A Novel Aerial-Aquatic Locomotion Robot with Variable Stiffness Propulsion Module

0
Sign in to get full access
Overview
- Presents a novel aerial-aquatic locomotion robot with a variable stiffness propulsion module
- Discusses the design and analysis of the robot's ability to operate in both aerial and aquatic environments
- Focuses on the key component - a variable stiffness propulsion module that enables the robot to adapt its locomotion capabilities
Plain English Explanation
The paper describes the development of a unique robot that can move through the air and water. This robot has a special propulsion module that can change its stiffness, or rigidity. This allows the robot to adjust its movements to work effectively in both aerial and aquatic environments.
The robot uses a low melting point alloy that can transform between a soft, flexible state and a rigid, stiff state. In the soft state, the robot can propel itself through water, while in the stiff state, it can fly through the air. This adaptability is a key innovation that enables the robot to operate in a wide range of settings, both above and below the water's surface.
Technical Explanation
The paper presents the design and analysis of an aerial-aquatic locomotion robot with a variable stiffness propulsion module. The robot uses a low melting point alloy that can transition between a soft, flexible state and a rigid, stiff state, allowing it to effectively move through both air and water.
The variable stiffness propulsion module is the core component that enables this dual-environment capability. In the soft state, the module can generate thrust for aquatic propulsion, while in the stiff state, it can provide the necessary rigidity for aerial flight. The researchers analyze the robot's performance in both aerial and aquatic modes, identifying the key design parameters and operational limitations.
Critical Analysis
The paper presents a promising approach to developing a versatile robot capable of operating in both aerial and aquatic environments. The use of a variable stiffness propulsion module is an innovative solution to the challenge of adapting to different media and modes of locomotion.
However, the research does not fully address the potential limitations and trade-offs of this design. For example, the power consumption and efficiency of the robot in each mode, as well as the reliability and durability of the variable stiffness mechanism, are not thoroughly explored. Additionally, the paper does not compare the robot's performance to other existing aerial-aquatic robots or discuss potential areas for further improvement.
Conclusion
This paper introduces a novel aerial-aquatic locomotion robot with a variable stiffness propulsion module, which enables the robot to operate effectively in both air and water. The use of a low melting point alloy to achieve this adaptability is a unique and promising approach. While the research provides a solid technical foundation, further exploration of the practical implications and limitations of this design would be valuable for advancing the field of amphibious robotics and informing future development efforts.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Novel Aerial-Aquatic Locomotion Robot with Variable Stiffness Propulsion Module
Junzhe Hu, Pengyu Chen, Tianxiang Feng, Yuxuan Wen, Ke Wu, Janet Dong
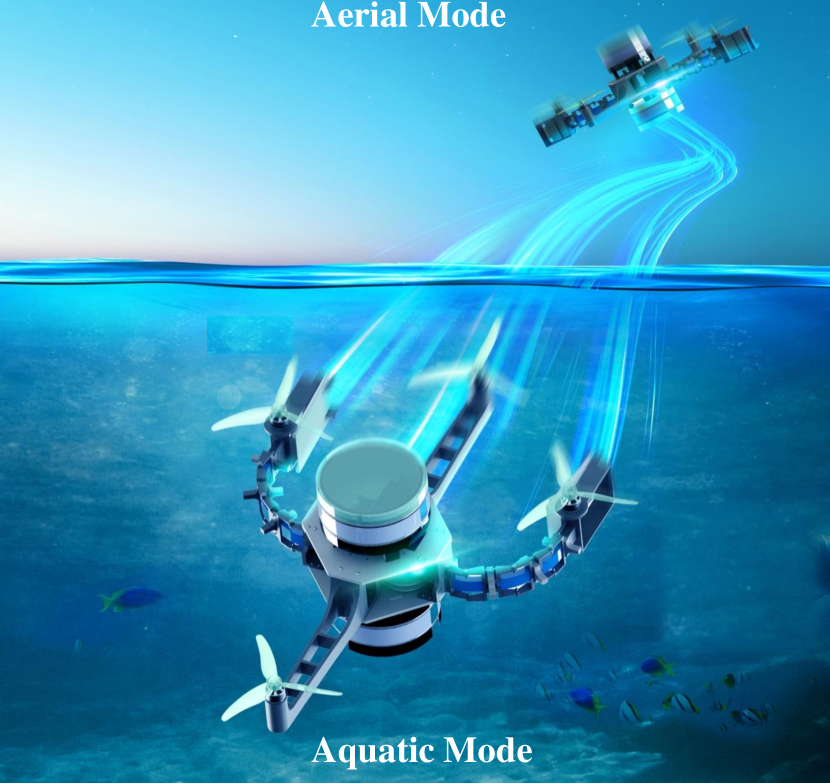
In recent years, the development of robots capable of operating in both aerial and aquatic environments has gained significant attention. This study presents the design and fabrication of a novel aerial-aquatic locomotion robot (AALR). Inspired by the diving beetle, the AALR incorporates a biomimetic propulsion mechanism with power and recovery strokes. The variable stiffness propulsion module (VSPM) uses low melting point alloy (LMPA) and variable stiffness joints (VSJ) to achieve efficient aquatic locomotion while reduce harm to marine life. The AALR's innovative design integrates the VSPM into the arms of a traditional quadrotor, allowing for effective aerial-aquatic locomotion. The VSPM adjusts joint stiffness through temperature control, meeting locomotion requirements in both aerial and aquatic modes. A dynamic model for the VSPM was developed, with optimized dimensional parameters to increase propulsion force. Experiments focused on aquatic mode analysis and demonstrated the AALR's swimming capability, achieving a maximum swimming speed of 77 mm/s underwater. The results confirm the AALR's effective performance in water environment, highlighting its potential for versatile, eco-friendly operations.
Read more9/17/2024
👀
0
New!AquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation
Matthew Fernandez, Tianyu Wang, Galen Tunnicliffe, Donoven Dortilus, Peter Gunnarson, John O. Dabiri, Daniel I. Goldman
This paper presents AquaMILR+, an untethered limbless robot designed for agile navigation in complex aquatic environments. The robot features a bilateral actuation mechanism that models musculoskeletal actuation in many anguilliform swimming organisms which propagates a moving wave from head to tail allowing open fluid undulatory swimming. This actuation mechanism employs mechanical intelligence, enhancing the robot's maneuverability when interacting with obstacles. AquaMILR+ also includes a compact depth control system inspired by the swim bladder and lung structures of eels and sea snakes. The mechanism, driven by a syringe and telescoping leadscrew, enables depth and pitch control-capabilities that are difficult for most anguilliform swimming robots to achieve. Additional structures, such as fins and a tail, further improve stability and propulsion efficiency. Our tests in both open water and indoor 2D and 3D heterogeneous aquatic environments highlight AquaMILR+'s capabilities and suggest a promising system for complex underwater tasks such as search and rescue and deep-sea exploration.
Read more9/30/2024
↗️
0
New!Progress Towards Submersible Microrobots: A Novel 13-mg Low-Power SMA-Based Actuator for Underwater Propulsion
Cody R. Longwell, Conor K. Trygstad, Francisco M. F. R. Goncalves, Ke Xu, Nestor O. Perez-Arancibia
We introduce a new low-power 13-mg microactuator driven by shape-memory alloy (SMA) wires for underwater operation. The development of this device was motivated by the recent creation of microswimmers such as the FRISHBot, WaterStrider, VLEIBot, VLEIBot+, and VLEIBot++. The first four of these robots, ranging from 30 to 90 mg, function tethered to an electrical power supply while the last platform is an 810-mg fully autonomous system. These five robots are driven by dry SMA-based microactuators first developed for microrobotic crawlers such as the SMALLBug and SMARTI. As shown in this abstract, dry SMA-based actuators do not operate efficiently under water due to high heat-transfer rates in this medium; for example, the actuators that drive the VLEIBot++ require about 40 mW of average power at 1 Hz in dry air while requiring about 900 mW of average power at 1 Hz in water. In contrast, the microactuator presented in this abstract consumes about 150 mW of average power at 1 Hz in both dry air and water; additionally, it can be excited directly using an onboard battery through simple power electronics implemented on a custom-built printed circuit board (PCB). This technological breakthrough was enabled by the integration of a soft structure that encapsulates the SMA wires that drive the actuator in order to passively control the rates of heat transfer. The results presented here represent preliminary, yet compelling, experimental evidence that the proposed actuation approach will enable the development of fully autonomous and controllable submersible microswimmers. To accomplish this objective, we will evolve the current version of the VLEIBot++ and introduce new bioinspired underwater propulsion mechanisms.
Read more9/30/2024
🚀
0
A Compact Variable Stiffness Actuator for Agile Legged Locomotion
Lei Yu, Haizhou Zhao, Siying Qin, Gumin Jin, Yuqing Chen
The legged robots with variable stiffness actuators (VSAs) can achieve energy-efficient and versatile locomotion. However, equipping legged robots with VSAs in real-world application is usually restricted by (i) the redundant mechanical structure design, (ii) limited stiffness variation range and speed, (iii) high energy consumption in stiffness modulation, and (iv) the lack of online stiffness control structure with high performance. In this paper, we present a novel Variable-Length Leaf-Spring Actuator (VLLSA) designed for legged robots that aims to address the aforementioned limitations. The design is based on leaf-spring mechanism and we improve the structural design to make the proposed VSA (i) compact and lightweight in mechanical structure, (ii) precise in theoretical modeling, and (iii) capable of modulating stiffness with wide range, fast speed, low energy consumption and high control performance. Hardware experiments including in-place and forward hopping validate advantages of the proposed VLLSA.
Read more7/17/2024