For the OLQR problem, a Hessian-free accelerated framework is proposed, which is a two-procedure method consisting of semiconvex function optimization and negative curvature exploitation. In a time $mathcal{O}(epsilon^{-7/4}log(1/epsilon))$, the method can find an $epsilon$-stationary point of the performance criterion; this entails that the method improves upon the $mathcal{O}(epsilon^{-2})$ complexity of vanilla gradient descent. Moreover, our method provides the second-order guarantee of stationary point.
4/16/2024
Neuromorphic quadratic programming for efficient and scalable model predictive control
Ashish Rao Mangalore, Gabriel Andres Fonseca Guerra, Sumedh R. Risbud, Philipp Stratmann, Andreas Wild
0
0
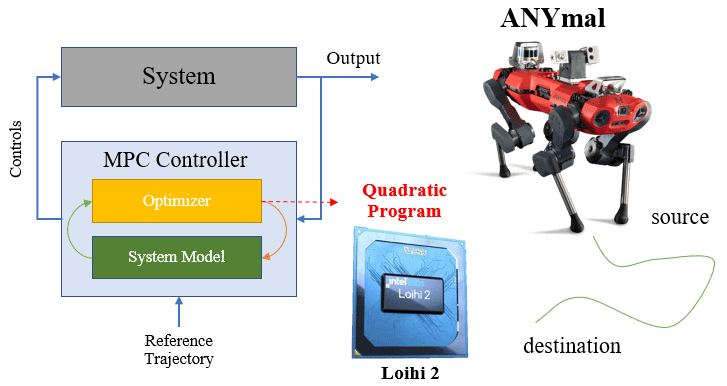
Applications in robotics or other size-, weight- and power-constrained autonomous systems at the edge often require real-time and low-energy solutions to large optimization problems. Event-based and memory-integrated neuromorphic architectures promise to solve such optimization problems with superior energy efficiency and performance compared to conventional von Neumann architectures. Here, we present a method to solve convex continuous optimization problems with quadratic cost functions and linear constraints on Intel's scalable neuromorphic research chip Loihi 2. When applied to model predictive control (MPC) problems for the quadruped robotic platform ANYmal, this method achieves over two orders of magnitude reduction in combined energy-delay product compared to the state-of-the-art solver, OSQP, on (edge) CPUs and GPUs with solution times under ten milliseconds for various problem sizes. These results demonstrate the benefit of non-von-Neumann architectures for robotic control applications.
6/21/2024
Efficient model predictive control for nonlinear systems modelled by deep neural networks
Jianglin Lan
0
0
This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
5/20/2024