NOD-TAMP: Generalizable Long-Horizon Planning with Neural Object Descriptors
2311.01530
0
0
🧠
Abstract
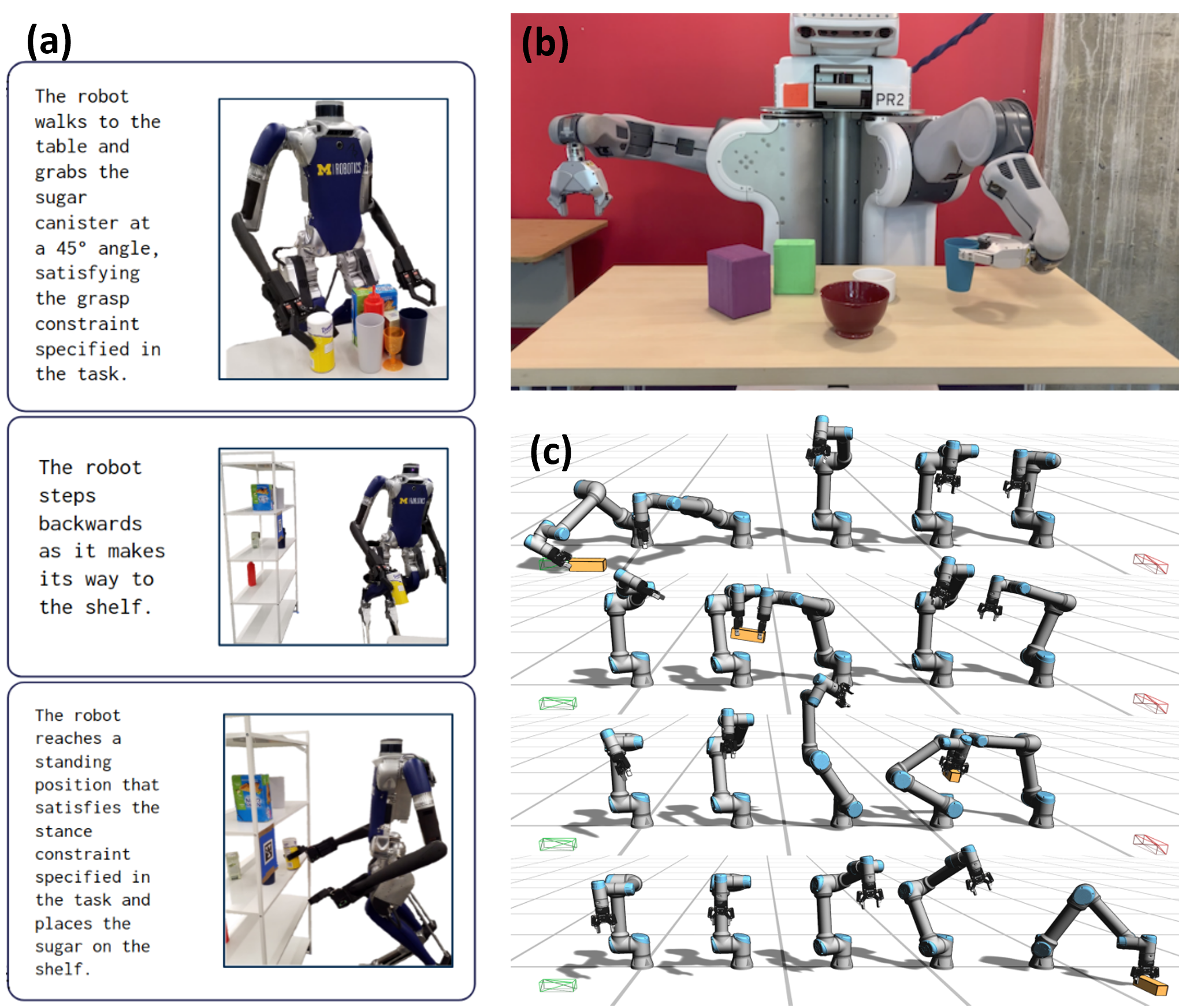
Solving complex manipulation tasks in household and factory settings remains challenging due to long-horizon reasoning, fine-grained interactions, and broad object and scene diversity. Learning skills from demonstrations can be an effective strategy, but such methods often have limited generalizability beyond training data and struggle to solve long-horizon tasks. To overcome this, we propose to synergistically combine two paradigms: Neural Object Descriptors (NODs) that produce generalizable object-centric features and Task and Motion Planning (TAMP) frameworks that chain short-horizon skills to solve multi-step tasks. We introduce NOD-TAMP, a TAMP-based framework that extracts short manipulation trajectories from a handful of human demonstrations, adapts these trajectories using NOD features, and composes them to solve broad long-horizon, contact-rich tasks. NOD-TAMP solves existing manipulation benchmarks with a handful of demonstrations and significantly outperforms prior NOD-based approaches on new tabletop manipulation tasks that require diverse generalization. Finally, we deploy NOD-TAMP on a number of real-world tasks, including tool-use and high-precision insertion. For more details, please visit https://sites.google.com/view/nod-tamp/.
Create account to get full access
Overview
- Solving complex manipulation tasks in household and factory settings remains challenging due to long-horizon reasoning, fine-grained interactions, and broad object and scene diversity.
- Learning skills from demonstrations can be an effective strategy, but such methods often have limited generalizability beyond training data and struggle to solve long-horizon tasks.
- To overcome this, the researchers propose to combine two paradigms: Neural Object Descriptors (NODs) that produce generalizable object-centric features and Task and Motion Planning (TAMP) frameworks that chain short-horizon skills to solve multi-step tasks.
Plain English Explanation
The paper presents a new approach to solving complex manipulation tasks, such as those found in household and factory settings. These tasks can be challenging because they often require long-term planning, fine control of object interactions, and the ability to handle a wide variety of objects and scenes.
One common strategy is to learn manipulation skills by observing human demonstrations. However, these methods can struggle to generalize beyond the specific situations they were trained on, and they may have difficulty solving tasks that require multiple steps or long-term planning.
To address these limitations, the researchers combined two key technologies:
-
Neural Object Descriptors (NODs): These are AI models that can extract generalizable, object-centric features from visual data. This allows the system to better understand and adapt to new objects and scenes.
-
Task and Motion Planning (TAMP): This is a framework that can break down complex tasks into a sequence of short-term actions, or "skills," and then plan how to chain those skills together to solve the overall task.
By combining NODs and TAMP, the researchers created a system called NOD-TAMP that can solve a wide range of long-horizon, contact-rich manipulation tasks using just a few human demonstrations. This approach outperforms previous methods that relied solely on NODs, and the researchers have successfully deployed it in real-world tasks like tool use and high-precision insertion.
Technical Explanation
The core idea behind NOD-TAMP is to synergistically combine two powerful paradigms: Neural Object Descriptors (NODs) and Task and Motion Planning (TAMP).
NODs are AI models that can extract generalizable, object-centric features from visual data. These features allow the system to better understand and adapt to new objects and scenes, beyond just the specific training data. Previous work has shown that NODs can be effective for manipulation tasks, but they can struggle with long-horizon reasoning and the composition of short-term skills.
TAMP frameworks, on the other hand, are designed to chain together short-term manipulation skills to solve complex, multi-step tasks. By breaking down a task into a sequence of actions, TAMP can handle long-horizon reasoning and the coordination of fine-grained interactions. However, TAMP approaches often rely on manually specified skills or trajectories, which can limit their generalizability.
The key insight of NOD-TAMP is to leverage NODs to adapt and generalize the short-term manipulation skills extracted from human demonstrations, and then use TAMP to compose these skills to solve broad, long-horizon tasks. Specifically, the system:
- Extracts short manipulation trajectories from a small number of human demonstrations.
- Adapts these trajectories using the generalizable features produced by the NOD model.
- Composes the adapted trajectories using a TAMP framework to solve complex, multi-step tasks.
The researchers evaluate NOD-TAMP on both existing manipulation benchmarks and new, challenging tabletop tasks that require diverse generalization. They find that NOD-TAMP significantly outperforms prior NOD-based approaches, and they also demonstrate the system's ability to solve real-world tasks, such as tool use and high-precision insertion.
Critical Analysis
The researchers acknowledge several limitations and areas for future work. First, while NOD-TAMP can handle a wide range of manipulation tasks, it still relies on a small number of human demonstrations to extract the initial skill trajectories. Expanding the system to learn skills from richer, more diverse sources of data could further improve its generalization capabilities.
Additionally, the current implementation of NOD-TAMP focuses on single-arm manipulation tasks. Extending the framework to handle dual-arm coordination and more complex physical interactions could broaden its applicability to real-world settings. The researchers also mention the potential to incorporate COAST constraints and streams to further improve the system's ability to reason about long-horizon tasks.
Overall, the NOD-TAMP approach represents a promising step towards solving challenging, long-horizon manipulation tasks in diverse real-world environments. By combining the strengths of NODs and TAMP, the researchers have developed a framework that can leverage a small number of demonstrations to solve complex, multi-step manipulation problems. As the field of robotics and AI continues to advance, the insights and techniques presented in this paper could contribute to the development of more capable and versatile manipulation systems.
Conclusion
This paper presents a novel approach called NOD-TAMP that synergistically combines Neural Object Descriptors (NODs) and Task and Motion Planning (TAMP) to solve complex, long-horizon manipulation tasks. By extracting and adapting short-term manipulation skills from human demonstrations using NOD features, and then composing these skills using a TAMP framework, NOD-TAMP can solve a wide range of challenging tasks with just a few examples.
The key contributions of this work include:
- Demonstrating the benefits of combining NODs and TAMP to overcome the limitations of each individual approach.
- Developing a system that can solve complex, multi-step manipulation tasks using a small number of human demonstrations.
- Showing the system's ability to generalize to new, diverse tabletop manipulation tasks and real-world scenarios, such as tool use and high-precision insertion.
As robotics and AI continue to advance, the insights and techniques presented in this paper could help pave the way for more capable and versatile manipulation systems that can operate effectively in a wide range of household, industrial, and real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
A Survey of Optimization-based Task and Motion Planning: From Classical To Learning Approaches
Zhigen Zhao, Shuo Cheng, Yan Ding, Ziyi Zhou, Shiqi Zhang, Danfei Xu, Ye Zhao
0
0
Task and Motion Planning (TAMP) integrates high-level task planning and low-level motion planning to equip robots with the autonomy to effectively reason over long-horizon, dynamic tasks. Optimization-based TAMP focuses on hybrid optimization approaches that define goal conditions via objective functions and are capable of handling open-ended goals, robotic dynamics, and physical interaction between the robot and the environment. Therefore, optimization-based TAMP is particularly suited to solve highly complex, contact-rich locomotion and manipulation problems. This survey provides a comprehensive review on optimization-based TAMP, covering (i) planning domain representations, including action description languages and temporal logic, (ii) individual solution strategies for components of TAMP, including AI planning and trajectory optimization (TO), and (iii) the dynamic interplay between logic-based task planning and model-based TO. A particular focus of this survey is to highlight the algorithm structures to efficiently solve TAMP, especially hierarchical and distributed approaches. Additionally, the survey emphasizes the synergy between the classical methods and contemporary learning-based innovations such as large language models. Furthermore, the future research directions for TAMP is discussed in this survey, highlighting both algorithmic and application-specific challenges.
7/2/2024
Toward Holistic Planning and Control Optimization for Dual-Arm Rearrangement
Kai Gao, Zihe Ye, Duo Zhang, Baichuan Huang, Jingjin Yu
0
0
Long-horizon task and motion planning (TAMP) is notoriously difficult to solve, let alone optimally, due to the tight coupling between the interleaved (discrete) task and (continuous) motion planning phases, where each phase on its own is frequently an NP-hard or even PSPACE-hard computational challenge. In this study, we tackle the even more challenging goal of jointly optimizing task and motion plans for a real dual-arm system in which the two arms operate in close vicinity to solve highly constrained tabletop multi-object rearrangement problems. Toward that, we construct a tightly integrated planning and control optimization pipeline, Makespan-Optimized Dual-Arm Planner (MODAP) that combines novel sampling techniques for task planning with state-of-the-art trajectory optimization techniques. Compared to previous state-of-the-art, MODAP produces task and motion plans that better coordinate a dual-arm system, delivering significantly improved execution time improvements while simultaneously ensuring that the resulting time-parameterized trajectory conforms to specified acceleration and jerk limits.
4/11/2024
🤿
Factored Task and Motion Planning with Combined Optimization, Sampling and Learning
Joaquim Ortiz-Haro
0
0
In this thesis, we aim to improve the performance of TAMP algorithms from three complementary perspectives. First, we investigate the integration of discrete task planning with continuous trajectory optimization. Our main contribution is a conflict-based solver that automatically discovers why a task plan might fail when considering the constraints of the physical world. This information is then fed back into the task planner, resulting in an efficient, bidirectional, and intuitive interface between task and motion, capable of solving TAMP problems with multiple objects, robots, and tight physical constraints. In the second part, we first illustrate that, given the wide range of tasks and environments within TAMP, neither sampling nor optimization is superior in all settings. To combine the strengths of both approaches, we have designed meta-solvers for TAMP, adaptive solvers that automatically select which algorithms and computations to use and how to best decompose each problem to find a solution faster. In the third part, we combine deep learning architectures with model-based reasoning to accelerate computations within our TAMP solver. Specifically, we target infeasibility detection and nonlinear optimization, focusing on generalization, accuracy, compute time, and data efficiency. At the core of our contributions is a refined, factored representation of the trajectory optimization problems inside TAMP. This structure not only facilitates more efficient planning, encoding of geometric infeasibility, and meta-reasoning but also provides better generalization in neural architectures.
4/5/2024
👁️
Logic Dynamic Movement Primitives for Long-horizon Manipulation Tasks in Dynamic Environments
Yan Zhang, Teng Xue, Amirreza Razmjoo, Sylvain Calinon
0
0
Learning from Demonstration (LfD) stands as an efficient framework for imparting human-like skills to robots. Nevertheless, designing an LfD framework capable of seamlessly imitating, generalizing, and reacting to disturbances for long-horizon manipulation tasks in dynamic environments remains a challenge. To tackle this challenge, we present Logic Dynamic Movement Primitives (Logic-DMP), which combines Task and Motion Planning (TAMP) with an optimal control formulation of DMP, allowing us to incorporate motion-level via-point specifications and to handle task-level variations or disturbances in dynamic environments. We conduct a comparative analysis of our proposed approach against several baselines, evaluating its generalization ability and reactivity across three long-horizon manipulation tasks. Our experiment demonstrates the fast generalization and reactivity of Logic-DMP for handling task-level variants and disturbances in long-horizon manipulation tasks.
6/26/2024