Experimental System Design of an Active Fault-Tolerant Quadrotor
2404.06340
0
0

Abstract
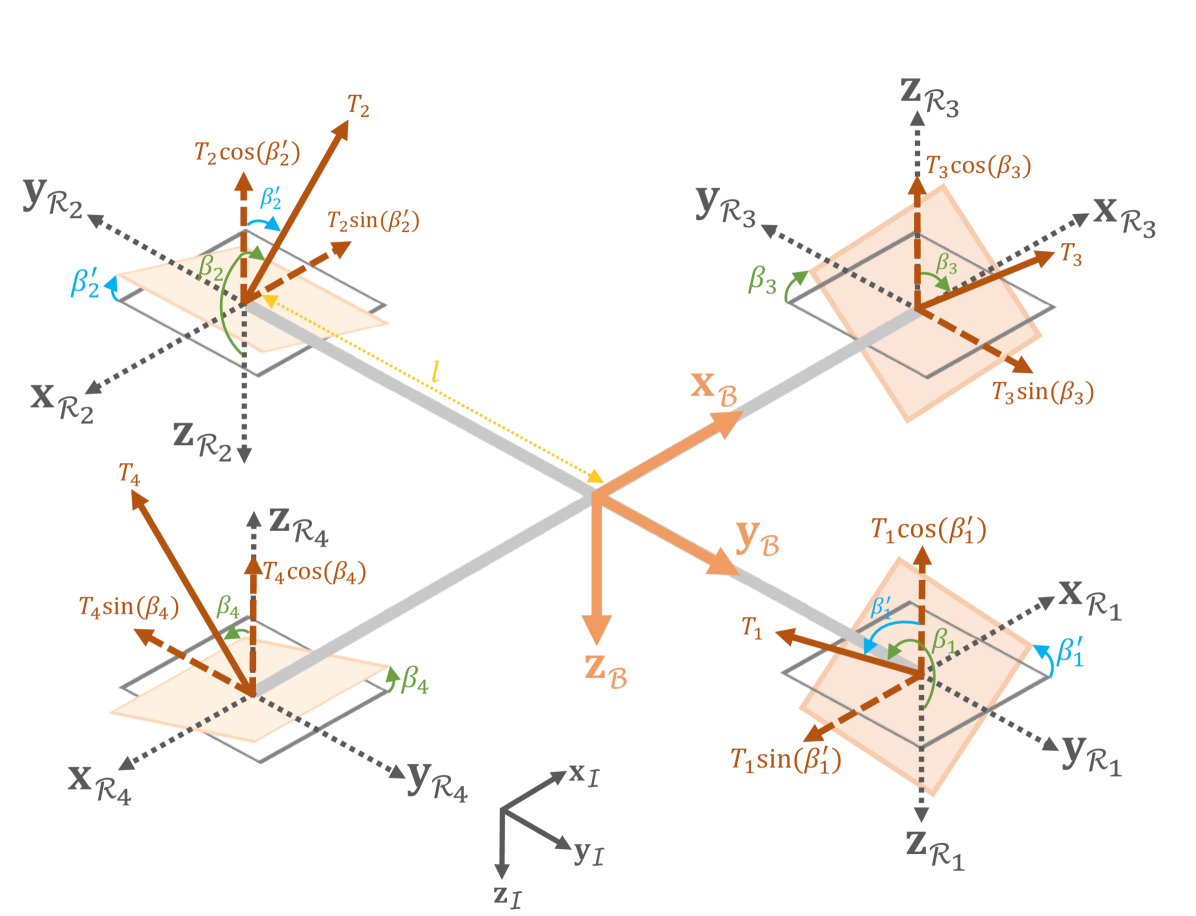
Quadrotors have gained popularity over the last decade, aiding humans in complex tasks such as search and rescue, mapping and exploration. Despite their mechanical simplicity and versatility compared to other types of aerial vehicles, they remain vulnerable to rotor failures. In this paper, we propose an algorithmic and mechanical approach to addressing the quadrotor fault-tolerant problem in case of rotor failures. First, we present a fault-tolerant detection and control scheme that includes various attitude error metrics. The scheme transitions to a fault-tolerant control mode by surrendering the yaw control. Subsequently, to ensure compatibility with platform sensing constraints, we investigate the relationship between variations in robot rotational drag, achieved through a modular mechanical design appendage, resulting in yaw rates within sensor limits. This analysis offers a platform-agnostic framework for designing more reliable and robust quadrotors in the event of rotor failures. Extensive experimental results validate the proposed approach providing insights into successfully designing a cost-effective quadrotor capable of fault-tolerant control. The overall design enhances safety in scenarios of faulty rotors, without the need for additional sensors or computational resources.
Create account to get full access
Overview
- This paper presents the experimental design of an active fault-tolerant quadrotor system, which is capable of maintaining stable flight even in the presence of faults or failures in its components.
- The researchers developed a novel fault detection and isolation (FDI) algorithm and an active fault-tolerant control (AFTC) strategy to enable the quadrotor to adapt and recover from various types of faults.
- The system was extensively tested in simulation and real-world experiments to validate its effectiveness in handling different fault scenarios.
Plain English Explanation
The paper describes the design and development of a quadrotor drone that can continue flying even if something goes wrong with its components. Quadrotors are a type of drone that uses four rotors to fly, and they're often used for tasks like aerial photography or inspection. However, if one of the motors or other parts fails, the drone can lose control and crash.
To address this issue, the researchers created a new system that can detect when something is wrong and automatically adjust the drone's flight to compensate. This "fault-tolerant" system uses advanced algorithms to quickly identify the problem and make the necessary adjustments to maintain stable flight. The researchers tested this system extensively, both in computer simulations and in real-world experiments, to ensure it can handle a variety of failure scenarios.
The goal is to create a more reliable and resilient drone that can continue operating safely even if something unexpected happens. This could be particularly useful for tasks like search and rescue missions or inspecting critical infrastructure, where a drone failure could have serious consequences. By making drones more fault-tolerant, the researchers hope to expand their capabilities and unlock new applications.
Technical Explanation
The paper presents the experimental design and evaluation of an active fault-tolerant quadrotor system. The researchers developed a novel Fault Detection and Isolation (FDI) algorithm that can quickly identify different types of faults, such as motor failures or sensor malfunctions. This FDI algorithm is then integrated with an Active Fault-Tolerant Control (AFTC) strategy to enable the quadrotor to adapt its flight behavior and maintain stability in the presence of faults.
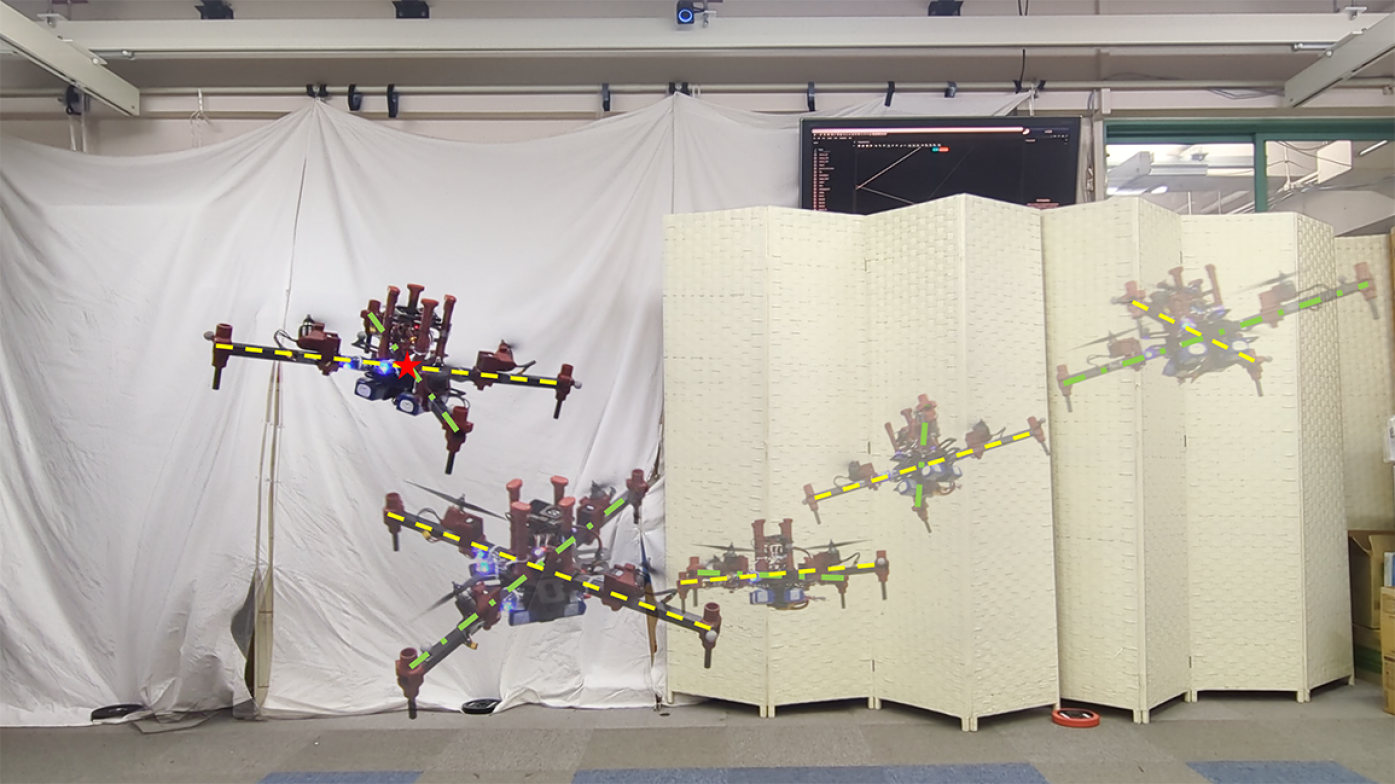
The experimental setup includes a custom-built quadrotor platform, a motion capture system for precise state estimation, and a hardware-in-the-loop simulation environment for extensive testing. The researchers conducted a series of experiments to evaluate the system's performance under various fault scenarios, including single and multiple motor failures, sensor faults, and external disturbances.
Critical Analysis
The paper provides a comprehensive experimental evaluation of the proposed active fault-tolerant quadrotor system, covering a wide range of fault scenarios and leveraging a well-designed testing setup. The researchers have demonstrated the system's ability to detect and isolate various types of faults and implement appropriate control strategies to maintain stable flight.
Further research could investigate the scalability and robustness of the fault-tolerant system when deployed in more realistic and demanding operational environments. Exploring the trade-offs between fault-tolerance, system complexity, and overall performance would also be valuable for guiding the development of practical fault-tolerant UAV systems.
Conclusion
The experimental design and evaluation presented in this paper represent a significant advancement in the field of fault-tolerant quadrotor control. The researchers have developed a comprehensive active fault-tolerant system that can detect and recover from various types of faults, enabling the quadrotor to maintain stable flight even in the presence of component failures or malfunctions.
The successful implementation and testing of this system in simulation and real-world experiments demonstrate its potential to enhance the reliability and resilience of quadrotor drones, paving the way for their wider adoption in critical applications where fault tolerance is paramount. As the field of drone technology continues to evolve, the insights and techniques presented in this paper can serve as a valuable reference for researchers and engineers working to push the boundaries of fault-tolerant unmanned aerial vehicle control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
0
0
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
6/26/2024
📉
Modular Multi-Rotors: From Quadrotors to Fully-Actuated Aerial Vehicles
Jiawei Xu, Diego S. D'Antonio, David Salda~na
0
0
Traditional aerial vehicles have specific characteristics to perform specific tasks but designing a versatile vehicle that can adapt depending on the task is still a challenge. Based on modularity, we propose an aerial robotic system that can increase its payload capacity and actuated degrees of freedom by reconfiguring heterogeneous modules to adapt to different task specifications. The system consists of cuboid modules propelled by quadrotors with tilted rotors. We present two module designs with different actuation properties. By assembling different types of modules, H-ModQuad can increase its actuated degrees of freedom from 4 to 5 and 6 depending on its configuration. By extending the concept of actuation ellipsoids, we find the body frame of a vehicle with which the controller can maximize the maximum thrust. We use polytopes to represent the actuation capability of the vehicles and examine them against task requirements. We derive the modular vehicles' dynamics and propose a general control strategy that applies for all possible numbers of actuated degrees of freedom. The design is validated with simulations and experiments using actual robots, showing that the modular vehicles provide different actuation properties.
5/2/2024

Control of Unknown Quadrotors from a Single Throw
Till M. Blaha, Ewoud J. J. Smeur, Bart D. W. Remes
0
0
This paper presents a method to recover quadrotor UAV from a throw, when no control parameters are known before the throw. We leverage the availability of high-frequency rotor speed feedback available in racing drone hardware and software to find control effectiveness values and fit a motor model using recursive least squares (RLS) estimation. Furthermore, we propose an excitation sequence that provides large actuation commands while guaranteeing to stay within gyroscope sensing limits. After 450ms of excitation, an INDI attitude controller uses the 52 fitted parameters to arrest rotational motion and recover an upright attitude. Finally, a NDI position controller drives the craft to a position setpoint. The proposed algorithm runs efficiently on microcontrollers found in common UAV flight controllers, and was shown to recover an agile quadrotor every time in 57 live experiments with as low as 3.5m throw height, demonstrating robustness against initial rotations and noise. We also demonstrate control of randomized quadrotors in simulated throws, where the parameter fitting RMS error is typically within 10% of the true value.
6/21/2024
Servo Integrated Nonlinear Model Predictive Control for Overactuated Tiltable-Quadrotors
Jinjie Li, Junichiro Sugihara, Moju Zhao
0
0
Quadrotors are widely employed across various domains, yet the conventional type faces limitations due to underactuation, where attitude control is closely tied to positional adjustments. In contrast, quadrotors equipped with tiltable rotors offer overactuation, empowering them to track both position and attitude trajectories. However, the nonlinear dynamics of the drone body and the sluggish response of tilting servos pose challenges for conventional cascade controllers. In this study, we propose a control methodology for tilting-rotor quadrotors based on nonlinear model predictive control (NMPC). Unlike conventional approaches, our method preserves the full dynamics without simplification and utilizes actuator commands directly as control inputs. Notably, we incorporate a first-order servo model within the NMPC framework. Through simulation, we observe that integrating the servo dynamics not only enhances control performance but also accelerates convergence. To assess the efficacy of our approach, we fabricate a tiltable-quadrotor and deploy the algorithm onboard at a frequency of 100Hz. Extensive real-world experiments demonstrate rapid, robust, and smooth pose tracking performance.
5/17/2024