A New 10-mg SMA-Based Fast Bimorph Actuator for Microrobotics

0
📊
Sign in to get full access
Overview
- Presents a new millimeter-scale bimorph actuator for microrobotic applications
- Actuator is driven by feedforward controlled shape-memory alloy (SMA) wires
- Weighs 10 mg, measures 14 mm in length, and occupies 4.8 mm3 volume
- Lightest and smallest fully functional SMA-based bimorph actuator for microrobotics
- Operational bandwidth is around 20 Hz
- Unimorph and bimorph maximum low-frequency displacement outputs are around 3.5 and 7 mm, respectively
- Developed the Fish-&-Ribbon-Inspired Small Swimming Harmonic roBot (FRISSHBot) to demonstrate the actuator's functionality and suitability for microrobotics
Plain English Explanation
The researchers have created a tiny, lightweight actuator that can be used to power small robotic devices. The actuator is based on shape-memory alloy (SMA) wires, which can change shape when heated. It weighs just 10 milligrams, measures 14 millimeters long, and takes up a volume of less than 5 cubic millimeters, making it the smallest and lightest of its kind.
The actuator can move quickly, with a maximum operating frequency of around 20 Hz. When it moves, it can generate displacements of up to 3.5 millimeters in a single direction, or up to 7 millimeters when configured as a bimorph (two actuators working together).
To demonstrate the capabilities of this tiny actuator, the researchers developed a small robotic fish called the Fish-&-Ribbon-Inspired Small Swimming Harmonic roBot (FRISSHBot). This robot, which weighs just 30 milligrams and measures 34 millimeters long, can swim at speeds of up to 3.06 millimeters per second by using the fluid-structure interaction between its flapping motion and the surrounding water.
Technical Explanation
The researchers present a new millimeter-scale bimorph actuator driven by feedforward controlled shape-memory alloy (SMA) wires. The device weighs 10 mg, measures 14 mm in length, and occupies a volume of 4.8 mm3, making it the lightest and smallest fully functional SMA-based bimorph actuator for microrobotics developed to date.
The actuator's operational bandwidth is on the order of 20 Hz, and the unimorph and bimorph maximum low-frequency displacement outputs are on the order of 3.5 and 7 mm, respectively. The researchers tested and demonstrated the functionality and suitability of the actuator for microrobotics by developing the Fish-&-Ribbon-Inspired Small Swimming Harmonic roBot (FRISSHBot). This robot, loosely inspired by carangiformes, leverages fluid-structure interaction (FSI) phenomena to propel itself forward. The FRISSHBot weighs 30 mg, measures 34 mm in length, operates at frequencies of up to 4 Hz, and swims at speeds of up to 3.06 mm/s (0.09 Bl/s), making it the lightest and smallest swimmer with onboard actuation developed to date.
Critical Analysis
The paper provides a detailed technical description of the new SMA-based bimorph actuator and its application in the development of the FRISSHBot microrobot. The researchers have addressed the key limitations of existing SMA-based actuators, such as size and weight, by developing a highly miniaturized and lightweight device.
One potential limitation mentioned in the paper is the relatively low operational bandwidth of the actuator, which may limit its ability to perform high-speed maneuvers. Additionally, the researchers note that the performance of the FRISSHBot is primarily limited by the low-frequency operation of the SMA-based actuation system.
Further research could explore ways to improve the actuator's bandwidth and explore alternative actuation mechanisms, such as magnetic soft actuators, to enable higher-frequency and more dynamic microrobotic movements.
Conclusion
The presented SMA-based bimorph actuator and its application in the development of the FRISSHBot microrobot represent a significant step forward in the field of microrobotics. The miniaturized and lightweight nature of the actuator opens up new possibilities for the design and deployment of small-scale robotic systems, particularly in areas such as biomedical engineering and environmental monitoring. While the current limitations of the actuator's bandwidth and the FRISSHBot's low-frequency operation need to be addressed, the research showcases the potential of SMA-based actuation and fluid-structure interaction for enabling the next generation of submersible microrobots.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
A New 10-mg SMA-Based Fast Bimorph Actuator for Microrobotics
Conor K. Trygstad, Elijah K. Blankenship, Nestor O. Perez-Arancibia
We present a new millimeter-scale bimorph actuator for microrobotic applications, driven by feedforward controlled shape-memory alloy (SMA) wires. The device weighs 10 mg, measures 14 mm in length, and occupies a volume of 4.8 mm3, which makes it the lightest and smallest fully functional SMA-based bimorph actuator for microrobotics developed to date. The experimentally measured operational bandwidth is on the order of 20 Hz, and the unimorph and bimorph maximum low-frequency displacement outputs are on the order of 3.5 and 7 mm, respectively. To test and demonstrate the functionality and suitability of the actuator for microrobotics, we developed the Fish-&-Ribbon-Inspired Small Swimming Harmonic roBot (FRISSHBot). Loosely inspired by carangiformes, the FRISSHBot leverages fluid-structure interaction (FSI) phenomena to propel itself forward, weighs 30 mg, measures 34 mm in length, operates at frequencies of up to 4 Hz, and swims at speeds of up to 3.06 mm/s (0.09 Bl/s). This robot is the lightest and smallest swimmer with onboard actuation developed to date.
Read more9/30/2024
↗️
0
Progress Towards Submersible Microrobots: A Novel 13-mg Low-Power SMA-Based Actuator for Underwater Propulsion
Cody R. Longwell, Conor K. Trygstad, Francisco M. F. R. Goncalves, Ke Xu, Nestor O. Perez-Arancibia
We introduce a new low-power 13-mg microactuator driven by shape-memory alloy (SMA) wires for underwater operation. The development of this device was motivated by the recent creation of microswimmers such as the FRISHBot, WaterStrider, VLEIBot, VLEIBot+, and VLEIBot++. The first four of these robots, ranging from 30 to 90 mg, function tethered to an electrical power supply while the last platform is an 810-mg fully autonomous system. These five robots are driven by dry SMA-based microactuators first developed for microrobotic crawlers such as the SMALLBug and SMARTI. As shown in this abstract, dry SMA-based actuators do not operate efficiently under water due to high heat-transfer rates in this medium; for example, the actuators that drive the VLEIBot++ require about 40 mW of average power at 1 Hz in dry air while requiring about 900 mW of average power at 1 Hz in water. In contrast, the microactuator presented in this abstract consumes about 150 mW of average power at 1 Hz in both dry air and water; additionally, it can be excited directly using an onboard battery through simple power electronics implemented on a custom-built printed circuit board (PCB). This technological breakthrough was enabled by the integration of a soft structure that encapsulates the SMA wires that drive the actuator in order to passively control the rates of heat transfer. The results presented here represent preliminary, yet compelling, experimental evidence that the proposed actuation approach will enable the development of fully autonomous and controllable submersible microswimmers. To accomplish this objective, we will evolve the current version of the VLEIBot++ and introduce new bioinspired underwater propulsion mechanisms.
Read more9/30/2024

0
VLEIBot: A New 45-mg Swimming Microrobot Driven by a Bioinspired Anguilliform Propulsor
Elijah K. Blankenship, Conor K. Trygstad, Francisco M. F. R. Gonc{c}alves, N'estor O. P'erez-Arancibia
This paper presents the VLEIBot^* (Very Little Eel-Inspired roBot), a 45-mg/23-mm^3 microrobotic swimmer that is propelled by a bioinspired anguilliform propulsor. The propulsor is excited by a single 6-mg high-work-density (HWD) microactuator and undulates periodically due to wave propagation phenomena generated by fluid-structure interaction (FSI) during swimming. The microactuator is composed of a carbon-fiber beam, which functions as a leaf spring, and shape-memory alloy (SMA) wires, which deform cyclically when excited periodically using Joule heating. The VLEIBot can swim at speeds as high as 15.1mm * s^{-1} (0.33 Bl * s^{-1}}) when driven with a heuristically-optimized propulsor. To improve maneuverability, we evolved the VLEIBot design into the 90-mg/47-mm^3 VLEIBot^+, which is driven by two propulsors and fully controllable in the two-dimensional (2D) space. The VLEIBot^+ can swim at speeds as high as 16.1mm * s^{-1} (0.35 Bl * s^{-1}), when driven with heuristically-optimized propulsors, and achieves turning rates as high as 0.28 rad * s^{-1}, when tracking path references. The measured root-mean-square (RMS) values of the tracking errors are as low as 4 mm.
Read more9/30/2024
0
Fin ray-inspired, Origami, Small Scale Actuator for Fin Manipulation in Aquatic Bioinspired Robots
Minh Vu, Revathy Ravuri, Angus Muir, Charles Mackie, Andrew Weightman, Simon Watson, Tim J. Echtermeyer
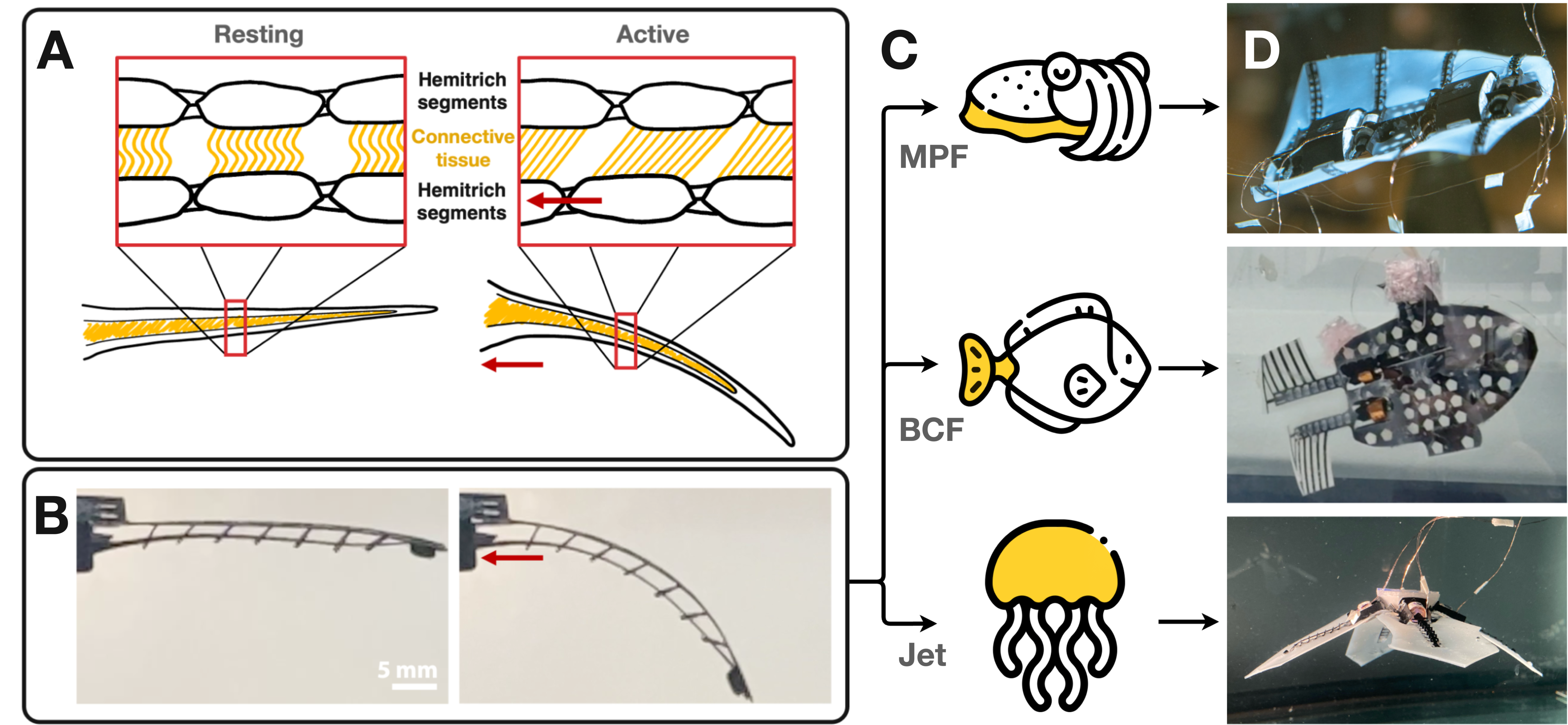
Fish locomotion is enabled by fin rays-actively deformable boney rods, which manipulate the fin to facilitate complex interaction with surrounding water and enable propulsion. Replicating the performance and kinematics of the biological fin ray from an engineering perspective is a challenging task and has not been realised thus far. This work introduces a prototype of a fin ray-inspired origami electromagnetic tendon-driven (FOLD) actuator, designed to emulate the functional dynamics of fish fin rays. Constructed in minutes using origami/kirigami and paper joinery techniques from flat laser-cut polypropylene film, this actuator is low-cost at {pounds}0.80 ($1), simple to assemble, and durable for over one million cycles. We leverage its small size to embed eight into two fin membranes of a 135 mm long cuttlefish robot capable of four degrees of freedom swimming. We present an extensive kinematic and swimming parametric study with 1015 data points from 7.6 hours of video, which has been used to determine optimal kinematic parameters and validate theoretical constants observed in aquatic animals. Notably, the study explores the nuanced interplay between undulation patterns, power distribution, and locomotion efficiency, underscoring the potential of the actuator as a model system for the investigation of energy-efficient propulsion and control of bioinspired systems. The versatility of the actuator is further demonstrated by its integration into a fish and a jellyfish.
Read more7/25/2024