Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning

0
Sign in to get full access
Overview
- The paper provides a guide on how to use the IEEEtran LaTeX templates.
- It covers the design, intent, and limitations of the templates.
- It also includes instructions on how to properly use the templates.
Plain English Explanation
The IEEEtran LaTeX templates are a set of pre-designed document styles that make it easier to format research papers for IEEE publications. These templates handle things like the proper spacing, font sizes, and overall layout, so authors don't have to worry about the formatting details and can focus on the content of their paper.
The templates are designed to meet the specific requirements of IEEE, which is a major professional organization for electrical and computer engineers. By using the IEEEtran templates, authors can ensure their paper will have the correct appearance and structure for submission to IEEE conferences and journals.
However, the templates do have some limitations. They may not be fully flexible or customizable, and authors still need to be careful to follow the templates' instructions to avoid formatting issues. Overall, the IEEEtran templates are a useful tool for researchers who need to publish in IEEE venues, but they require some understanding of how to use them properly.
Technical Explanation
The paper provides a detailed guide on the IEEEtran LaTeX templates, which are a set of document class files and supporting style files designed for formatting research papers according to IEEE publication requirements.
The templates are intended to handle the various formatting details, such as page layout, font sizes, and citation styles, so that authors can focus on the content of their paper rather than the specifics of the formatting.
The paper discusses the design goals of the templates, including providing a consistent and professional appearance for IEEE publications, as well as the limitations of the templates in terms of flexibility and customization.
It also provides instructions on how to properly use the IEEEtran templates, including information on the various document class options, the structure of the LaTeX code, and tips for troubleshooting common issues.
Critical Analysis
The paper provides a comprehensive overview of the IEEEtran LaTeX templates, highlighting both their strengths and limitations. While the templates are a valuable tool for ensuring the correct formatting of IEEE papers, the authors acknowledge that they may not be fully flexible or customizable to the needs of all authors.
One potential issue raised is the templates' reliance on specific LaTeX commands and structures, which may require authors to have a certain level of familiarity with the LaTeX typesetting system. This could be a barrier for some researchers who are more comfortable with other word processing tools.
Additionally, the paper notes that the templates may not be able to accommodate all the formatting requirements of IEEE, and authors may still need to manually adjust certain elements to meet the publication guidelines.
Overall, the paper provides a balanced and informative guide on the use of the IEEEtran templates, encouraging readers to think critically about the trade-offs involved in using pre-designed formatting tools versus more customized approaches.
Conclusion
The IEEEtran LaTeX templates are a valuable resource for researchers who need to publish their work in IEEE conferences and journals. By providing a consistent and professional-looking format, the templates can save authors time and effort in preparing their manuscripts.
However, the paper highlights the importance of understanding the templates' design, intent, and limitations in order to use them effectively. Authors should be aware of the templates' flexibility constraints and be prepared to make manual adjustments as needed to meet IEEE's specific formatting requirements.
By following the guidance provided in this paper, researchers can leverage the IEEEtran templates to streamline the publication process and focus on the content and quality of their work.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning
Ilyass Taouil, Lorenzo Amatucci, Majid Khadiv, Angela Dai, Victor Barasuol, Giulio Turrisi, Claudio Semini
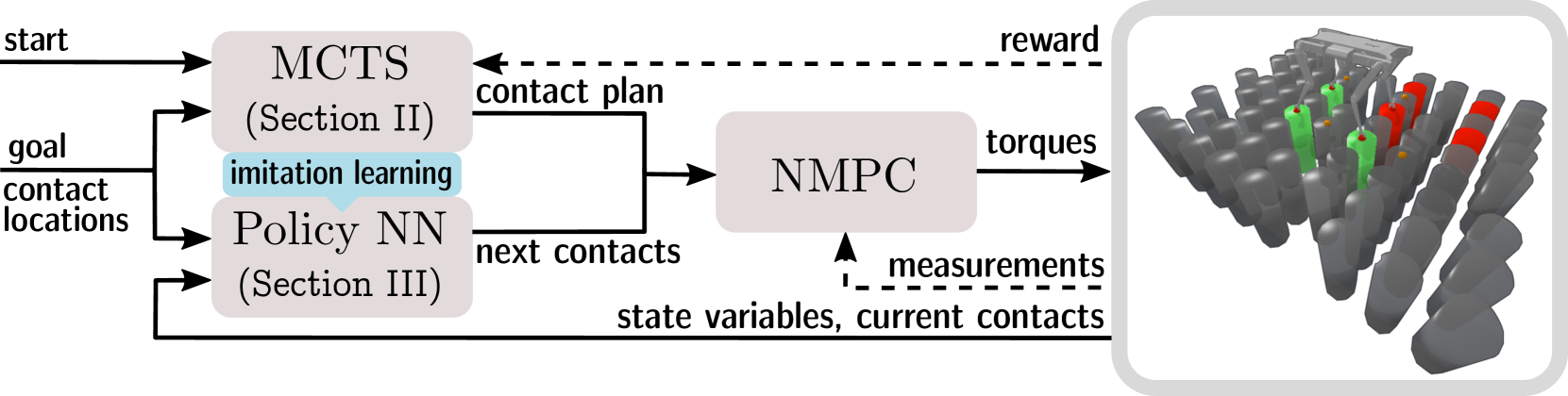
Legged robots are able to navigate complex terrains by continuously interacting with the environment through careful selection of contact sequences and timings. However, the combinatorial nature behind contact planning hinders the applicability of such optimization problems on hardware. In this work, we present a novel approach that optimizes gait sequences and respective timings for legged robots in the context of optimization-based controllers through the use of sampling-based methods and supervised learning techniques. We propose to bootstrap the search by learning an optimal value function in order to speed-up the gait planning procedure making it applicable in real-time. To validate our proposed method, we showcase its performance both in simulation and on hardware using a 22 kg electric quadruped robot. The method is assessed on different terrains, under external perturbations, and in comparison to a standard control approach where the gait sequence is fixed a priori.
Read more8/15/2024
0
Diffusion-based learning of contact plans for agile locomotion
Victor Dh'edin, Adithya Kumar Chinnakkonda Ravi, Armand Jordana, Huaijiang Zhu, Avadesh Meduri, Ludovic Righetti, Bernhard Scholkopf, Majid Khadiv
Legged robots have become capable of performing highly dynamic maneuvers in the past few years. However, agile locomotion in highly constrained environments such as stepping stones is still a challenge. In this paper, we propose a combination of model-based control, search, and learning to design efficient control policies for agile locomotion on stepping stones. In our framework, we use nonlinear model predictive control (NMPC) to generate whole-body motions for a given contact plan. To efficiently search for an optimal contact plan, we propose to use Monte Carlo tree search (MCTS). While the combination of MCTS and NMPC can quickly find a feasible plan for a given environment (a few seconds), it is not yet suitable to be used as a reactive policy. Hence, we generate a dataset for optimal goal-conditioned policy for a given scene and learn it through supervised learning. In particular, we leverage the power of diffusion models in handling multi-modality in the dataset. We test our proposed framework on a scenario where our quadruped robot Solo12 successfully jumps to different goals in a highly constrained environment.
Read more7/17/2024

0
Optimal Gait Design for a Soft Quadruped Robot via Multi-fidelity Bayesian Optimization
Kaige Tan, Xuezhi Niu, Qinglei Ji, Lei Feng, Martin Torngren
This study focuses on the locomotion capability improvement in a tendon-driven soft quadruped robot through an online adaptive learning approach. Leveraging the inverse kinematics model of the soft quadruped robot, we employ a central pattern generator to design a parametric gait pattern, and use Bayesian optimization (BO) to find the optimal parameters. Further, to address the challenges of modeling discrepancies, we implement a multi-fidelity BO approach, combining data from both simulation and physical experiments throughout training and optimization. This strategy enables the adaptive refinement of the gait pattern and ensures a smooth transition from simulation to real-world deployment for the controller. Moreover, we integrate a computational task off-loading architecture by edge computing, which reduces the onboard computational and memory overhead, to improve real-time control performance and facilitate an effective online learning process. The proposed approach successfully achieves optimal walking gait design for physical deployment with high efficiency, effectively addressing challenges related to the reality gap in soft robotics.
Read more6/12/2024
0
Optimal Gait Control for a Tendon-driven Soft Quadruped Robot by Model-based Reinforcement Learning
Xuezhi Niu, Kaige Tan, Lei Feng
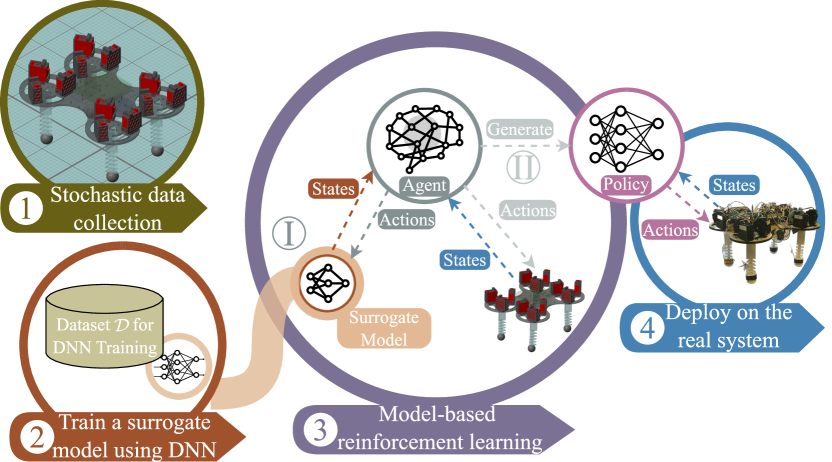
This study presents an innovative approach to optimal gait control for a soft quadruped robot enabled by four Compressible Tendon-driven Soft Actuators (CTSAs). Improving our previous studies of using model-free reinforcement learning for gait control, we employ model-based reinforcement learning (MBRL) to further enhance the performance of the gait controller. Compared to rigid robots, the proposed soft quadruped robot has better safety, less weight, and a simpler mechanism for fabrication and control. However, the primary challenge lies in developing sophisticated control algorithms to attain optimal gait control for fast and stable locomotion. The research employs a multi-stage methodology, including state space restriction, data-driven model training, and reinforcement learning algorithm development. Compared to benchmark methods, the proposed MBRL algorithm, combined with post-training, significantly improves the efficiency and performance of gait control policies. The developed policy is both robust and adaptable to the robot's deformable morphology. The study concludes by highlighting the practical applicability of these findings in real-world scenarios.
Read more6/12/2024