Object Manipulation in Marine Environments using Reinforcement Learning

0
Sign in to get full access
Overview
- This paper provides guidelines for the formatting and submission of papers to IFAC (International Federation of Automatic Control) conferences and symposia.
- The key recommendations include using title case for the paper title, following specific formatting rules for section headings, figures, equations, and references, and adhering to page limits and other submission requirements.
Plain English Explanation
This paper outlines the style and formatting guidelines that authors should follow when submitting papers to IFAC (International Federation of Automatic Control) conferences and symposia. The main points include:
- Use title case for the paper title, where the first letter of each major word is capitalized.
- Properly format section headings, figures, equations, and references according to the provided specifications.
- Adhere to page limits and other submission requirements to ensure your paper is accepted.
Following these guidelines helps ensure a consistent and professional appearance for all papers presented at IFAC events. This makes it easier for organizers to review and compile the proceedings, and helps readers navigate the content more effectively.
Technical Explanation
The paper outlines the formatting and submission guidelines for papers to be presented at IFAC (International Federation of Automatic Control) conferences and symposia. Key recommendations include:
- Using title case for the paper title, where the first letter of each major word is capitalized.
- Properly formatting section headings, figures, equations, and references according to the provided specifications.
- Adhering to page limits and other submission requirements to ensure the paper is accepted.
These guidelines help maintain a consistent and professional appearance across all papers presented at IFAC events. This makes it easier for organizers to review and compile the proceedings, and helps readers navigate the content more effectively.
Critical Analysis
The paper provides clear and comprehensive guidelines for authors submitting papers to IFAC conferences and symposia. The recommendations are well-justified, as they help ensure a uniform presentation style that facilitates the review and publication process.
One potential limitation is the level of detail required, which may be burdensome for some authors. However, this level of rigor is likely necessary to uphold the quality standards of IFAC events. Additionally, the guidelines are commonly used in academic publishing, so many authors may already be familiar with them.
Overall, the paper serves an important purpose in maintaining the integrity and accessibility of IFAC publications. Adhering to these guidelines helps authors prepare high-quality submissions that can be easily integrated into the final conference or symposium proceedings.
Conclusion
This paper outlines the formatting and submission guidelines for authors presenting papers at IFAC (International Federation of Automatic Control) conferences and symposia. The key recommendations include using title case for the paper title, properly formatting section headings, figures, equations, and references, and adhering to page limits and other requirements.
Following these guidelines helps ensure a consistent and professional appearance across all IFAC publications, which benefits both organizers and readers. While the level of detail may be burdensome for some authors, the guidelines are necessary to uphold the quality standards of these prestigious academic events.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Object Manipulation in Marine Environments using Reinforcement Learning
Ahmed Nader, Muhayy Ud Din, Mughni Irfan, Irfan Hussain
Performing intervention tasks in the maritime domain is crucial for safety and operational efficiency. The unpredictable and dynamic marine environment makes the intervention tasks such as object manipulation extremely challenging. This study proposes a robust solution for object manipulation from a dock in the presence of disturbances caused by sea waves. To tackle this challenging problem, we apply a deep reinforcement learning (DRL) based algorithm called Soft. Actor-Critic (SAC). SAC employs an actor-critic framework; the actors learn a policy that minimizes an objective function while the critic evaluates the learned policy and provides feedback to guide the actor-learning process. We trained the agent using the PyBullet dynamic simulator and tested it in a realistic simulation environment called MBZIRC maritime simulator. This simulator allows the simulation of different wave conditions according to the World Meteorological Organization (WMO) sea state code. Simulation results demonstrate a high success rate in retrieving the objects from the dock. The trained agent achieved an 80 percent success rate when applied in the simulation environment in the presence of waves characterized by sea state 2, according to the WMO sea state code
Read more6/6/2024

0
Trajectory Planning for Teleoperated Space Manipulators Using Deep Reinforcement Learning
Bo Xia, Xianru Tian, Bo Yuan, Zhiheng Li, Bin Liang, Xueqian Wang
Trajectory planning for teleoperated space manipulators involves challenges such as accurately modeling system dynamics, particularly in free-floating modes with non-holonomic constraints, and managing time delays that increase model uncertainty and affect control precision. Traditional teleoperation methods rely on precise dynamic models requiring complex parameter identification and calibration, while data-driven methods do not require prior knowledge but struggle with time delays. A novel framework utilizing deep reinforcement learning (DRL) is introduced to address these challenges. The framework incorporates three methods: Mapping, Prediction, and State Augmentation, to handle delays when delayed state information is received at the master end. The Soft Actor Critic (SAC) algorithm processes the state information to compute the next action, which is then sent to the remote manipulator for environmental interaction. Four environments are constructed using the MuJoCo simulation platform to account for variations in base and target fixation: fixed base and target, fixed base with rotated target, free-floating base with fixed target, and free-floating base with rotated target. Extensive experiments with both constant and random delays are conducted to evaluate the proposed methods. Results demonstrate that all three methods effectively address trajectory planning challenges, with State Augmentation showing superior efficiency and robustness.
Read more8/13/2024

0
Aquatic Navigation: A Challenging Benchmark for Deep Reinforcement Learning
Davide Corsi, Davide Camponogara, Alessandro Farinelli
An exciting and promising frontier for Deep Reinforcement Learning (DRL) is its application to real-world robotic systems. While modern DRL approaches achieved remarkable successes in many robotic scenarios (including mobile robotics, surgical assistance, and autonomous driving) unpredictable and non-stationary environments can pose critical challenges to such methods. These features can significantly undermine fundamental requirements for a successful training process, such as the Markovian properties of the transition model. To address this challenge, we propose a new benchmarking environment for aquatic navigation using recent advances in the integration between game engines and DRL. In more detail, we show that our benchmarking environment is problematic even for state-of-the-art DRL approaches that may struggle to generate reliable policies in terms of generalization power and safety. Specifically, we focus on PPO, one of the most widely accepted algorithms, and we propose advanced training techniques (such as curriculum learning and learnable hyperparameters). Our extensive empirical evaluation shows that a well-designed combination of these ingredients can achieve promising results. Our simulation environment and training baselines are freely available to facilitate further research on this open problem and encourage collaboration in the field.
Read more6/3/2024
0
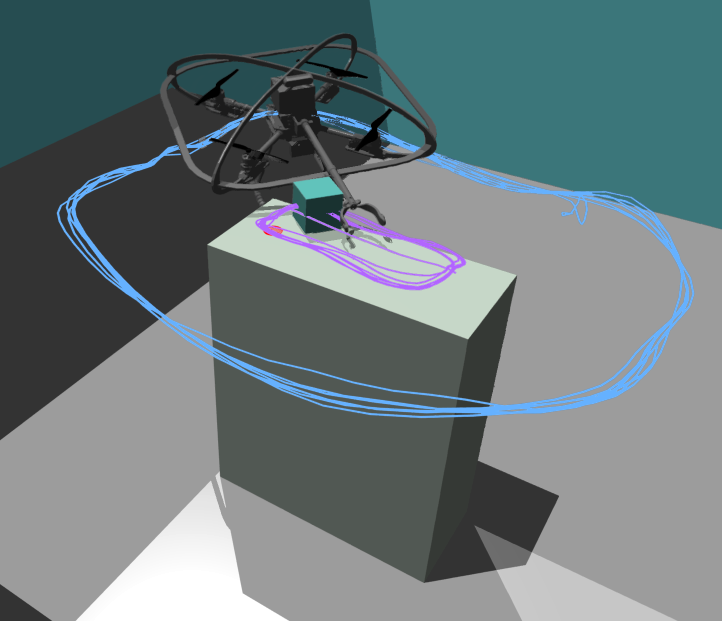
Non-Prehensile Aerial Manipulation using Model-Based Deep Reinforcement Learning
Cora A. Dimmig, Marin Kobilarov
With the continual adoption of Uncrewed Aerial Vehicles (UAVs) across a wide-variety of application spaces, robust aerial manipulation remains a key research challenge. Aerial manipulation tasks require interacting with objects in the environment, often without knowing their dynamical properties like mass and friction a priori. Additionally, interacting with these objects can have a significant impact on the control and stability of the vehicle. We investigated an approach for robust control and non-prehensile aerial manipulation in unknown environments. In particular, we use model-based Deep Reinforcement Learning (DRL) to learn a world model of the environment while simultaneously learning a policy for interaction with the environment. We evaluated our approach on a series of push tasks by moving an object between goal locations and demonstrated repeatable behaviors across a range of friction values.
Read more7/2/2024