A New Self-Alignment Method without Solving Wahba Problem for SINS in Autonomous Vehicles

0
🏋️
Sign in to get full access
Overview
- This paper presents a new self-alignment method for strapdown inertial navigation systems (SINS) under swaying conditions.
- The proposed method can determine the latitude and attitude simultaneously without relying on external aids or solving the Wahba problem.
- The method constructs a dyadic tensor from observation and reference vectors, which allows all equations to be accumulated into a single equation.
- This enables the latitude variable to be extracted and solved based on the same eigenvalues, while the attitude is obtained through eigenvalue decomposition.
- Simulation and experimental tests demonstrate the effectiveness of the proposed method, with improved convergence speed and stability compared to the TRIAD method, and comparable alignment accuracy to the OBA method with or without latitude information.
Plain English Explanation
Self-alignment in inertial navigation systems is crucial for providing accurate initial state information, such as the vehicle's attitude and position, without relying on external aids. This is particularly important in situations where the position is not needed or available, like in attitude heading reference systems.
The paper introduces a new self-alignment method that can determine the latitude and attitude simultaneously, even when the vehicle is swaying or moving unpredictably. Instead of solving the complex Wahba problem, the researchers use a more straightforward approach. They construct a special mathematical object called a "dyadic tensor" from the observation and reference vectors, which allows them to combine all the relevant equations into a single equation.
From this single equation, they can extract the latitude variable and solve for it using the same eigenvalues on both sides of the equation. The attitude is then obtained through a standard eigenvalue decomposition process. This novel approach eliminates the need to solve the Wahba problem, which is typically used in inertial-visual alignment methods.
The researchers' simulations and experiments show that their method outperforms the TRIAD algorithm in terms of convergence speed and stability, and matches the accuracy of the OBA method, even when latitude information is not available. This makes the proposed self-alignment technique particularly useful for autonomous vehicle applications where inertial measurement units and GPS are used for navigation and localization.
Technical Explanation
The paper presents a new self-alignment method for strapdown inertial navigation systems (SINS) that can determine the latitude and attitude simultaneously under swaying conditions. Unlike existing methods that rely on solving the Wahba problem, the proposed approach constructs a dyadic tensor from the observation and reference vectors, allowing all equations related to these vectors to be accumulated into a single equation.
By extracting the latitude variable from this single equation based on the same eigenvalues on both sides, and then obtaining the attitude through eigenvalue decomposition, the method avoids the need to solve the Wahba problem. Simulation and experimental tests demonstrate that the proposed self-alignment method outperforms the TRIAD algorithm in terms of convergence speed and stability, and achieves comparable alignment accuracy to the OBA method, with or without latitude information.
The key technical contributions of the paper include:
- Constructing a dyadic tensor from observation and reference vectors to consolidate all relevant equations into a single equation.
- Extracting the latitude variable from the single equation using the same eigenvalues on both sides, without solving the Wahba problem.
- Obtaining the attitude through eigenvalue decomposition of the consolidated equation.
- Validating the effectiveness of the proposed self-alignment method through simulation and experimental tests, showing improved performance compared to TRIAD and comparable accuracy to OBA.
Critical Analysis
The paper presents a novel and promising self-alignment method for SINS that addresses some of the limitations of existing approaches. The key strength of the proposed method is its ability to determine both latitude and attitude simultaneously without relying on external aids or solving the Wahba problem, which can be computationally intensive.
However, the paper does not provide a thorough analysis of the method's robustness to various environmental conditions or sensor noise levels. Additionally, the experimental validation is limited, and the authors do not discuss the potential challenges or limitations of the method in real-world applications.
Further research could explore the method's performance under more diverse and challenging scenarios, such as high-dynamic motions, sensor failures, or GPS outages. Comparisons with other self-alignment techniques, such as QUEST or EKF-based methods, could also help provide a more comprehensive evaluation of the proposed approach.
Overall, the paper presents an intriguing self-alignment method that could be valuable for autonomous vehicle applications, particularly in scenarios where position information is not readily available. Further research and real-world validation would be needed to fully assess the method's capabilities and practical implications.
Conclusion
This paper introduces a new self-alignment method for strapdown inertial navigation systems that can determine latitude and attitude simultaneously under swaying conditions. By constructing a dyadic tensor from observation and reference vectors, the method avoids the need to solve the computationally intensive Wahba problem, which is typically used in inertial-visual alignment approaches.
The proposed approach demonstrates improved convergence speed and stability compared to the TRIAD algorithm, while achieving comparable alignment accuracy to the OBA method, even in the absence of latitude information. This makes the method particularly useful for autonomous vehicle applications that rely on inertial measurement units and GPS for navigation and localization.
While the paper provides promising initial results, further research is needed to fully assess the method's robustness and applicability in diverse real-world scenarios. Nonetheless, the novel approach presented in this work represents a valuable contribution to the field of inertial navigation system alignment and could have important implications for the development of autonomous vehicle technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
0
A New Self-Alignment Method without Solving Wahba Problem for SINS in Autonomous Vehicles
Hongliang Zhang, Yilan Zhou, Lei Wang, Tengchao Huang
Initial alignment is one of the key technologies in strapdown inertial navigation system (SINS) to provide initial state information for vehicle attitude and navigation. For some situations, such as the attitude heading reference system, the position is not necessarily required or even available, then the self-alignment that does not rely on any external aid becomes very necessary. This study presents a new self-alignment method under swaying conditions, which can determine the latitude and attitude simultaneously by utilizing all observation vectors without solving the Wahba problem, and it is different from the existing methods. By constructing the dyadic tensor of each observation and reference vector itself, all equations related to observation and reference vectors are accumulated into one equation, where the latitude variable is extracted and solved according to the same eigenvalues of similar matrices on both sides of the equation, meanwhile the attitude is obtained by eigenvalue decomposition. Simulation and experiment tests verify the effectiveness of the proposed methods, and the alignment result is better than TRIAD in convergence speed and stability and comparable with OBA method in alignment accuracy with or without latitude. It is useful for guiding the design of initial alignment in autonomous vehicle applications.
Read more5/3/2024
0
Robust Long-Range Perception Against Sensor Misalignment in Autonomous Vehicles
Zi-Xiang Xia, Sudeep Fadadu, Yi Shi, Louis Foucard
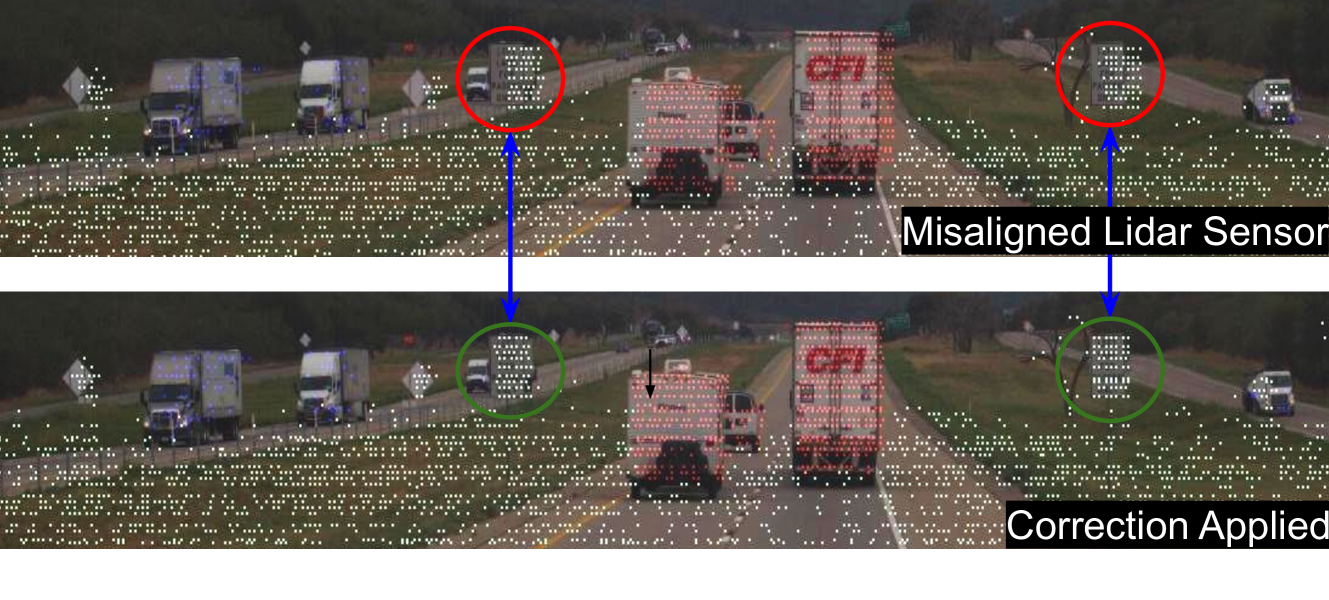
Advances in machine learning algorithms for sensor fusion have significantly improved the detection and prediction of other road users, thereby enhancing safety. However, even a small angular displacement in the sensor's placement can cause significant degradation in output, especially at long range. In this paper, we demonstrate a simple yet generic and efficient multi-task learning approach that not only detects misalignment between different sensor modalities but is also robust against them for long-range perception. Along with the amount of misalignment, our method also predicts calibrated uncertainty, which can be useful for filtering and fusing predicted misalignment values over time. In addition, we show that the predicted misalignment parameters can be used for self-correcting input sensor data, further improving the perception performance under sensor misalignment.
Read more9/12/2024
➖
0
Equivariant Symmetries for Aided Inertial Navigation
Alessandro Fornasier
Respecting the geometry of the underlying system and exploiting its symmetry have been driving concepts in deriving modern geometric filters for inertial navigation systems (INSs). Despite their success, the explicit treatment of inertial measurement unit (IMU) biases remains challenging, unveiling a gap in the current theory of filter design. In response to this gap, this dissertation builds upon the recent theory of equivariant systems to address and overcome the limitations in existing methodologies. The goal is to identify new symmetries of inertial navigation systems that include a geometric treatment of IMU biases and exploit them to design filtering algorithms that outperform state-of-the-art solutions in terms of accuracy, convergence rate, robustness, and consistency. This dissertation leverages the semi-direct product rule and introduces the tangent group for inertial navigation systems as the first equivariant symmetry that properly accounts for IMU biases. Based on that, we show that it is possible to derive an equivariant filter (EqF) algorithm with autonomous navigation error dynamics. The resulting filter demonstrates superior to state-of-the-art solutions. Through a comprehensive analysis of various symmetries of inertial navigation systems, we formalized the concept that every filter can be derived as an EqF with a specific choice of symmetry. This underlines the fundamental role of symmetry in determining filter performance. This dissertation advances the understanding of equivariant symmetries in the context of inertial navigation systems and serves as a basis for the next generation of equivariant estimators, marking a significant leap toward more reliable navigation solutions.
Read more7/22/2024

0
A re-calibration method for object detection with multi-modal alignment bias in autonomous driving
Zhihang Song, Lihui Peng, Jianming Hu, Danya Yao, Yi Zhang
Multi-modal object detection in autonomous driving has achieved great breakthroughs due to the usage of fusing complementary information from different sensors. The calibration in fusion between sensors such as LiDAR and camera is always supposed to be precise in previous work. However, in reality, calibration matrices are fixed when the vehicles leave the factory, but vibration, bumps, and data lags may cause calibration bias. As the research on the calibration influence on fusion detection performance is relatively few, flexible calibration dependency multi-sensor detection method has always been attractive. In this paper, we conducted experiments on SOTA detection method EPNet++ and proved slight bias on calibration can reduce the performance seriously. We also proposed a re-calibration model based on semantic segmentation which can be combined with a detection algorithm to improve the performance and robustness of multi-modal calibration bias.
Read more5/28/2024