Time-Optimized Trajectory Planning for Non-Prehensile Object Transportation in 3D

0
Sign in to get full access
Overview
- Presents a time-optimized trajectory planning method for non-prehensile object transportation in 3D
- Focuses on efficiently moving an object from one location to another without grasping it
- Aims to minimize the time required for the transportation task
Plain English Explanation
The paper discusses a technique for planning the movement of an object from one point to another in 3D space, without actually grabbing or holding the object. This is known as "non-prehensile" object transportation. The key goal is to find the fastest way to move the object to its destination.
To do this, the researchers developed a method that optimizes the trajectory, or path, that the object takes. They want to minimize the total time it takes for the object to reach its final location. This could be useful in scenarios where you need to quickly move an object from one place to another, without being able to firmly grasp it, such as moving objects in dynamic environments or transporting delicate items.
Technical Explanation
The paper presents a time-optimal trajectory planning method for non-prehensile object transportation in 3D. The key steps are:
- Object Representation: The object's shape and properties are modeled using a set of point masses connected by springs.
- Trajectory Optimization: An optimization problem is formulated to find the fastest trajectory that moves the object from the start to the goal position, subject to constraints like object dynamics and collision avoidance.
- Efficient Optimization: The researchers use a novel approach to reduce the state vector during the optimization process, significantly improving computational efficiency.
The proposed method is evaluated through simulations and experiments, demonstrating its ability to generate time-optimal trajectories for non-prehensile object transportation tasks.
Critical Analysis
The paper provides a comprehensive and practical solution for time-optimized trajectory planning in non-prehensile object transportation. However, the researchers acknowledge some limitations:
- The method assumes the object's shape and properties are known in advance, which may not always be the case in real-world scenarios.
- The experiments were conducted in a controlled laboratory setting, and the performance may differ when deployed in more complex, dynamic environments.
- The computational efficiency of the optimization process, while improved, may still be a concern for real-time applications, especially for larger or more complex objects.
Further research could explore ways to relax the assumptions about object knowledge, adapt the method to handle uncertainty, and enhance the computational performance for practical deployment.
Conclusion
This paper presents a novel approach for time-optimized trajectory planning in non-prehensile object transportation tasks. By modeling the object as a set of connected point masses and using a computationally efficient optimization process, the researchers demonstrate the ability to generate fast and collision-free trajectories. While some limitations exist, this work contributes to the broader field of robotic manipulation and could have applications in areas like autonomous transportation and dynamic object handling.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Time-Optimized Trajectory Planning for Non-Prehensile Object Transportation in 3D
Lingyun Chen, Haoyu Yu, Abdeldjallil Naceri, Abdalla Swikir, Sami Haddadin
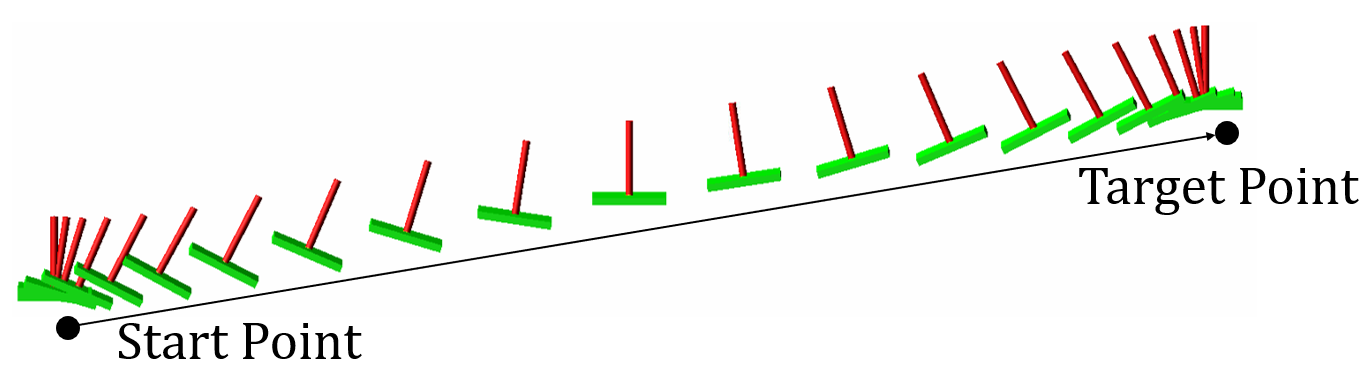
Non-prehensile object transportation offers a way to enhance robotic performance in object manipulation tasks, especially with unstable objects. Effective trajectory planning requires simultaneous consideration of robot motion constraints and object stability. Here, we introduce a physical model for object stability and propose a novel trajectory planning approach for non-prehensile transportation along arbitrary straight lines in 3D space. Validation with a 7-DoF Franka Panda robot confirms improved transportation speed via tray rotation integration while ensuring object stability and robot motion constraints.
Read more8/30/2024
🏋️
0
New!Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation
Kejia Ren, Gaotian Wang, Andrew S. Morgan, Lydia E. Kavraki, Kaiyu Hang
Nonprehensile actions such as pushing are crucial for addressing multi-object rearrangement problems. To date, existing nonprehensile solutions are all robot-centric, i.e., the manipulation actions are generated with robot-relevant intent and their outcomes are passively evaluated afterwards. Such pipelines are very different from human strategies and are typically inefficient. To this end, this work proposes a novel object-centric planning paradigm and develops the first object-centric planner for general nonprehensile rearrangement problems. By assuming that each object can actively move without being driven by robot interactions, the object-centric planner focuses on planning desired object motions, which are realized via robot actions generated online via a closed-loop pushing strategy. Through extensive experiments and in comparison with state-of-the-art baselines in both simulation and on a physical robot, we show that our object-centric paradigm can generate more intuitive and task-effective robot actions with significantly improved efficiency. In addition, we propose a benchmarking protocol to standardize and facilitate future research in nonprehensile rearrangement.
Read more10/2/2024

0
Kinodynamic Motion Planning for Collaborative Object Transportation by Multiple Mobile Manipulators
Keshab Patra, Arpita Sinha, Anirban Guha
This work proposes a kinodynamic motion planning technique for collaborative object transportation by multiple mobile manipulators in dynamic environments. A global path planner computes a linear piecewise path from start to goal. A novel algorithm detects the narrow regions between the static obstacles and aids in defining the obstacle-free region to enhance the feasibility of the global path. We then formulate a local online motion planning technique for trajectory generation that minimizes the control efforts in a receding horizon manner. It plans the trajectory for finite time horizons, considering the kinodynamic constraints and the static and dynamic obstacles. The planning technique jointly plans for the mobile bases and the arms to utilize the locomotion capability of the mobile base and the manipulation capability of the arm efficiently. We use a convex cone approach to avoid self-collision of the formation by modifying the mobile manipulators admissible state without imposing additional constraints. Numerical simulations and hardware experiments showcase the efficiency of the proposed approach.
Read more9/24/2024

0
Efficient optimization-based trajectory planning
Jiayu Fan, Nikolce Murgovski, Jun Liang
This research addresses the increasing demand for advanced navigation systems capable of operating within confined surroundings. A significant challenge in this field is developing an efficient planning framework that can generalize across various types of collision avoidance missions. Utilizing numerical optimal control techniques, this study proposes a unified optimization-based planning framework to meet these demands. We focus on handling two collision avoidance problems, i.e., the object not colliding with obstacles and not colliding with boundaries of the constrained region. The object or obstacle is denoted as a union of convex polytopes and ellipsoids, and the constrained region is denoted as an intersection of such convex sets. Using these representations, collision avoidance can be approached by formulating explicit constraints that separate two convex sets, or ensure that a convex set is contained in another convex set, referred to as separating constraints and containing constraints, respectively. We propose to use the hyperplane separation theorem to formulate differentiable separating constraints, and utilize the S-procedure and geometrical methods to formulate smooth containing constraints. We state that compared to the state of the art, the proposed formulations allow a considerable reduction in nonlinear program size and geometry-based initialization in auxiliary variables used to formulate collision avoidance constraints. Finally, the efficacy of the proposed unified planning framework is evaluated in two contexts, autonomous parking in tractor-trailer vehicles and overtaking on curved lanes. The results in both cases exhibit an improved computational performance compared to existing methods.
Read more7/9/2024