Nonlinear integral extension of PID control with improved convergence of perturbed second-order dynamic systems

0
Sign in to get full access
Overview
- The paper proposes a nonlinear integral extension of the Proportional-Integral-Derivative (PID) control system, which aims to improve the convergence of perturbed second-order dynamic systems.
- The key idea is to introduce a nonlinear integral term to the standard PID controller, which can better handle system perturbations and uncertainties.
- The authors demonstrate the effectiveness of their approach through theoretical analysis and simulations on a second-order system with parameter variations.
Plain English Explanation
The researchers have developed an improved version of a commonly used control system called PID (Proportional-Integral-Derivative) control. PID control is widely used to regulate the behavior of various systems, such as temperature, speed, or position, by adjusting the control inputs based on the difference between the desired and actual values.
The problem with standard PID control is that it can struggle when the system being controlled is subject to disturbances or changes in its underlying properties. To address this, the researchers have added a nonlinear integral term to the PID controller. This nonlinear integral term helps the controller better adapt to perturbations or uncertainties in the system, allowing it to maintain better control and ensure the system converges to the desired state more reliably.
The researchers have tested their improved PID controller on a second-order dynamic system (a type of system commonly found in engineering applications) and shown that it can outperform the standard PID controller in the presence of parameter variations or disturbances. This suggests the nonlinear integral extension could be a valuable tool for improving the performance of control systems in a variety of real-world applications.
Technical Explanation
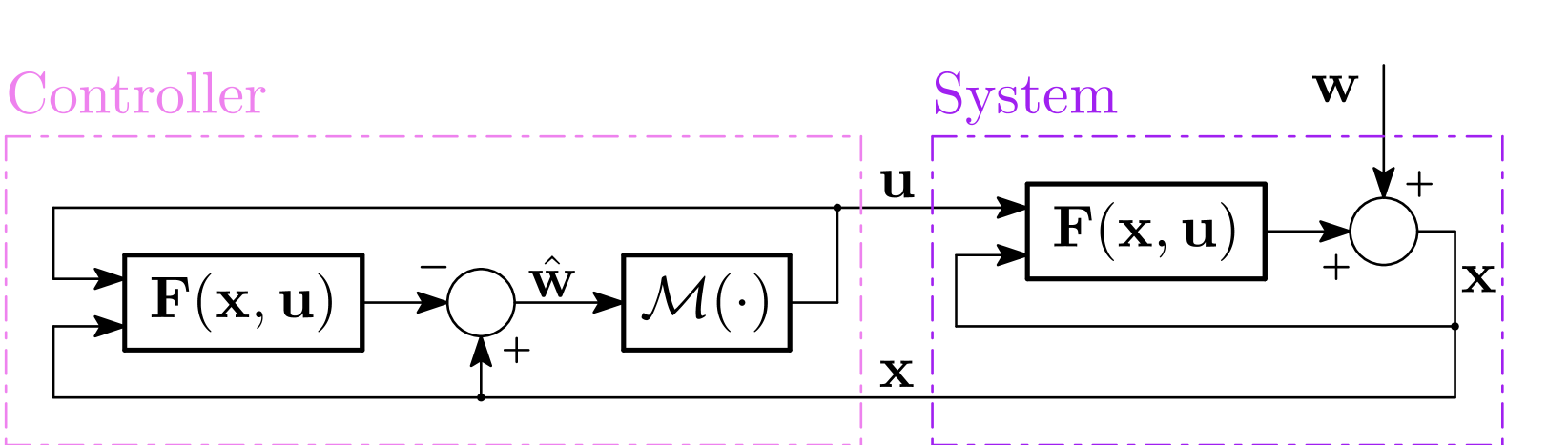
The paper presents a nonlinear integral extension of the standard PID (Proportional-Integral-Derivative) control system. The key innovation is the introduction of a nonlinear integral term, which aims to enhance the convergence properties of the controlled system in the presence of parameter variations or external disturbances.
The proposed control law takes the form:
u = Kp
where u is the control input, e is the error between the desired and actual system state, and Kp, Ki, Kd, Kni are the control gains. The nonlinear integral term int(|e|^n*sign(e)) is the key addition, with n as a tuning parameter.
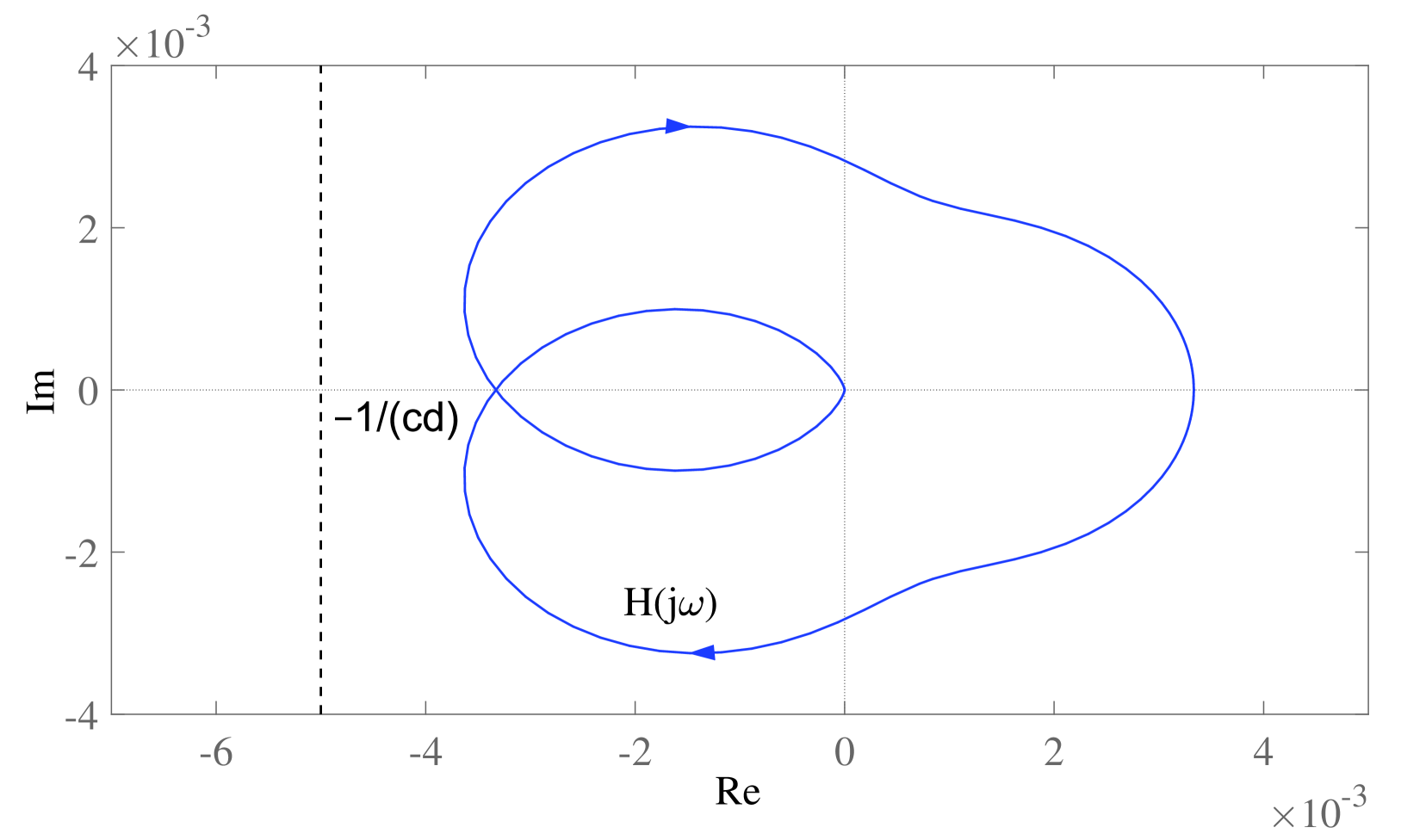
The authors provide a detailed theoretical analysis of the stability and convergence properties of the extended PID controller. They show that under certain conditions, the closed-loop system is asymptotically stable and the tracking error converges to zero, even in the presence of parameter uncertainties.
To validate the approach, the researchers conduct numerical simulations on a second-order system with variations in the system parameters. The results demonstrate that the proposed nonlinear integral PID controller outperforms the standard PID controller in terms of reducing steady-state error and improving transient response under perturbed conditions.
Critical Analysis
The paper presents a well-designed extension to the standard PID control framework that appears to offer improved performance in the face of system uncertainties and disturbances. The theoretical analysis is rigorous, and the simulation results provide convincing evidence of the benefits of the proposed nonlinear integral term.
That said, the paper does not address several important practical considerations. For example, it does not discuss the tuning of the additional control gain Kni or the sensitivity of the controller's performance to the choice of the exponent n. In real-world applications, these design parameters may require careful optimization to achieve the best results.
Additionally, the paper only considers a single second-order system in its evaluation. While this serves as a useful proof-of-concept, it would be valuable to see the controller tested on a wider range of systems, including higher-order dynamics or nonlinear plant models, to further validate its generalizability.
Finally, the paper does not mention any potential drawbacks or limitations of the nonlinear integral PID approach. For instance, the increased complexity of the control law may lead to higher computational requirements or decreased robustness in the face of measurement noise, which could be important factors in certain applications.
Overall, the proposed nonlinear integral PID controller appears to be a promising enhancement to the standard PID framework, with the potential to improve the performance of control systems in the presence of uncertainties. However, further research and real-world validation would be valuable to fully assess the practical utility and limitations of this approach.
Conclusion
The paper introduces a nonlinear integral extension to the classic PID control system, which aims to improve the convergence and tracking performance of perturbed second-order dynamic systems. By adding a nonlinear integral term to the standard PID controller, the researchers have developed a more versatile control solution that can better handle parameter variations and external disturbances.
The theoretical analysis and simulation results presented in the paper demonstrate the effectiveness of the proposed approach, suggesting it could be a valuable tool for enhancing the reliability and robustness of control systems in a variety of engineering applications. While further research is needed to fully explore the practical implications and limitations of this method, the nonlinear integral PID controller represents an interesting and potentially impactful advancement in the field of control theory.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Nonlinear integral extension of PID control with improved convergence of perturbed second-order dynamic systems
Michael Ruderman
Nonlinear extension of the integral part of PID feedback control is proposed for the perturbed second-order systems. For the matched constant perturbations, the global asymptotic stability is shown, and for Lipschitz perturbations an ultimately bounded output error is guaranteed. The second-order system plants can also be expanded by an additional (parasitic) actuator dynamics with low-pass characteristics. The proposed nonlinear control is proven to outperform its linear (PID) benchmarking counterpart during the settling phase, i.e. at convergence of the residual output error. An experimental case study of the second-order system with an additional actuator dynamics and considerable perturbation is demonstrated to confirm and benchmark the control performance.
Read more4/4/2024

0
Iterative Learning Control of Fast, Nonlinear, Oscillatory Dynamics (Preprint)
John W. Brooks, Christine M. Greve
The sudden onset of deleterious and oscillatory dynamics (often called instabilities) is a known challenge in many fluid, plasma, and aerospace systems. These dynamics are difficult to address because they are nonlinear, chaotic, and are often too fast for active control schemes. In this work, we develop an alternative active controls system using an iterative, trajectory-optimization and parameter-tuning approach based on Iterative Learning Control (ILC), Time-Lagged Phase Portraits (TLPP) and Gaussian Process Regression (GPR). The novelty of this approach is that it can control a system's dynamics despite the controller being much slower than the dynamics. We demonstrate this controller on the Lorenz system of equations where it iteratively adjusts (tunes) the system's input parameters to successfully reproduce a desired oscillatory trajectory or state. Additionally, we investigate the system's dynamical sensitivity to its control parameters, identify continuous and bounded regions of desired dynamical trajectories, and demonstrate that the controller is robust to missing information and uncontrollable parameters as long as certain requirements are met. The controller presented in this work provides a framework for low-speed control for a variety of fast, nonlinear systems that may aid in instability suppression and mitigation.
Read more5/31/2024
0
Learning to Boost the Performance of Stable Nonlinear Systems
Luca Furieri, Clara Luc'ia Galimberti, Giancarlo Ferrari-Trecate
The growing scale and complexity of safety-critical control systems underscore the need to evolve current control architectures aiming for the unparalleled performances achievable through state-of-the-art optimization and machine learning algorithms. However, maintaining closed-loop stability while boosting the performance of nonlinear control systems using data-driven and deep-learning approaches stands as an important unsolved challenge. In this paper, we tackle the performance-boosting problem with closed-loop stability guarantees. Specifically, we establish a synergy between the Internal Model Control (IMC) principle for nonlinear systems and state-of-the-art unconstrained optimization approaches for learning stable dynamics. Our methods enable learning over arbitrarily deep neural network classes of performance-boosting controllers for stable nonlinear systems; crucially, we guarantee L_p closed-loop stability even if optimization is halted prematurely, and even when the ground-truth dynamics are unknown, with vanishing conservatism in the class of stabilizing policies as the model uncertainty is reduced to zero. We discuss the implementation details of the proposed control schemes, including distributed ones, along with the corresponding optimization procedures, demonstrating the potential of freely shaping the cost functions through several numerical experiments.
Read more9/30/2024

0
Simultaneous System Identification and Model Predictive Control with No Dynamic Regret
Hongyu Zhou, Vasileios Tzoumas
We provide an algorithm for the simultaneous system identification and model predictive control of nonlinear systems. The algorithm has finite-time near-optimality guarantees and asymptotically converges to the optimal (non-causal) controller. Particularly, the algorithm enjoys sublinear dynamic regret, defined herein as the suboptimality against an optimal clairvoyant controller that knows how the unknown disturbances and system dynamics will adapt to its actions. The algorithm is self-supervised and applies to control-affine systems with unknown dynamics and disturbances that can be expressed in reproducing kernel Hilbert spaces. Such spaces can model external disturbances and modeling errors that can even be adaptive to the system's state and control input. For example, they can model wind and wave disturbances to aerial and marine vehicles, or inaccurate model parameters such as inertia of mechanical systems. The algorithm first generates random Fourier features that are used to approximate the unknown dynamics or disturbances. Then, it employs model predictive control based on the current learned model of the unknown dynamics (or disturbances). The model of the unknown dynamics is updated online using least squares based on the data collected while controlling the system. We validate our algorithm in both hardware experiments and physics-based simulations. The simulations include (i) a cart-pole aiming to maintain the pole upright despite inaccurate model parameters, and (ii) a quadrotor aiming to track reference trajectories despite unmodeled aerodynamic drag effects. The hardware experiments include a quadrotor aiming to track a circular trajectory despite unmodeled aerodynamic drag effects, ground effects, and wind disturbances.
Read more7/12/2024