Object Depth and Size Estimation using Stereo-vision and Integration with SLAM

0

Sign in to get full access
Overview
- Object depth and size estimation using stereo vision and integration with SLAM (Simultaneous Localization and Mapping)
- Leverages stereo cameras to estimate depth and size of objects
- Integrates depth information with SLAM for improved navigation and obstacle avoidance
- Potential applications in robotics, autonomous vehicles, and augmented reality
Plain English Explanation
In this research, the authors developed a system that can estimate the depth and size of objects using a pair of cameras (stereo vision). This depth information is then combined with SLAM (Simultaneous Localization and Mapping) to help a robot or vehicle better understand its surroundings and navigate more effectively.
The key idea is that by using two cameras, the system can triangulate the distance to an object and determine its size. This depth and size information is crucial for tasks like robot navigation, obstacle avoidance, and even augmented reality. By integrating this depth data with SLAM, the system can build a more accurate 3D map of the environment and use that to plan safer and more efficient routes.
The researchers tested their system in various indoor and outdoor environments, demonstrating its ability to reliably estimate object depths and sizes. This technology could be particularly useful for indoor mapping and construction applications, where having precise information about the size and location of objects is crucial.
Technical Explanation
The proposed system consists of two main components:
-
Stereo Vision-based Depth and Size Estimation: The system uses a pair of calibrated cameras to capture stereo images of the environment. By analyzing the disparity between the images, it can calculate the depth of objects. Additionally, the system can estimate the size of objects by using the known camera parameters and the computed depth.
-
Integration with SLAM: The depth and size information from the stereo vision module is then integrated with a SLAM system. This allows the robot or vehicle to build a more accurate 3D map of its surroundings, which can be used for improved navigation, obstacle avoidance, and other tasks.
The researchers evaluated their system in various indoor and outdoor scenarios, testing its performance in terms of depth and size estimation accuracy, as well as its integration with SLAM. The results demonstrate the system's ability to reliably estimate object depths and sizes, and its effectiveness in improving the performance of SLAM-based navigation and mapping.
Critical Analysis
The paper presents a promising approach for integrating depth and size estimation with SLAM, but there are a few potential limitations and areas for further research:
-
Sensitivity to Lighting Conditions: Stereo vision-based depth estimation can be sensitive to lighting conditions, which may affect the accuracy of the system in certain environments. The authors could explore ways to make the system more robust to varying lighting conditions.
-
Scalability to Complex Environments: The evaluation was conducted in relatively simple indoor and outdoor scenarios. It would be interesting to see how the system performs in more complex, cluttered environments with a larger number of objects.
-
Real-time Performance: The paper does not provide detailed information about the computational requirements and real-time performance of the system. This would be an important consideration for practical applications, such as autonomous navigation or augmented reality.
-
Comparison to Alternative Depth Sensing Technologies: While the paper discusses the integration with SLAM, it could be valuable to compare the performance of the stereo vision-based depth estimation to other depth sensing technologies, such as LiDAR or depth cameras, to better understand the strengths and limitations of each approach.
Conclusion
This research presents a novel approach for integrating stereo vision-based depth and size estimation with SLAM, with the goal of improving the performance of robot navigation, obstacle avoidance, and other applications. The results demonstrate the feasibility of this approach and its potential benefits, but further research is needed to address the identified limitations and explore its applicability in more complex, real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Object Depth and Size Estimation using Stereo-vision and Integration with SLAM
Layth Hamad, Muhammad Asif Khan, Amr Mohamed
Autonomous robots use simultaneous localization and mapping (SLAM) for efficient and safe navigation in various environments. LiDAR sensors are integral in these systems for object identification and localization. However, LiDAR systems though effective in detecting solid objects (e.g., trash bin, bottle, etc.), encounter limitations in identifying semitransparent or non-tangible objects (e.g., fire, smoke, steam, etc.) due to poor reflecting characteristics. Additionally, LiDAR also fails to detect features such as navigation signs and often struggles to detect certain hazardous materials that lack a distinct surface for effective laser reflection. In this paper, we propose a highly accurate stereo-vision approach to complement LiDAR in autonomous robots. The system employs advanced stereo vision-based object detection to detect both tangible and non-tangible objects and then uses simple machine learning to precisely estimate the depth and size of the object. The depth and size information is then integrated into the SLAM process to enhance the robot's navigation capabilities in complex environments. Our evaluation, conducted on an autonomous robot equipped with LiDAR and stereo-vision systems demonstrates high accuracy in the estimation of an object's depth and size. A video illustration of the proposed scheme is available at: url{https://www.youtube.com/watch?v=nusI6tA9eSk}.
Read more9/14/2024
0
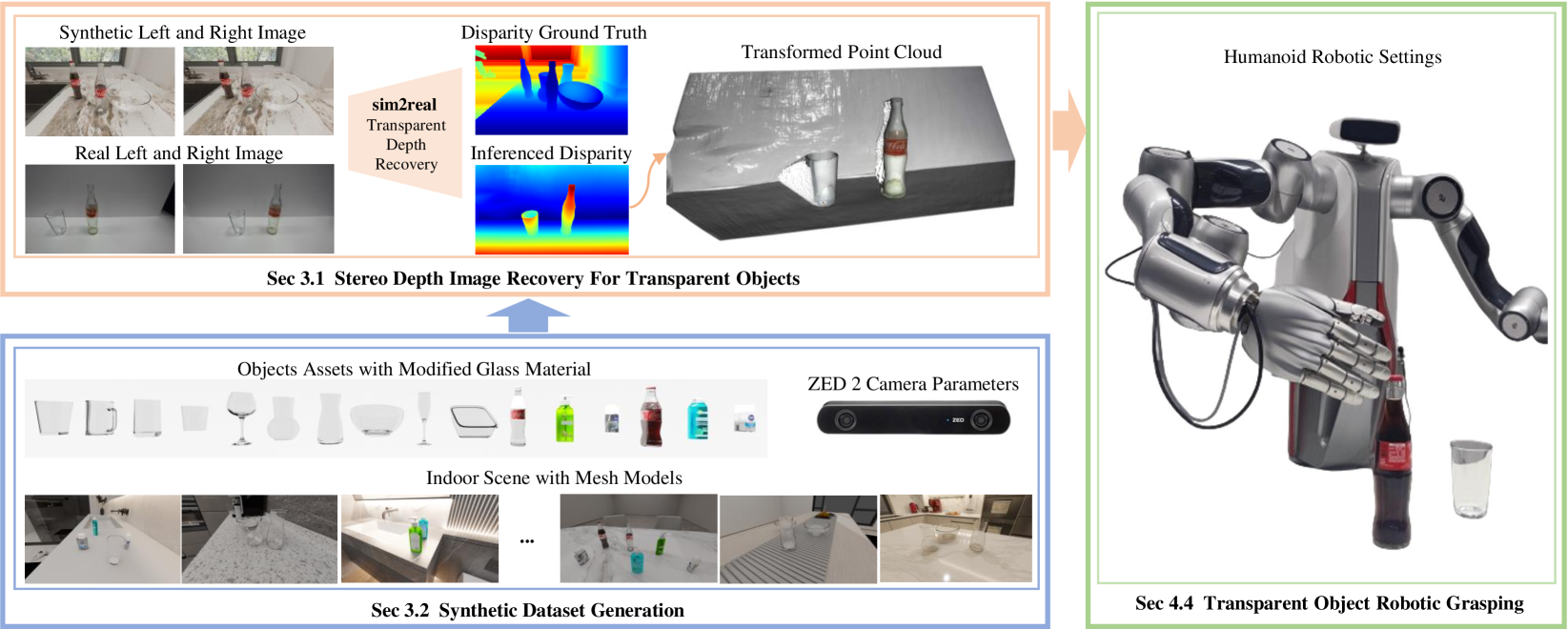
ClearDepth: Enhanced Stereo Perception of Transparent Objects for Robotic Manipulation
Kaixin Bai, Huajian Zeng, Lei Zhang, Yiwen Liu, Hongli Xu, Zhaopeng Chen, Jianwei Zhang
Transparent object depth perception poses a challenge in everyday life and logistics, primarily due to the inability of standard 3D sensors to accurately capture depth on transparent or reflective surfaces. This limitation significantly affects depth map and point cloud-reliant applications, especially in robotic manipulation. We developed a vision transformer-based algorithm for stereo depth recovery of transparent objects. This approach is complemented by an innovative feature post-fusion module, which enhances the accuracy of depth recovery by structural features in images. To address the high costs associated with dataset collection for stereo camera-based perception of transparent objects, our method incorporates a parameter-aligned, domain-adaptive, and physically realistic Sim2Real simulation for efficient data generation, accelerated by AI algorithm. Our experimental results demonstrate the model's exceptional Sim2Real generalizability in real-world scenarios, enabling precise depth mapping of transparent objects to assist in robotic manipulation. Project details are available at https://sites.google.com/view/cleardepth/ .
Read more9/16/2024

0
LiDAR-based Real-Time Object Detection and Tracking in Dynamic Environments
Wenqiang Du, Giovanni Beltrame
In dynamic environments, the ability to detect and track moving objects in real-time is crucial for autonomous robots to navigate safely and effectively. Traditional methods for dynamic object detection rely on high accuracy odometry and maps to detect and track moving objects. However, these methods are not suitable for long-term operation in dynamic environments where the surrounding environment is constantly changing. In order to solve this problem, we propose a novel system for detecting and tracking dynamic objects in real-time using only LiDAR data. By emphasizing the extraction of low-frequency components from LiDAR data as feature points for foreground objects, our method significantly reduces the time required for object clustering and movement analysis. Additionally, we have developed a tracking approach that employs intensity-based ego-motion estimation along with a sliding window technique to assess object movements. This enables the precise identification of moving objects and enhances the system's resilience to odometry drift. Our experiments show that this system can detect and track dynamic objects in real-time with an average detection accuracy of 88.7% and a recall rate of 89.1%. Furthermore, our system demonstrates resilience against the prolonged drift typically associated with front-end only LiDAR odometry. All of the source code, labeled dataset, and the annotation tool are available at: https://github.com/MISTLab/lidar_dynamic_objects_detection.git
Read more7/8/2024
0
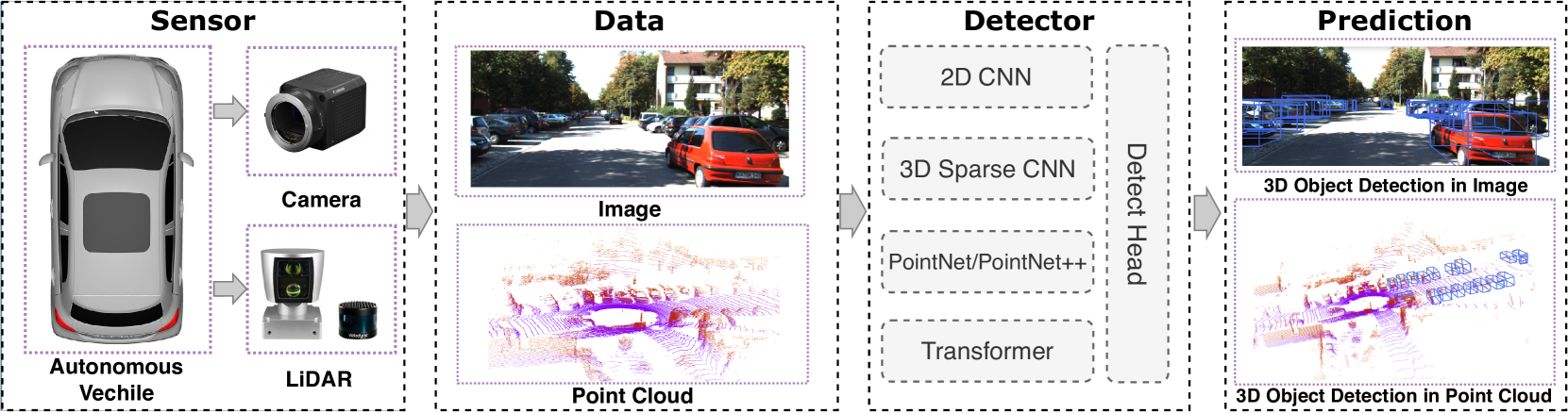
Robustness-Aware 3D Object Detection in Autonomous Driving: A Review and Outlook
Ziying Song, Lin Liu, Feiyang Jia, Yadan Luo, Guoxin Zhang, Lei Yang, Li Wang, Caiyan Jia
In the realm of modern autonomous driving, the perception system is indispensable for accurately assessing the state of the surrounding environment, thereby enabling informed prediction and planning. The key step to this system is related to 3D object detection that utilizes vehicle-mounted sensors such as LiDAR and cameras to identify the size, the category, and the location of nearby objects. Despite the surge in 3D object detection methods aimed at enhancing detection precision and efficiency, there is a gap in the literature that systematically examines their resilience against environmental variations, noise, and weather changes. This study emphasizes the importance of robustness, alongside accuracy and latency, in evaluating perception systems under practical scenarios. Our work presents an extensive survey of camera-only, LiDAR-only, and multi-modal 3D object detection algorithms, thoroughly evaluating their trade-off between accuracy, latency, and robustness, particularly on datasets like KITTI-C and nuScenes-C to ensure fair comparisons. Among these, multi-modal 3D detection approaches exhibit superior robustness, and a novel taxonomy is introduced to reorganize the literature for enhanced clarity. This survey aims to offer a more practical perspective on the current capabilities and the constraints of 3D object detection algorithms in real-world applications, thus steering future research towards robustness-centric advancements.
Read more8/16/2024