Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation

0
🏋️
Sign in to get full access
Overview
- Nonprehensile actions like pushing are crucial for solving multi-object rearrangement problems.
- Existing nonprehensile solutions are robot-centric, where manipulation actions are generated with robot-relevant intent and their outcomes are evaluated afterwards.
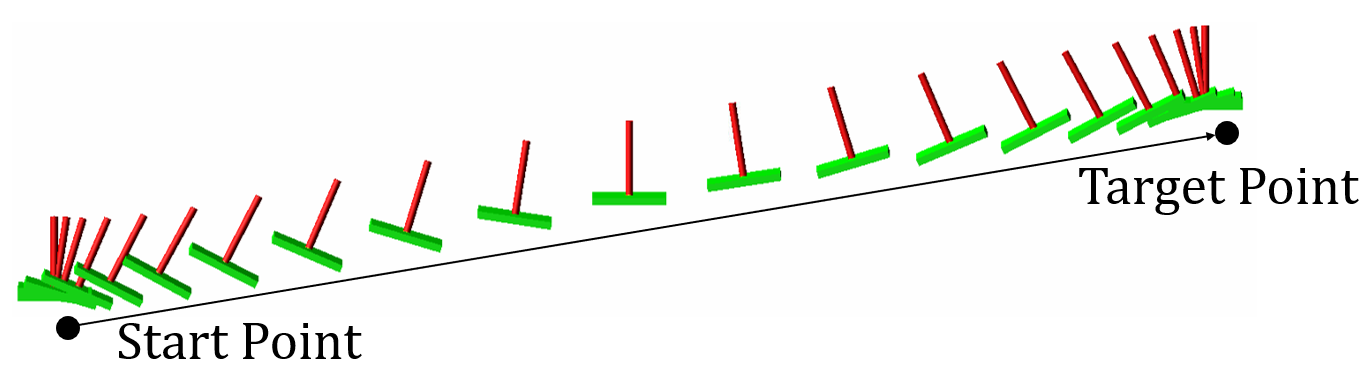
- This paper proposes a novel object-centric planning paradigm and develops the first object-centric planner for general nonprehensile rearrangement problems.
Plain English Explanation
The paper discusses the importance of nonprehensile actions, such as pushing, for solving problems where multiple objects need to be rearranged. Existing solutions for these types of problems have been robot-centric, meaning the manipulation actions are generated with the robot's needs in mind and their outcomes are evaluated afterwards.
This is very different from how humans approach these tasks. The paper proposes a new object-centric planning paradigm, where the focus is on planning the desired motions of the objects themselves. The robot's actions are then generated in real-time to achieve these object motions using a closed-loop pushing strategy.
The researchers show that this object-centric approach can generate more intuitive and effective robot actions, and significantly improves the efficiency of the overall task compared to existing robot-centric methods. They also propose a new benchmarking protocol to help standardize and facilitate future research in this area.
Technical Explanation
The paper introduces an object-centric planning paradigm for solving general nonprehensile rearrangement problems. Instead of the traditional robot-centric approach, where robot actions are generated and then evaluated, the object-centric planner focuses on planning the desired motions of the objects themselves.
The key idea is to assume that each object can actively move without being driven by robot interactions. The planner then generates these desired object motions, which are realized via robot actions produced in real-time using a closed-loop pushing strategy.
Through extensive experiments in simulation and on a physical robot, the researchers show that their object-centric approach can generate more intuitive and task-effective robot actions with significantly improved efficiency compared to state-of-the-art robot-centric baselines.
Additionally, the paper proposes a new benchmarking protocol to help standardize and facilitate future research in the area of nonprehensile rearrangement.
Critical Analysis
The paper presents a novel and promising approach to solving nonprehensile rearrangement problems. The key strength of the object-centric paradigm is that it aligns more closely with human strategies, which tend to focus on the desired object motions rather than the robot's own actions.
However, the paper does not address the potential limitations of this approach. For instance, the assumption that each object can actively move without robot interaction may not always be valid, especially in more cluttered or constrained environments. Additionally, the closed-loop pushing strategy may not be able to handle all types of object geometries and surface properties.
Further research could explore ways to relax these assumptions, as well as investigate the scalability of the object-centric planner to larger and more complex scenes. Incorporating feedback from tactile sensors could also help improve the robustness of the pushing strategy.
Conclusion
This paper presents a novel object-centric planning paradigm for solving nonprehensile rearrangement problems, which represents a significant departure from the traditional robot-centric approaches. The proposed planner demonstrates improved efficiency and more intuitive robot actions compared to state-of-the-art baselines.
The development of this object-centric approach and the accompanying benchmarking protocol are important steps towards advancing the field of nonprehensile manipulation, which is crucial for addressing complex real-world problems involving the rearrangement of multiple objects.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
0
New!Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation
Kejia Ren, Gaotian Wang, Andrew S. Morgan, Lydia E. Kavraki, Kaiyu Hang
Nonprehensile actions such as pushing are crucial for addressing multi-object rearrangement problems. To date, existing nonprehensile solutions are all robot-centric, i.e., the manipulation actions are generated with robot-relevant intent and their outcomes are passively evaluated afterwards. Such pipelines are very different from human strategies and are typically inefficient. To this end, this work proposes a novel object-centric planning paradigm and develops the first object-centric planner for general nonprehensile rearrangement problems. By assuming that each object can actively move without being driven by robot interactions, the object-centric planner focuses on planning desired object motions, which are realized via robot actions generated online via a closed-loop pushing strategy. Through extensive experiments and in comparison with state-of-the-art baselines in both simulation and on a physical robot, we show that our object-centric paradigm can generate more intuitive and task-effective robot actions with significantly improved efficiency. In addition, we propose a benchmarking protocol to standardize and facilitate future research in nonprehensile rearrangement.
Read more10/2/2024
🤷
0
ReloPush: Multi-object Rearrangement in Confined Spaces with a Nonholonomic Mobile Robot Pusher
Jeeho Ahn, Christoforos Mavrogiannis
We focus on the problem of rearranging a set of objects within a confined space with a nonholonomically constrained mobile robot pusher. This problem is relevant to many real-world domains, including warehouse automation and construction. These domains give rise to instances involving a combination of geometric, kinematic, and physics constraints, which make planning particularly challenging. Prior work often makes simplifying assumptions like the use of holonomic mobile robots or dexterous manipulators capable of unconstrained overhand reaching. Our key insight is we can empower even a constrained mobile pusher to tackle complex rearrangement tasks by enabling it to modify the environment to its favor in a constraint-aware fashion. To this end, we describe a Push-Traversability graph, whose vertices represent poses that the pusher can push objects from and edges represent optimal, kinematically feasible, and stable push-rearrangements of objects. Based on this graph, we develop ReloPush, a planning framework that leverages Dubins curves and standard graph search techniques to generate an efficient sequence of object rearrangements to be executed by the pusher. We evaluate ReloPush across a series of challenging scenarios, involving the rearrangement of densely cluttered workspaces with up to eight objects by a 1tenth mobile robot pusher. ReloPush exhibits orders of magnitude faster runtimes and significantly more robust execution in the real world, evidenced in lower execution times and fewer losses of object contact, compared to two baselines lacking our proposed graph structure.
Read more9/30/2024
0
Time-Optimized Trajectory Planning for Non-Prehensile Object Transportation in 3D
Lingyun Chen, Haoyu Yu, Abdeldjallil Naceri, Abdalla Swikir, Sami Haddadin
Non-prehensile object transportation offers a way to enhance robotic performance in object manipulation tasks, especially with unstable objects. Effective trajectory planning requires simultaneous consideration of robot motion constraints and object stability. Here, we introduce a physical model for object stability and propose a novel trajectory planning approach for non-prehensile transportation along arbitrary straight lines in 3D space. Validation with a 7-DoF Franka Panda robot confirms improved transportation speed via tray rotation integration while ensuring object stability and robot motion constraints.
Read more8/30/2024

0
Tactile-Driven Non-Prehensile Object Manipulation via Extrinsic Contact Mode Control
Miquel Oller, Dmitry Berenson, Nima Fazeli
In this paper, we consider the problem of non-prehensile manipulation using grasped objects. This problem is a superset of many common manipulation skills including instances of tool-use (e.g., grasped spatula flipping a burger) and assembly (e.g., screwdriver tightening a screw). Here, we present an algorithmic approach for non-prehensile manipulation leveraging a gripper with highly compliant and high-resolution tactile sensors. Our approach solves for robot actions that drive object poses and forces to desired values while obeying the complex dynamics induced by the sensors as well as the constraints imposed by static equilibrium, object kinematics, and frictional contact. Our method is able to produce a variety of manipulation skills and is amenable to gradient-based optimization by exploiting differentiability within contact modes (e.g., specifications of sticking or sliding contacts). We evaluate 4 variants of controllers that attempt to realize these plans and demonstrate a number of complex skills including non-prehensile planar sliding and pivoting on a variety of object geometries. The perception and controls capabilities that drive these skills are the building blocks towards dexterous and reactive autonomy in unstructured environments.
Read more5/29/2024