ClearDepth: Enhanced Stereo Perception of Transparent Objects for Robotic Manipulation

0
Sign in to get full access
Overview
- Presents ClearDepth, a method to enhance stereo perception of transparent objects for robotic manipulation
- Key innovations include:
- Using a physics-based model to estimate the distortion caused by transparent surfaces
- Leveraging this model to improve depth estimation and object segmentation
Plain English Explanation
ClearDepth is a new technique that helps robots better perceive the depth and shape of transparent objects. When robots try to interact with clear, see-through items like glass or plastic, it can be very difficult for them to accurately measure the object's distance and size. This is because the transparent surface distorts the light in ways that confuse traditional depth sensors.
ClearDepth addresses this problem by using a physics-based model to estimate how the transparent material bends and refracts the light. Armed with this knowledge, the system can then correct the depth measurements and more precisely determine the 3D shape of the object. This improved perception allows the robot to better plan how to grasp and manipulate the transparent item.
Technical Explanation
The key innovation in ClearDepth is the use of a physics-based model to account for the distorting effects of transparent surfaces on depth estimation. Typical stereo vision techniques assume a Lambertian reflectance model, which does not hold for transparent materials. ClearDepth instead models the refraction and reflection that occurs at the transparent interface.
Specifically, the system first estimates the normal vectors of the transparent surface using photometric stereo. It then uses these normals, along with the known refractive index of the material, to compute the expected distortion in the depth measurements. This distortion model is then incorporated into the stereo matching process to produce more accurate depth maps.
Additionally, ClearDepth leverages the distortion model to improve object segmentation. By identifying pixels that exhibit the characteristic distortion patterns of transparent surfaces, the system can more reliably separate the transparent object from the background.
Critical Analysis
The authors demonstrate the effectiveness of ClearDepth through extensive experiments on both synthetic and real-world datasets. The results show significant improvements in depth estimation and object segmentation accuracy compared to baseline stereo vision methods.
However, the approach does require prior knowledge of the refractive index of the transparent material, which may not always be available. Additionally, the model assumes a single, planar transparent surface, which may not hold for more complex transparent objects.
Further research could explore ways to relax these assumptions, such as by using learned distortion models or extending the technique to handle curved transparent surfaces. Integrating ClearDepth into a complete robotic manipulation pipeline and evaluating its real-world performance would also be an important next step.
Conclusion
Overall, ClearDepth represents an important advance in enabling robots to better perceive and interact with transparent objects. By accounting for the unique optical properties of transparent materials, the system can significantly improve depth estimation and object segmentation, laying the groundwork for more robust and capable robotic manipulation of clear, see-through items. As robots continue to take on more complex tasks in unstructured environments, techniques like ClearDepth will be increasingly crucial for enabling reliable and versatile robotic interaction with the world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ClearDepth: Enhanced Stereo Perception of Transparent Objects for Robotic Manipulation
Kaixin Bai, Huajian Zeng, Lei Zhang, Yiwen Liu, Hongli Xu, Zhaopeng Chen, Jianwei Zhang
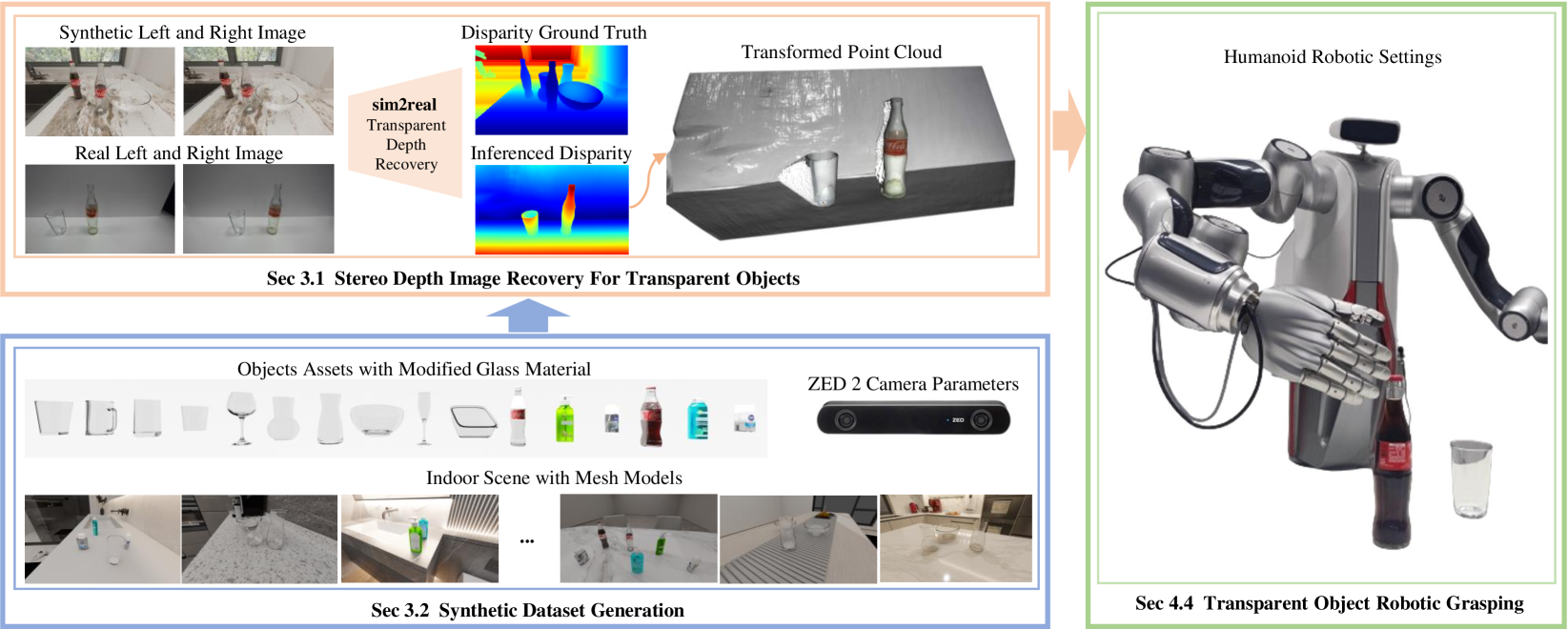
Transparent object depth perception poses a challenge in everyday life and logistics, primarily due to the inability of standard 3D sensors to accurately capture depth on transparent or reflective surfaces. This limitation significantly affects depth map and point cloud-reliant applications, especially in robotic manipulation. We developed a vision transformer-based algorithm for stereo depth recovery of transparent objects. This approach is complemented by an innovative feature post-fusion module, which enhances the accuracy of depth recovery by structural features in images. To address the high costs associated with dataset collection for stereo camera-based perception of transparent objects, our method incorporates a parameter-aligned, domain-adaptive, and physically realistic Sim2Real simulation for efficient data generation, accelerated by AI algorithm. Our experimental results demonstrate the model's exceptional Sim2Real generalizability in real-world scenarios, enabling precise depth mapping of transparent objects to assist in robotic manipulation. Project details are available at https://sites.google.com/view/cleardepth/ .
Read more9/16/2024

0
Transparent Object Depth Completion
Yifan Zhou, Wanli Peng, Zhongyu Yang, He Liu, Yi Sun
The perception of transparent objects for grasp and manipulation remains a major challenge, because existing robotic grasp methods which heavily rely on depth maps are not suitable for transparent objects due to their unique visual properties. These properties lead to gaps and inaccuracies in the depth maps of the transparent objects captured by depth sensors. To address this issue, we propose an end-to-end network for transparent object depth completion that combines the strengths of single-view RGB-D based depth completion and multi-view depth estimation. Moreover, we introduce a depth refinement module based on confidence estimation to fuse predicted depth maps from single-view and multi-view modules, which further refines the restored depth map. The extensive experiments on the ClearPose and TransCG datasets demonstrate that our method achieves superior accuracy and robustness in complex scenarios with significant occlusion compared to the state-of-the-art methods.
Read more5/27/2024

0
Depth Restoration of Hand-Held Transparent Objects for Human-to-Robot Handover
Ran Yu, Haixin Yu, Shoujie Li, Huang Yan, Ziwu Song, Wenbo Ding
Transparent objects are common in daily life, while their optical properties pose challenges for RGB-D cameras to capture accurate depth information. This issue is further amplified when these objects are hand-held, as hand occlusions further complicate depth estimation. For assistant robots, however, accurately perceiving hand-held transparent objects is critical to effective human-robot interaction. This paper presents a Hand-Aware Depth Restoration (HADR) method based on creating an implicit neural representation function from a single RGB-D image. The proposed method utilizes hand posture as an important guidance to leverage semantic and geometric information of hand-object interaction. To train and evaluate the proposed method, we create a high-fidelity synthetic dataset named TransHand-14K with a real-to-sim data generation scheme. Experiments show that our method has better performance and generalization ability compared with existing methods. We further develop a real-world human-to-robot handover system based on HADR, demonstrating its potential in human-robot interaction applications.
Read more9/17/2024

0
Object Depth and Size Estimation using Stereo-vision and Integration with SLAM
Layth Hamad, Muhammad Asif Khan, Amr Mohamed
Autonomous robots use simultaneous localization and mapping (SLAM) for efficient and safe navigation in various environments. LiDAR sensors are integral in these systems for object identification and localization. However, LiDAR systems though effective in detecting solid objects (e.g., trash bin, bottle, etc.), encounter limitations in identifying semitransparent or non-tangible objects (e.g., fire, smoke, steam, etc.) due to poor reflecting characteristics. Additionally, LiDAR also fails to detect features such as navigation signs and often struggles to detect certain hazardous materials that lack a distinct surface for effective laser reflection. In this paper, we propose a highly accurate stereo-vision approach to complement LiDAR in autonomous robots. The system employs advanced stereo vision-based object detection to detect both tangible and non-tangible objects and then uses simple machine learning to precisely estimate the depth and size of the object. The depth and size information is then integrated into the SLAM process to enhance the robot's navigation capabilities in complex environments. Our evaluation, conducted on an autonomous robot equipped with LiDAR and stereo-vision systems demonstrates high accuracy in the estimation of an object's depth and size. A video illustration of the proposed scheme is available at: url{https://www.youtube.com/watch?v=nusI6tA9eSk}.
Read more9/14/2024