A Compact Variable Stiffness Actuator for Agile Legged Locomotion

0
🚀
Sign in to get full access
Overview
- Legged robots with variable stiffness actuators (VSAs) can achieve energy-efficient and versatile locomotion
- However, equipping legged robots with VSAs in real-world applications is often restricted by:
- Redundant mechanical structure design
- Limited stiffness variation range and speed
- High energy consumption in stiffness modulation
- Lack of high-performance online stiffness control structure
Plain English Explanation
The paper presents a novel Variable-Length Leaf-Spring Actuator (VLLSA) designed for legged robots to address these limitations. The VLLSA uses a leaf-spring mechanism to provide a compact, lightweight, and precise actuator that can modulate stiffness over a wide range, at high speed, and with low energy consumption, while also enabling high-performance online control.
The key advantages of the VLLSA are its ability to:
- Achieve energy-efficient and versatile locomotion through variable stiffness
- Overcome the mechanical design challenges that have restricted the real-world use of VSAs in legged robots
- Provide precise modeling, wide stiffness variation range, fast speed, low energy consumption, and high control performance
By addressing these challenges, the VLLSA represents a significant advancement in the field of legged robotics, potentially enabling the development of more capable and efficient robots for a variety of real-world applications.
Technical Explanation
The paper presents the design and evaluation of the Variable-Length Leaf-Spring Actuator (VLLSA) for legged robots. The VLLSA is based on a leaf-spring mechanism, which the authors have improved to address the limitations of existing VSA designs.
Key features of the VLLSA design include:
- Compact and lightweight mechanical structure
- Precise theoretical modeling for accurate performance prediction
- Capability to modulate stiffness with a wide range, fast speed, low energy consumption, and high control performance
The authors conducted hardware experiments, including in-place and forward hopping, to validate the advantages of the proposed VLLSA. The results demonstrate the VLLSA's ability to achieve energy-efficient and versatile locomotion, overcoming the challenges that have restricted the real-world use of VSAs in legged robots.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated variable stiffness actuator for legged robots. The authors have addressed several key limitations of existing VSA designs, such as redundant mechanical structure, limited stiffness variation, and high energy consumption, which have hindered the real-world application of these technologies.
One potential area for further research could be exploring the adaptive stiffness control strategies and their integration with the VLLSA, which could potentially enhance the robot's agility and versatility during locomotion. Additionally, the authors could investigate the scalability of the VLLSA design to different robot sizes and application domains.
Overall, the VLLSA represents a significant advancement in the field of legged robotics, and the insights from this research can contribute to the development of more capable and efficient robotic systems for a variety of real-world applications.
Conclusion
The paper presents a novel Variable-Length Leaf-Spring Actuator (VLLSA) designed to address the limitations of existing variable stiffness actuators (VSAs) in legged robots. The VLLSA's compact and lightweight design, precise modeling, and advanced stiffness modulation capabilities enable energy-efficient and versatile locomotion, overcoming the challenges that have restricted the real-world use of VSAs.
The successful validation of the VLLSA through hardware experiments highlights its potential to contribute to the advancement of legged robotics and the development of more capable and efficient robotic systems for a wide range of applications, from search and rescue operations to assistive technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🚀
0
A Compact Variable Stiffness Actuator for Agile Legged Locomotion
Lei Yu, Haizhou Zhao, Siying Qin, Gumin Jin, Yuqing Chen
The legged robots with variable stiffness actuators (VSAs) can achieve energy-efficient and versatile locomotion. However, equipping legged robots with VSAs in real-world application is usually restricted by (i) the redundant mechanical structure design, (ii) limited stiffness variation range and speed, (iii) high energy consumption in stiffness modulation, and (iv) the lack of online stiffness control structure with high performance. In this paper, we present a novel Variable-Length Leaf-Spring Actuator (VLLSA) designed for legged robots that aims to address the aforementioned limitations. The design is based on leaf-spring mechanism and we improve the structural design to make the proposed VSA (i) compact and lightweight in mechanical structure, (ii) precise in theoretical modeling, and (iii) capable of modulating stiffness with wide range, fast speed, low energy consumption and high control performance. Hardware experiments including in-place and forward hopping validate advantages of the proposed VLLSA.
Read more7/17/2024
0
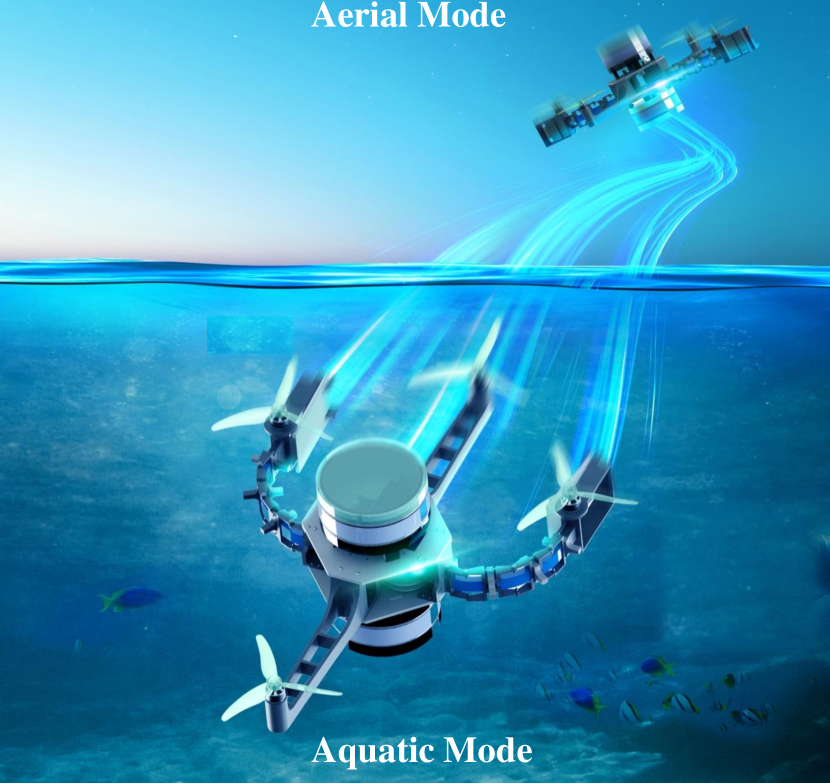
A Novel Aerial-Aquatic Locomotion Robot with Variable Stiffness Propulsion Module
Junzhe Hu, Pengyu Chen, Tianxiang Feng, Yuxuan Wen, Ke Wu, Janet Dong
In recent years, the development of robots capable of operating in both aerial and aquatic environments has gained significant attention. This study presents the design and fabrication of a novel aerial-aquatic locomotion robot (AALR). Inspired by the diving beetle, the AALR incorporates a biomimetic propulsion mechanism with power and recovery strokes. The variable stiffness propulsion module (VSPM) uses low melting point alloy (LMPA) and variable stiffness joints (VSJ) to achieve efficient aquatic locomotion while reduce harm to marine life. The AALR's innovative design integrates the VSPM into the arms of a traditional quadrotor, allowing for effective aerial-aquatic locomotion. The VSPM adjusts joint stiffness through temperature control, meeting locomotion requirements in both aerial and aquatic modes. A dynamic model for the VSPM was developed, with optimized dimensional parameters to increase propulsion force. Experiments focused on aquatic mode analysis and demonstrated the AALR's swimming capability, achieving a maximum swimming speed of 77 mm/s underwater. The results confirm the AALR's effective performance in water environment, highlighting its potential for versatile, eco-friendly operations.
Read more9/17/2024
🤔
0
Development of Bidirectional Series Elastic Actuator with Torsion Coil Spring and Implementation to the Legged Robot
Yuta Koda, Hiroshi Osawa, Norio Nagatsuka, Shinichi Kariya, Taeko Inagawa, Kensaku Ishizuka
Many studies have been conducted on Series Elastic Actuators (SEA) for robot joints because they are effective in terms of flexibility, safety, and energy efficiency. The ability of SEA to robustly handle unexpected disturbances has raised expectations for practical applications in environments where robots interact with humans. On the other hand, the development and commercialization of small robots for indoor entertainment applications is also actively underway, and it is thought that by using SEA in these robots, dynamic movements such as jumping and running can be realized. In this work, we developed a small and lightweight SEA using coil springs as elastic elements. By devising a method for fixing the coil spring, it is possible to absorb shock and perform highly accurate force measurement in both rotational directions with a simple structure. In addition, to verify the effectiveness of the developed SEA, we created a small single-legged robot with SEA implemented in the three joints of the hip, knee, and ankle, and we conducted a drop test. By adjusting the initial posture and control gain of each joint, we confirmed that flexible landing and continuous hopping are possible with simple PD position control. The measurement results showed that SEA is effective in terms of shock absorption and energy reuse. This work was performed for research purposes only.
Read more9/25/2024

0
Optimizing Design and Control of Running Robots Abstracted as Torque Driven Spring Loaded Inverted Pendulum (TD-SLIP)
Reed Truax, Feng Liu, Souma Chowdhury, Ryan St. Pierre
Legged locomotion shows promise for running in complex, unstructured environments. Designing such legged robots requires considering heterogeneous, multi-domain constraints and variables, from mechanical hardware and geometry choices to controller profiles. However, very few formal or systematic (as opposed to ad hoc) design formulations and frameworks exist to identify feasible and robust running platforms, especially at the small (sub 500 g) scale. This critical gap in running legged robot design is addressed here by abstracting the motion of legged robots through a torque-driven spring-loaded inverted pendulum (TD-SLIP) model, and deriving constraints that result in stable cyclic forward locomotion in the presence of system noise. Synthetic noise is added to the initial state in candidate design evaluation to simulate accumulated errors in an open-loop control. The design space was defined in terms of morphological parameters, such as the leg properties and system mass, actuator selection, and an open loop voltage profile. These attributes were optimized with a well-known particle swarm optimization solver that can handle mixed-discrete variables. Two separate case studies minimized the difference in touchdown angle from stride to stride and the actuation energy, respectively. Both cases resulted in legged robot designs with relatively repeatable and stable dynamics, while presenting distinct geometry and controller profile choices.
Read more7/18/2024